Downloaded 230 times
![For an index record <I, tuple-identifier> I = (I 0 , I 1 , … I n ) n = Number of Dimensions in the Geometry Each I is a set of the form [a,b] describing the range of the rectangle along the dimension a or b can be equal to infinity Tuple-identifier points to a record Non-leaf nodes are in the form: <I, child-pointer>](https://image.slidesharecdn.com/dataindexingpresentation-110818065807-phpapp02/75/Indexing-Data-Structure-11-2048.jpg)
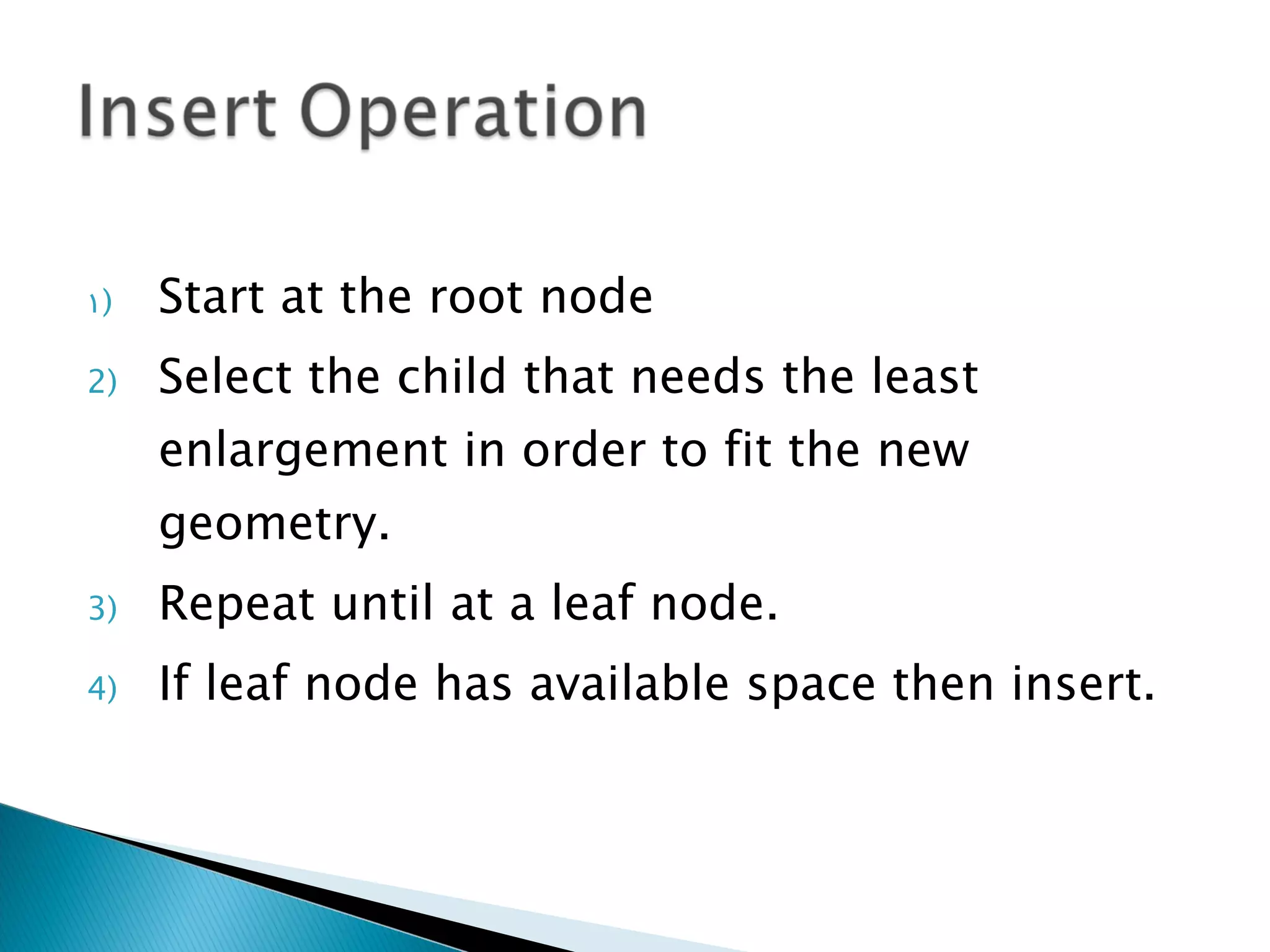
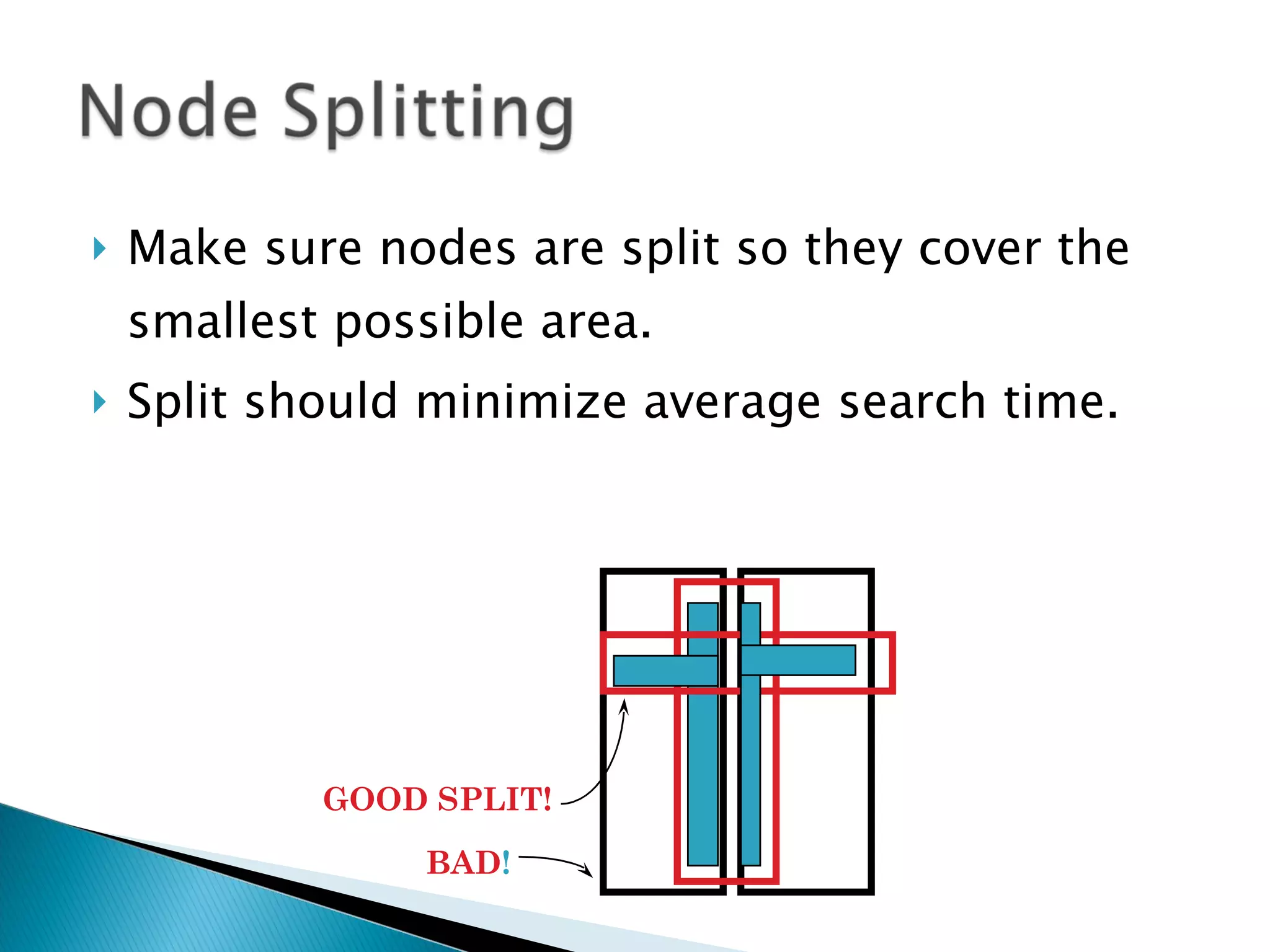
![Else split the entry into two nodes. Update parent nodes Update the entry that pointed