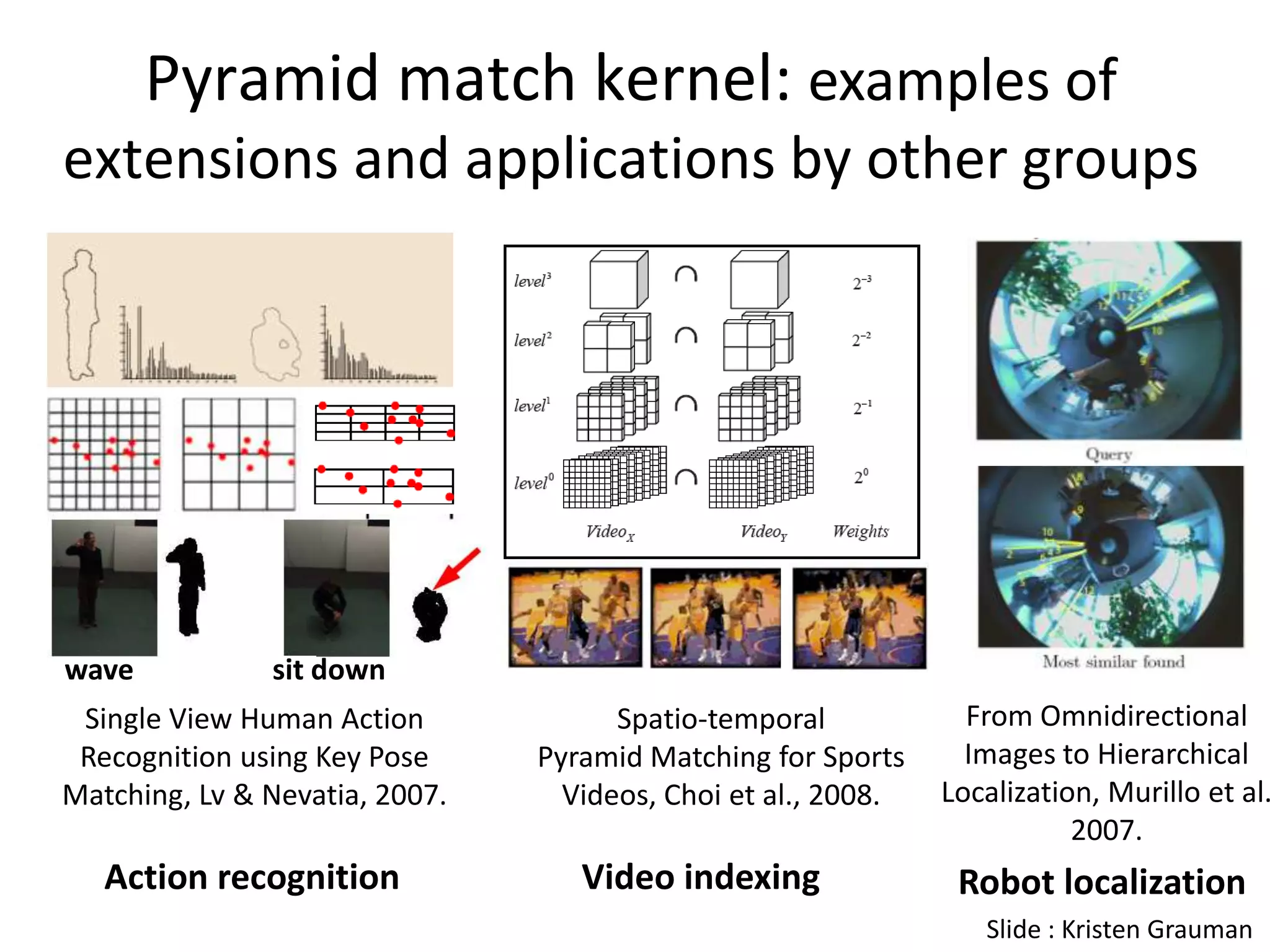
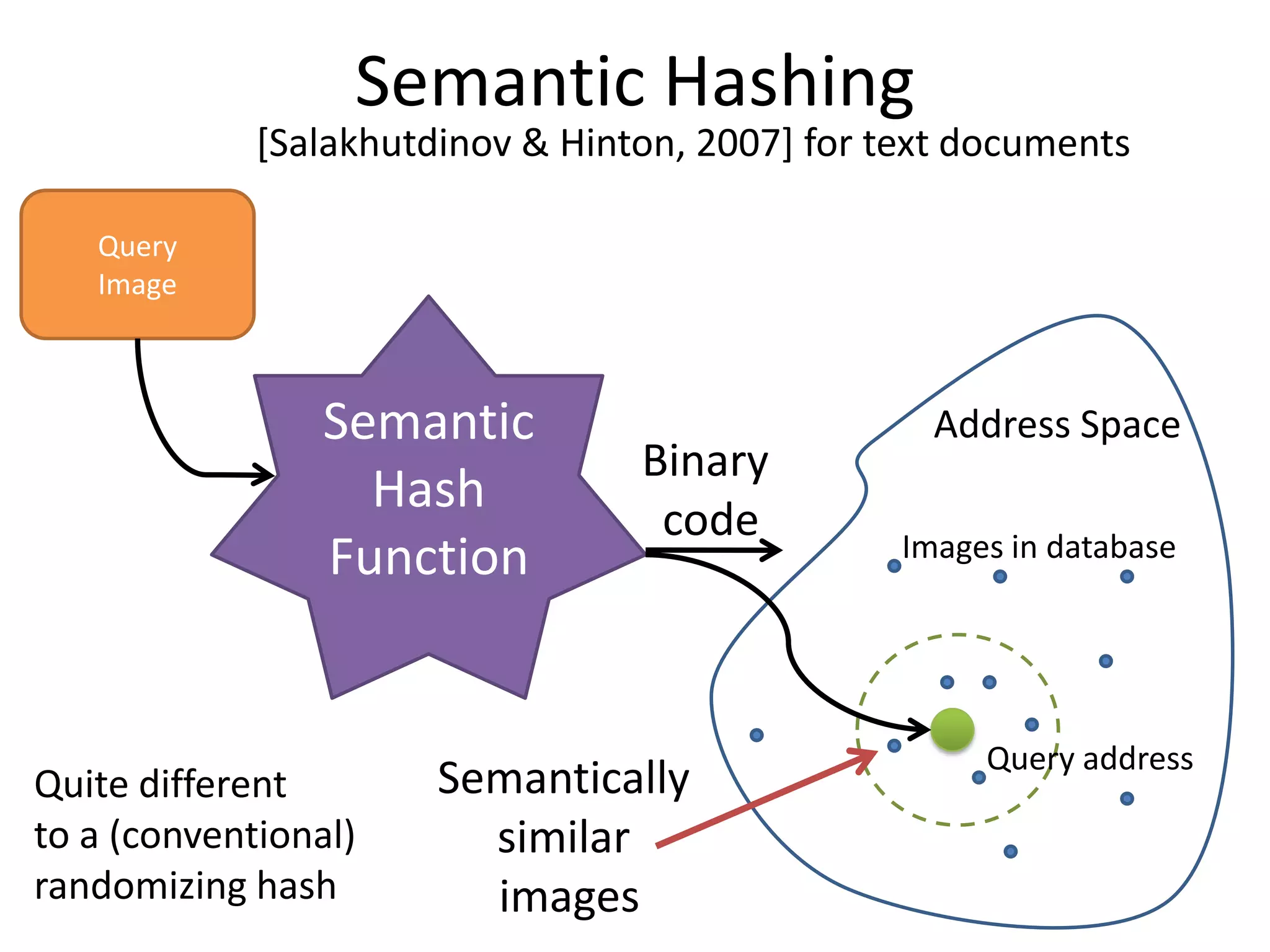
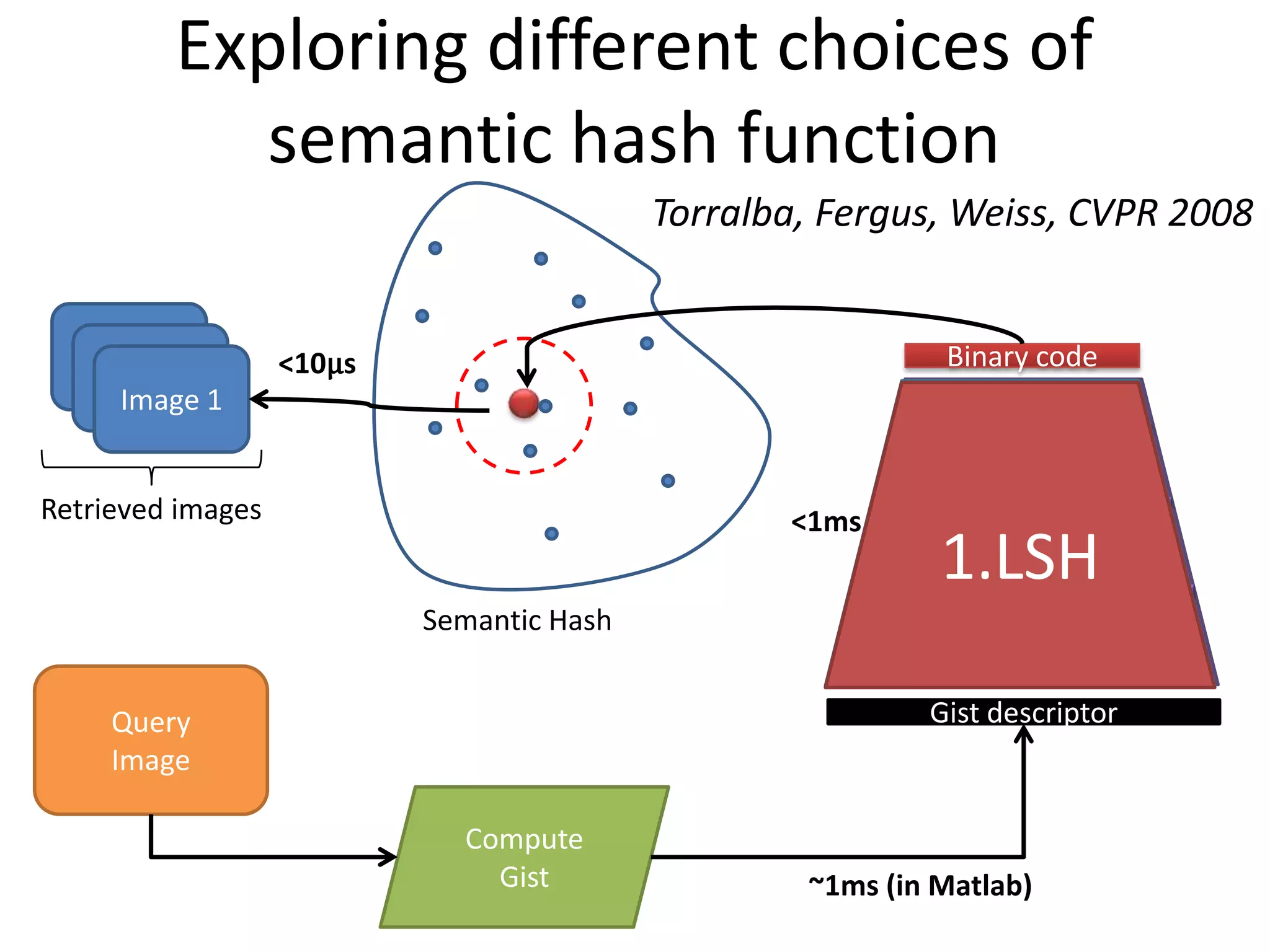
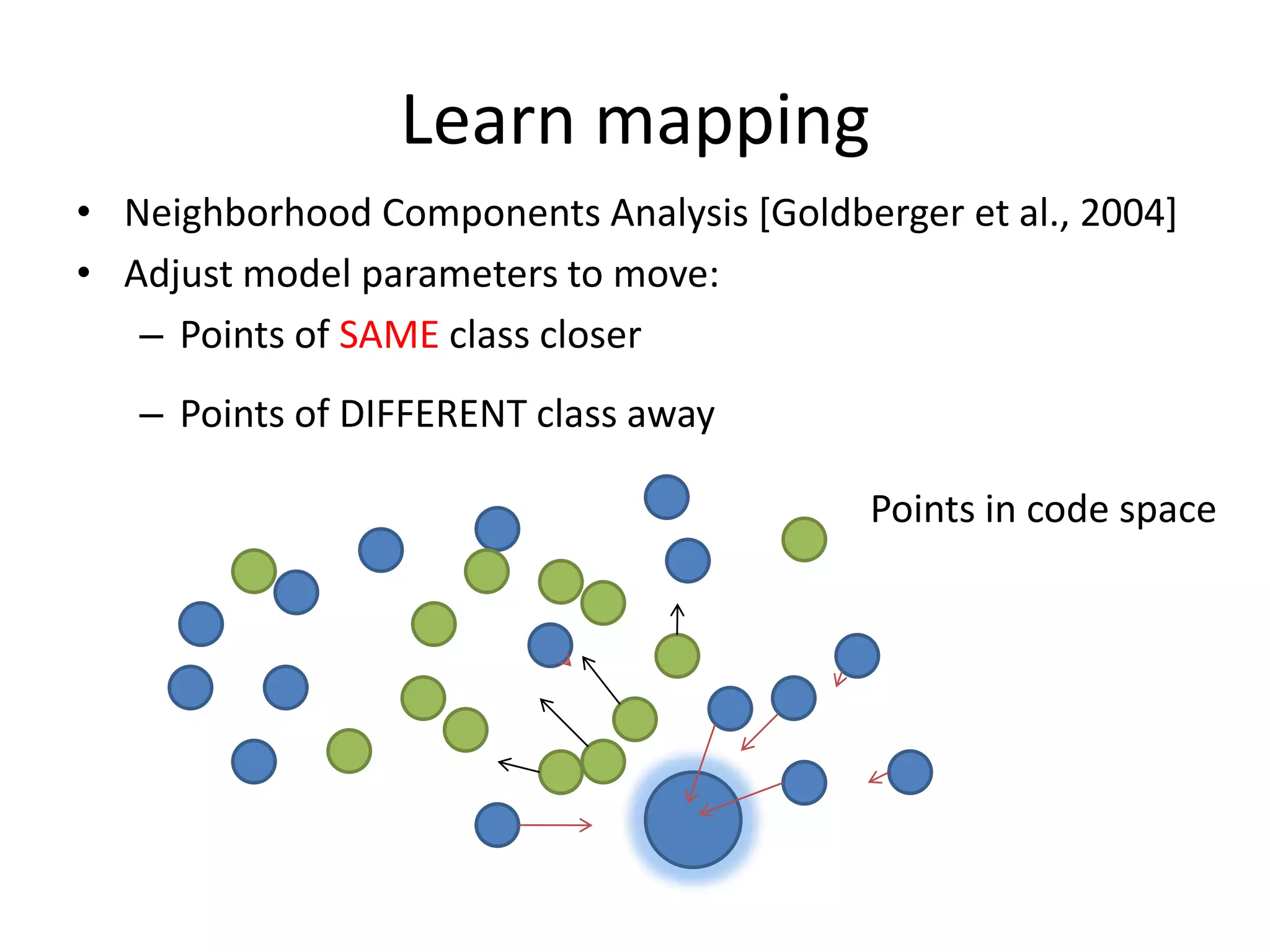
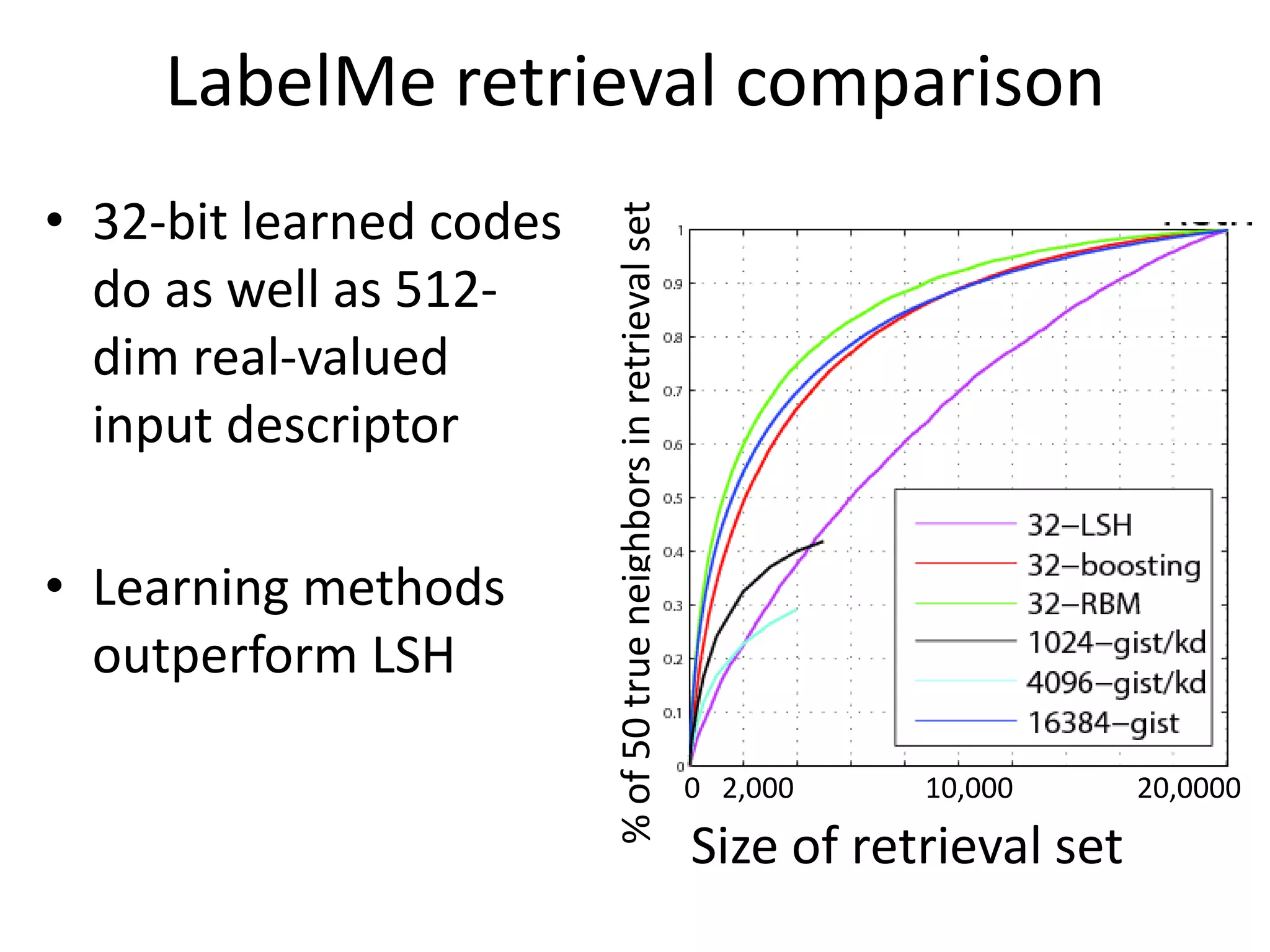
The document discusses techniques for large scale image recognition and retrieval. It focuses on methods for efficiently matching large numbers of images such as the pyramid match kernel which speeds up matching by partitioning feature spaces. It also covers learning to compare images by exploiting similarity constraints from labeled data to construct more useful distance functions. Finally, it discusses learning compact binary image descriptors through techniques like semantic hashing to allow very fast image search and retrieval.

![Comparing sets of local featuresPrevious strategies: Match features individually, vote on small sets to verify [Schmid, Lowe, Tuytelaars et al.]Explicit search for one-to-one correspondences [Rubner et al., Belongie et al., Gold & Rangarajan, Wallraven & Caputo, Berg et al., Zhang et al.,…]Bag-of-words: Compare frequencies of prototype features [Csurka et al., Sivic & Zisserman, Lazebnik & Ponce]Slide credit: Kristen Grauman](https://image.slidesharecdn.com/iccv2009recognitionandlearningobjectcategories-p2c01-recognizingalargenumberofobjectclasses-110514211401-phpapp01/75/Iccv2009-recognition-and-learning-object-categories-p2-c01-recognizing-a-large-number-of-object-classes-7-2048.jpg)
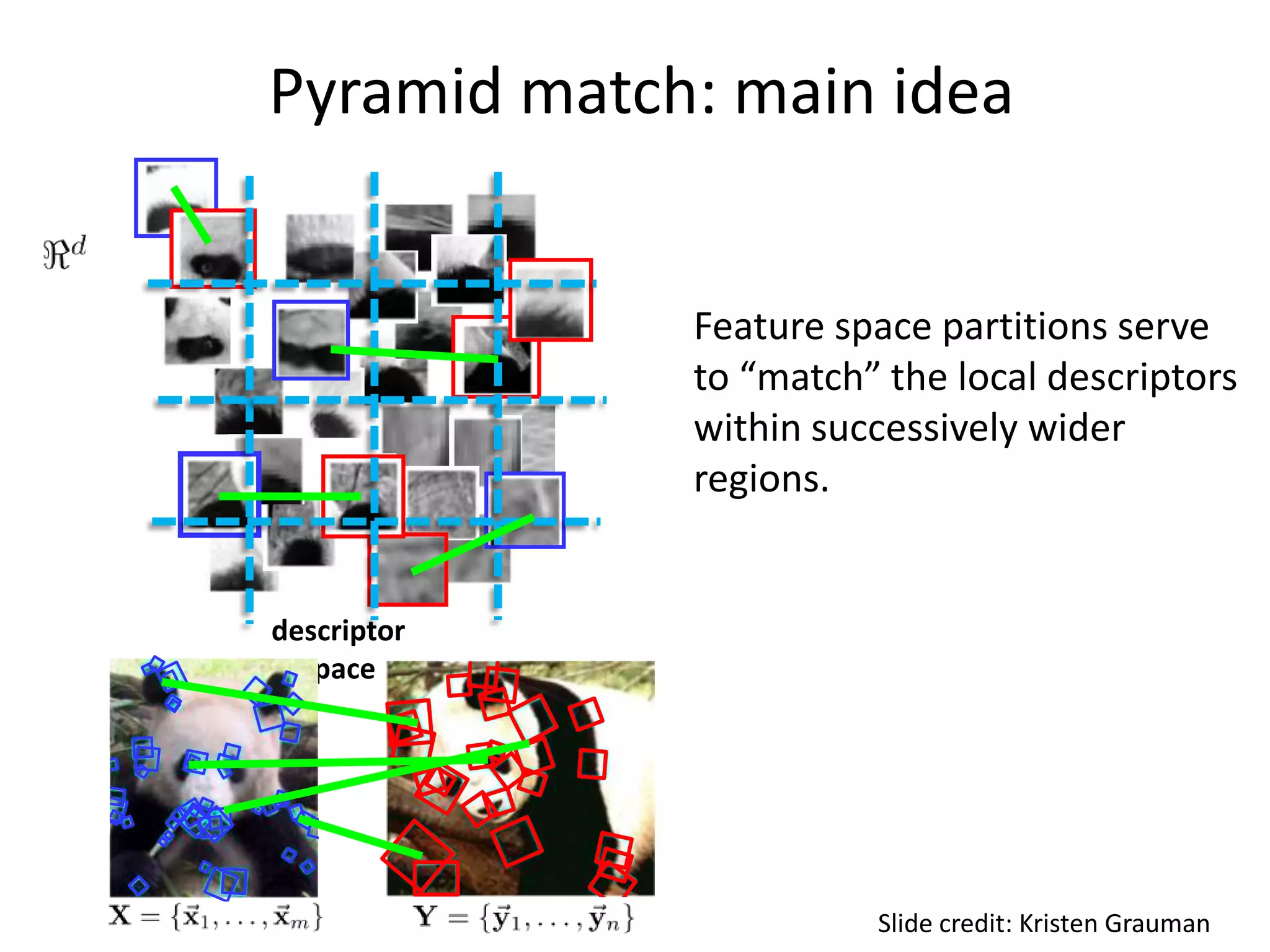
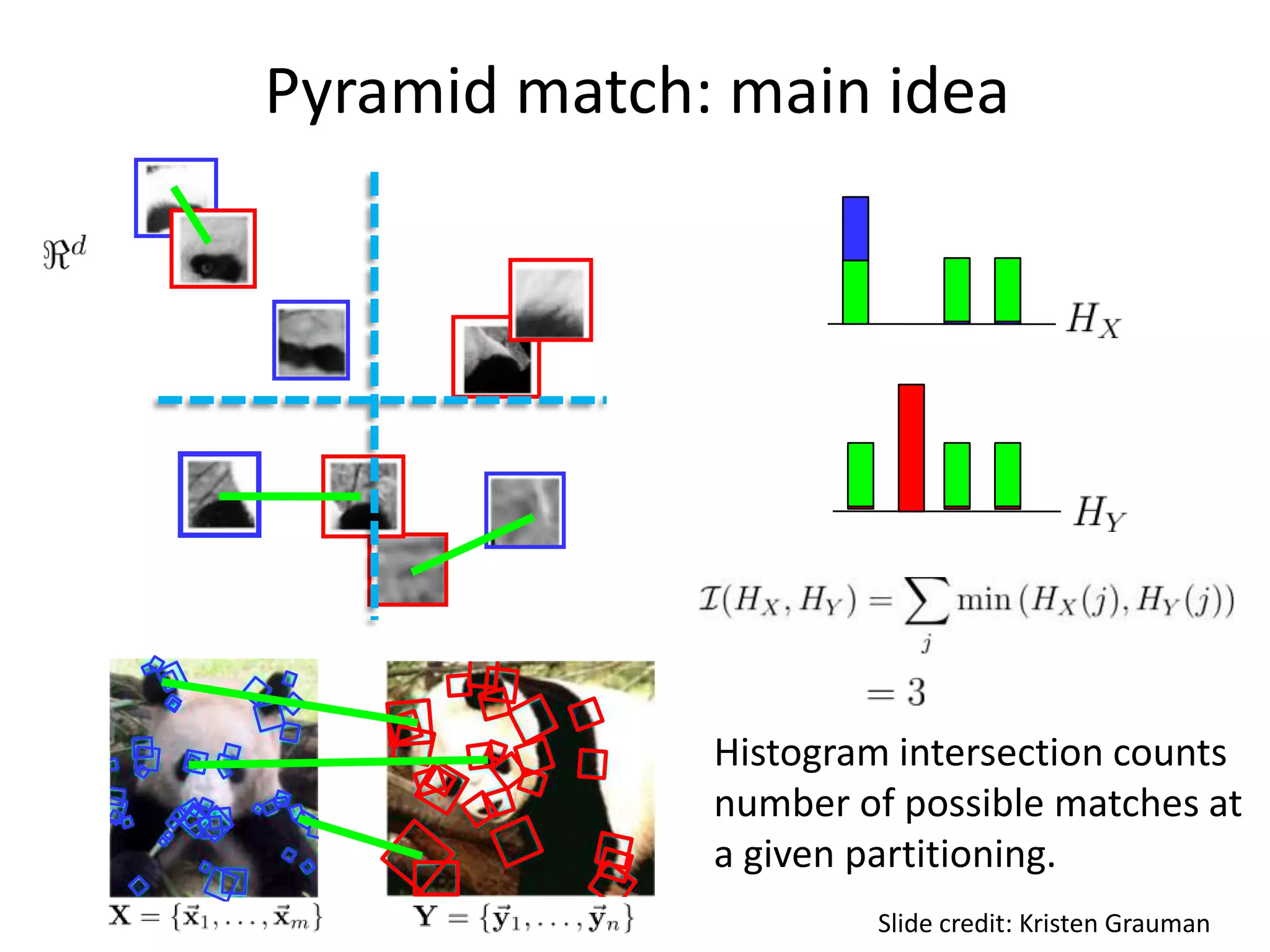
![Pyramid match kerneloptimal partial matching[Grauman & Darrell, ICCV 2005]Optimal match: O(m3)Pyramid match: O(mL)m = # featuresL = # levels in pyramidSlide credit: Kristen Grauman](https://image.slidesharecdn.com/iccv2009recognitionandlearningobjectcategories-p2c01-recognizingalargenumberofobjectclasses-110514211401-phpapp01/75/Iccv2009-recognition-and-learning-object-categories-p2-c01-recognizing-a-large-number-of-object-classes-8-2048.jpg)
![Computing the partial matchingEarth Mover’s Distance[Rubner, Tomasi, Guibas 1998]Hungarian method[Kuhn, 1955]Greedy matching …Pyramid match [Grauman and Darrell, ICCV 2005]for sets with features of