to the node with a new MBR [ Minimum Bounding Rectangle ] . Add a new entry for the second new node If there is no space in the parent node, split and repeat.](https://image.slidesharecdn.com/dataindexingpresentation-110818065807-phpapp02/75/Indexing-Data-Structure-18-2048.jpg)
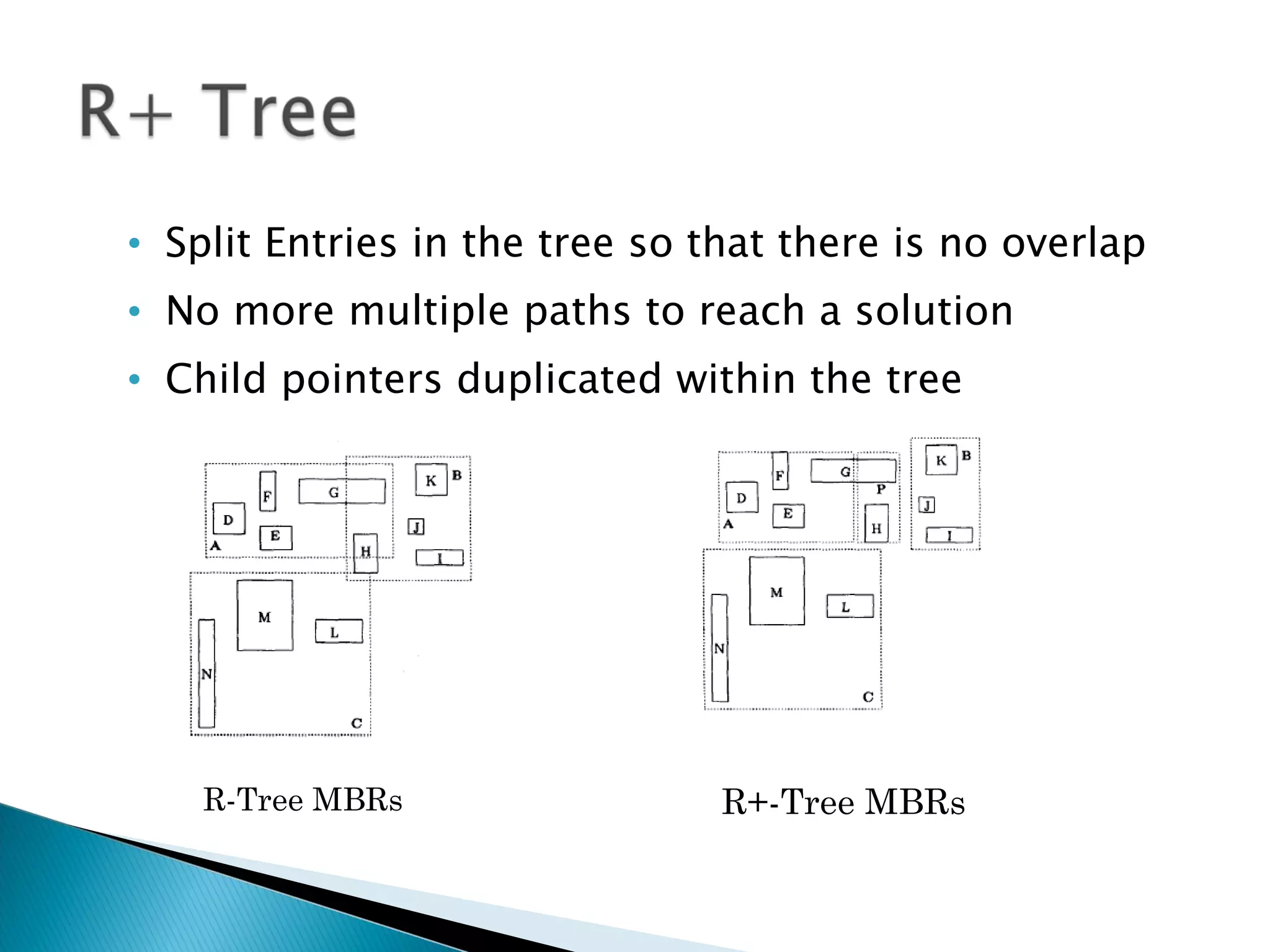

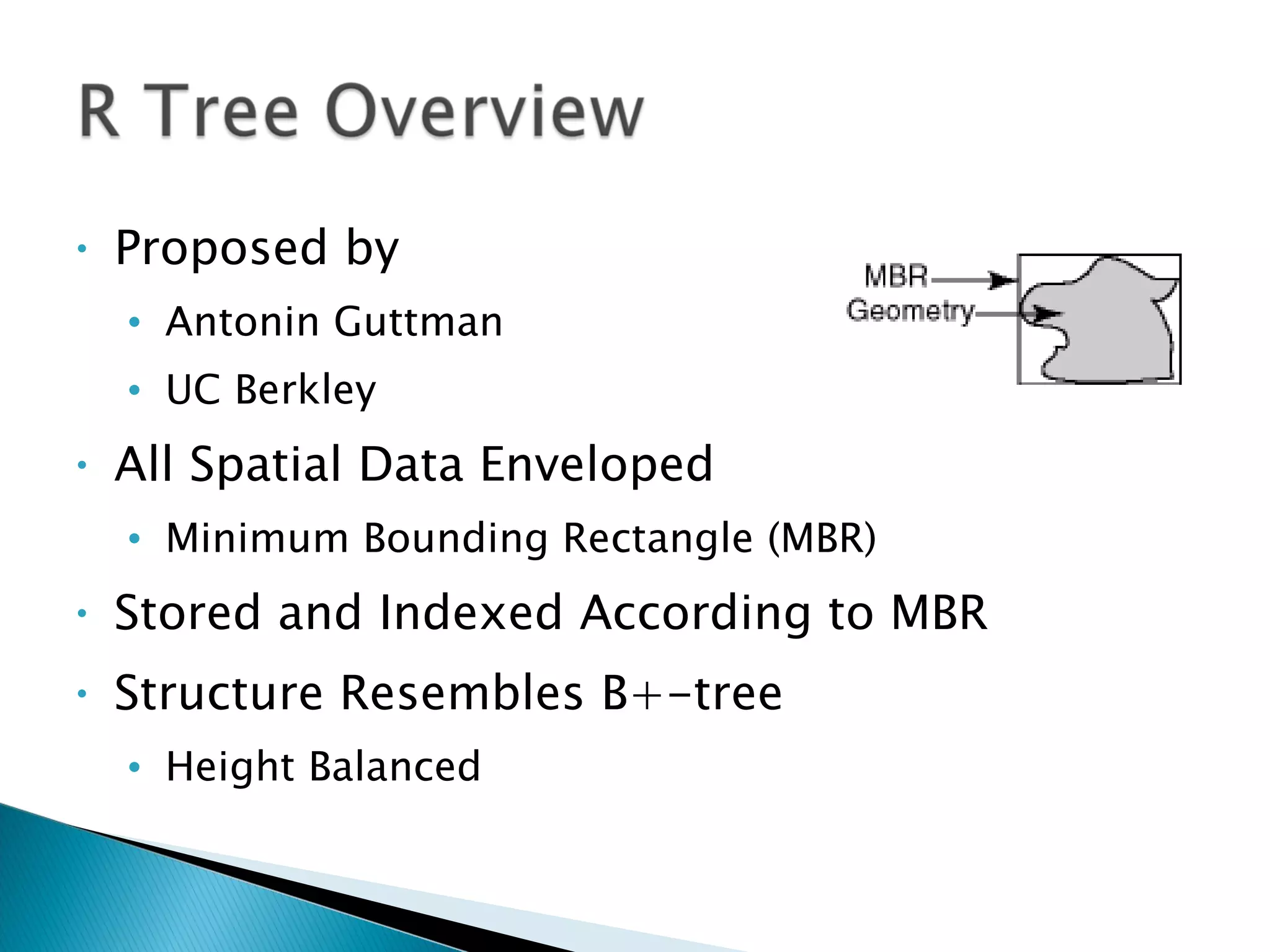
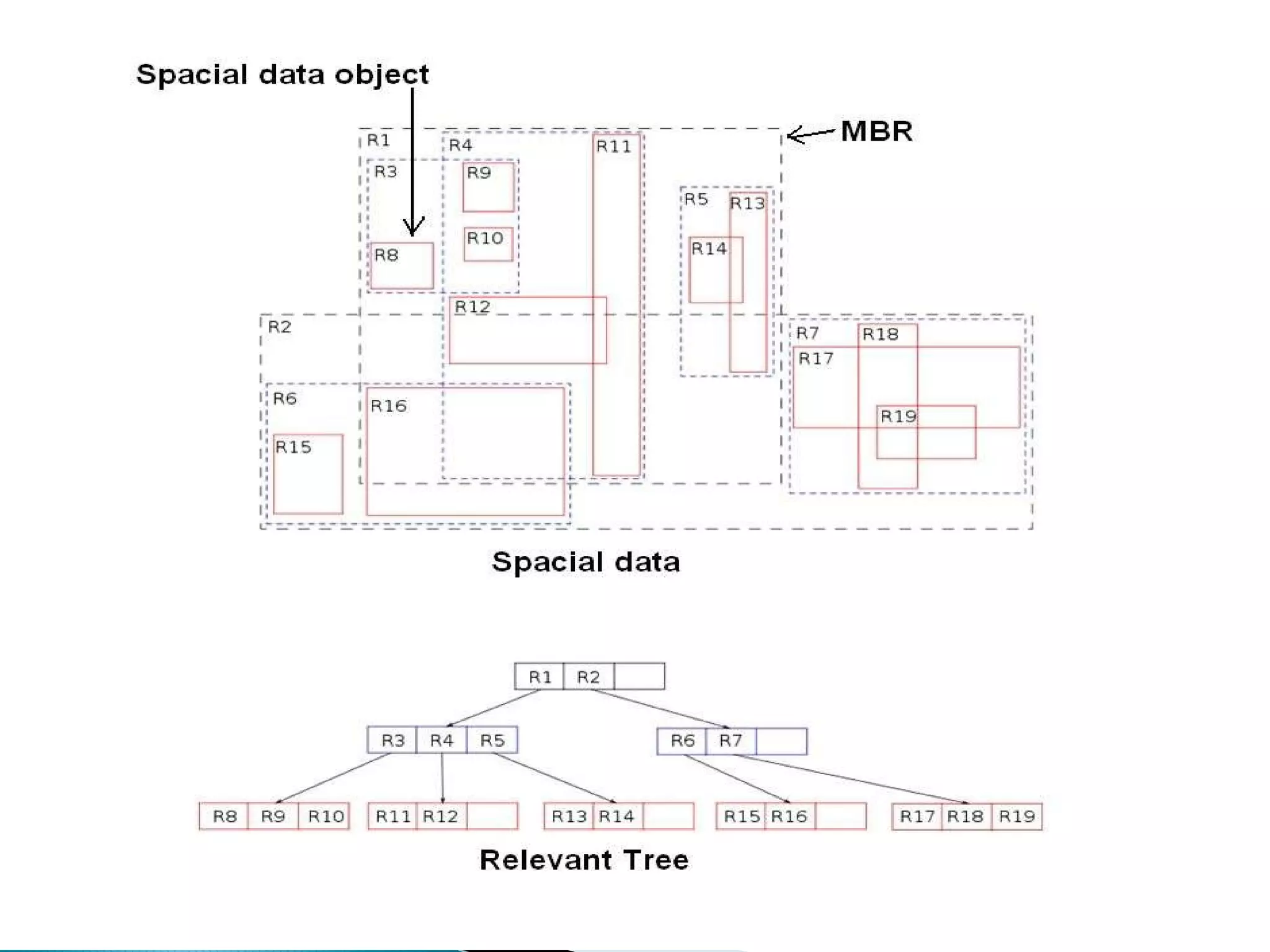
The document discusses R-trees, a data structure used to index multi-dimensional spatial data. R-trees allow for efficient searching of spatial data by grouping data into minimum bounding rectangles (MBRs) and storing them in a tree structure based on these envelopes. The tree structure resembles a B+-tree, with internal nodes containing pointers to child nodes or data records. R-trees provide efficient search, insertion, and deletion of spatial data objects through operations on the tree structure and splitting or merging of nodes as needed.