dimension](https://image.slidesharecdn.com/iccv2009recognitionandlearningobjectcategories-p2c01-recognizingalargenumberofobjectclasses-110514211401-phpapp01/75/Iccv2009-recognition-and-learning-object-categories-p2-c01-recognizing-a-large-number-of-object-classes-11-2048.jpg)
![Recognition on the ETH-80ComplexityKernelMatch [Wallraven et al.]Pyramid matchRecognition accuracy (%)Testing time (s)Mean number of features per set (m)Mean number of features per set (m)Slide credit: Kristen Grauman](https://image.slidesharecdn.com/iccv2009recognitionandlearningobjectcategories-p2c01-recognizingalargenumberofobjectclasses-110514211401-phpapp01/75/Iccv2009-recognition-and-learning-object-categories-p2-c01-recognizing-a-large-number-of-object-classes-12-2048.jpg)
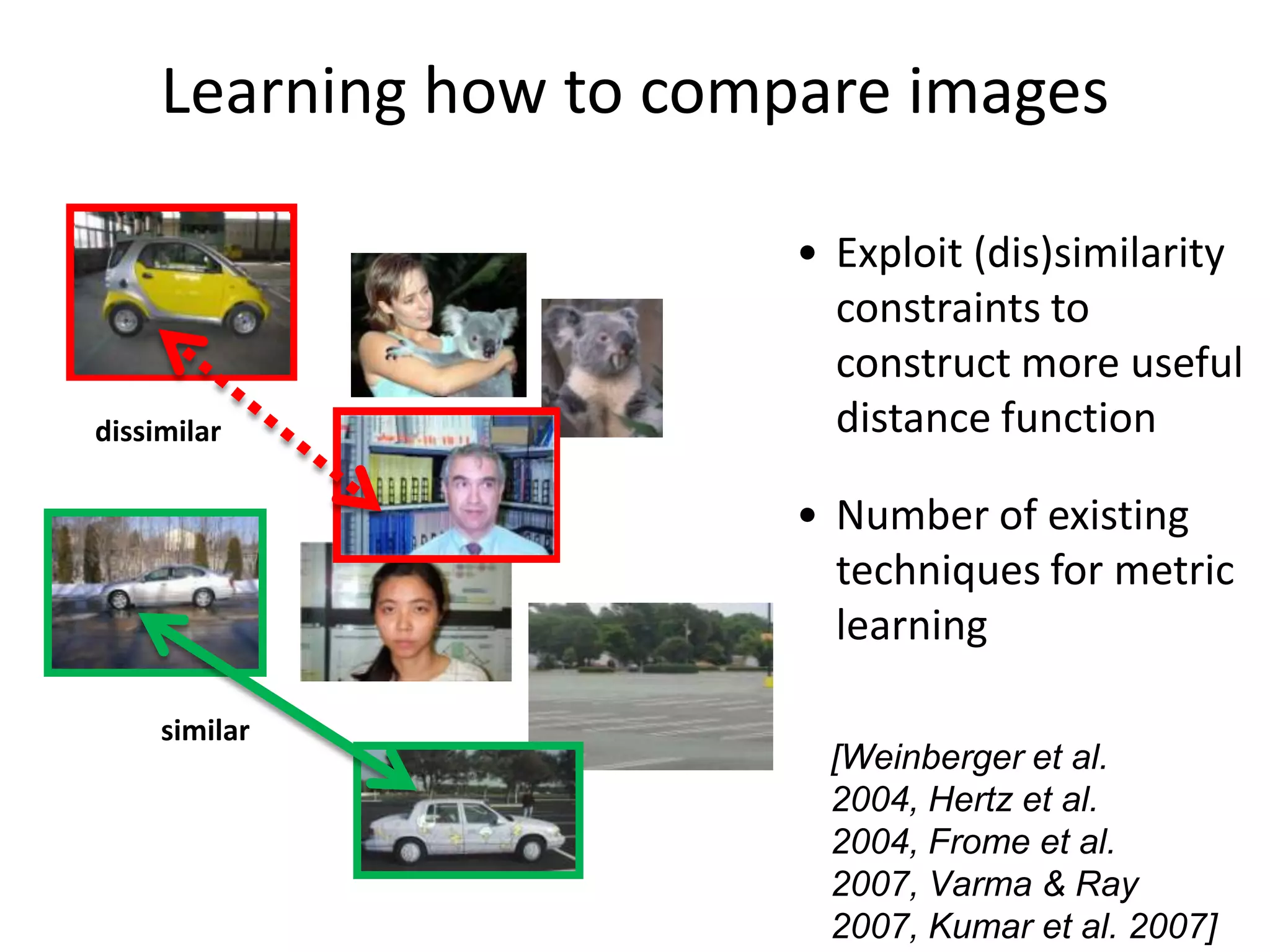
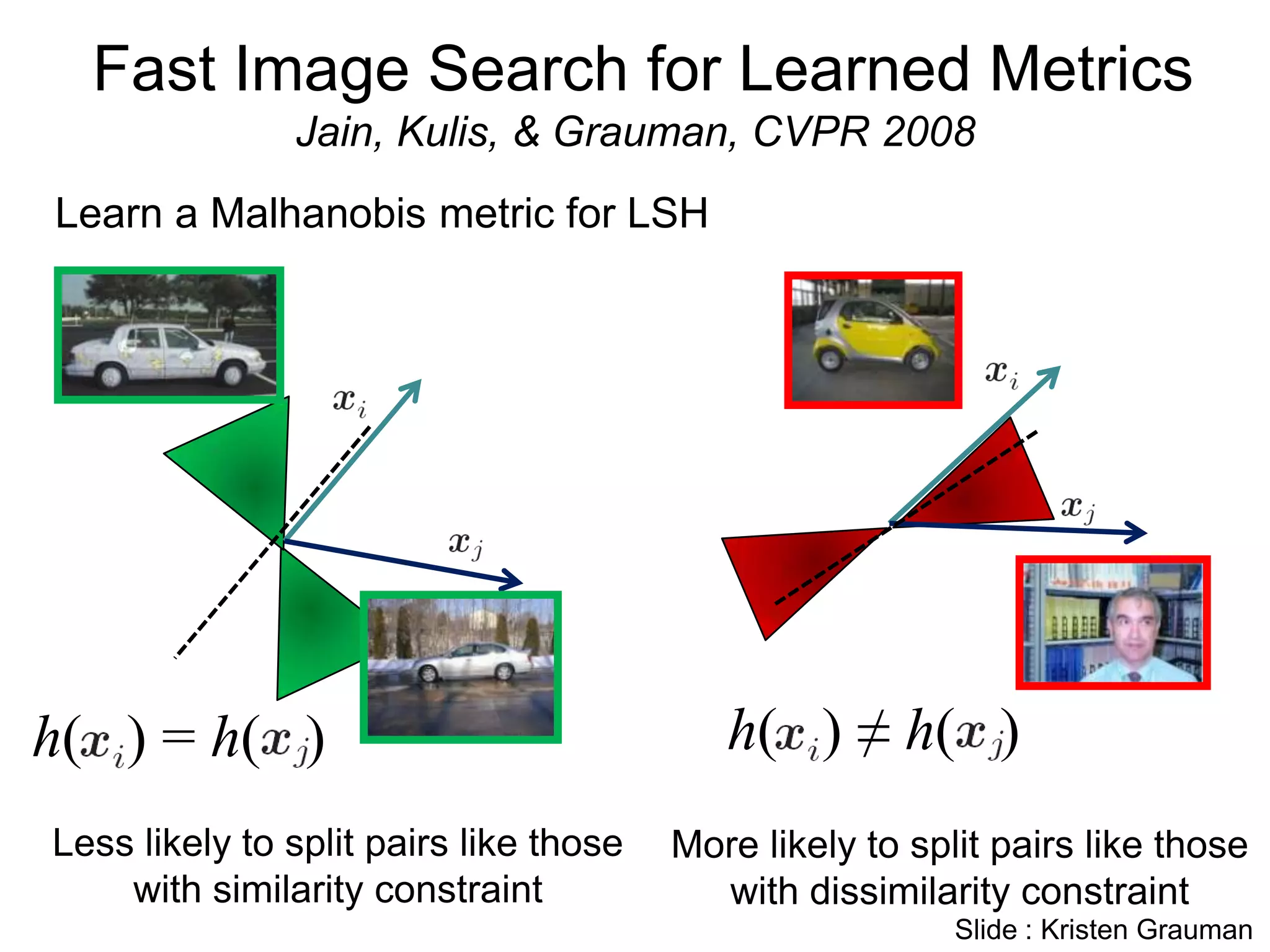
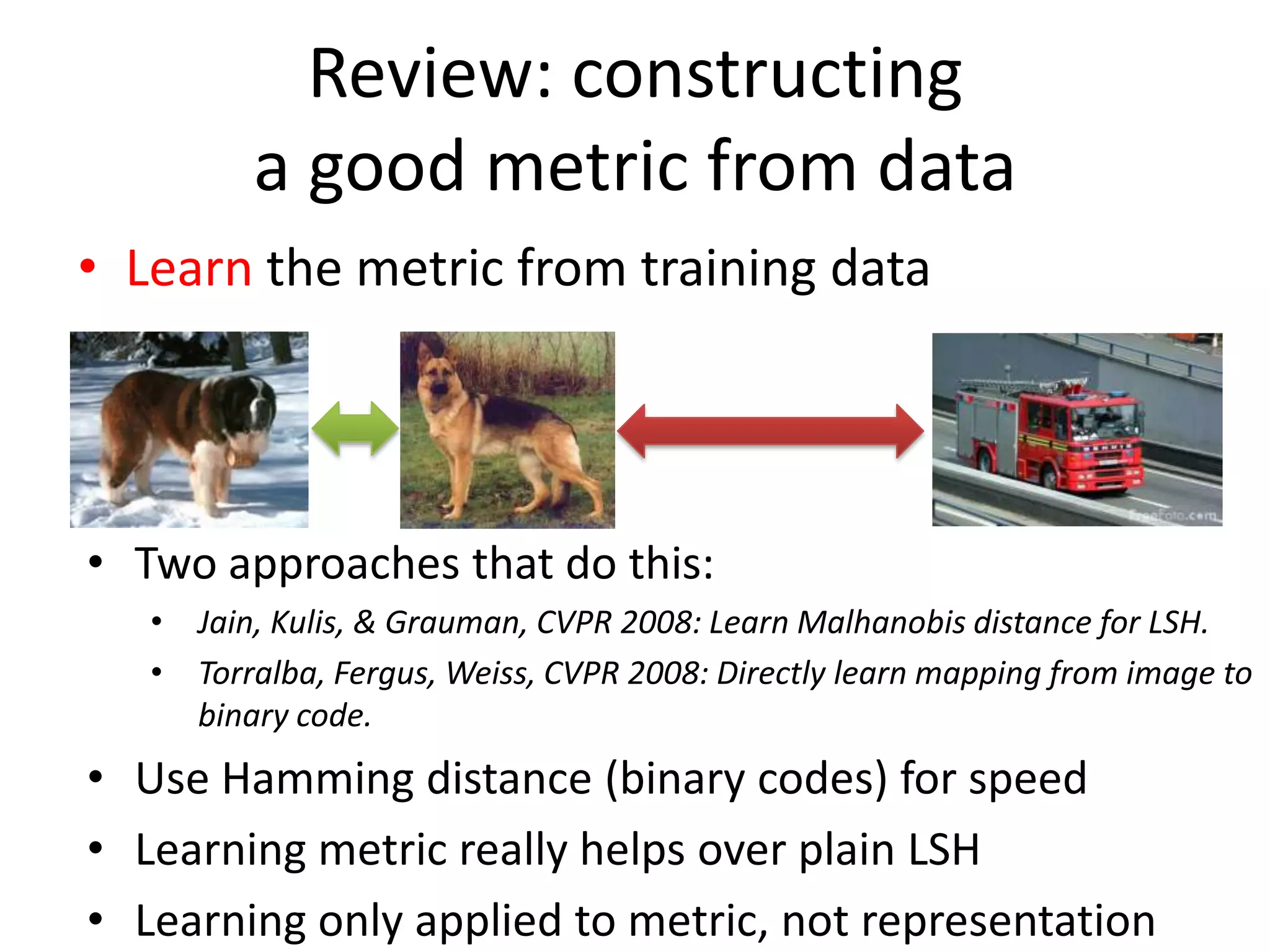
![Number of existing techniques for metric learningdissimilarsimilar[Weinberger et al. 2004, Hertz et al. 2004, Frome et al. 2007, Varma & Ray 2007, Kumar et al. 2007]](https://image.slidesharecdn.com/iccv2009recognitionandlearningobjectcategories-p2c01-recognizingalargenumberofobjectclasses-110514211401-phpapp01/75/Iccv2009-recognition-and-learning-object-categories-p2-c01-recognizing-a-large-number-of-object-classes-17-2048.jpg)


















![[DL輪読会]PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/pvrcnn-200311050009-thumbnail.jpg?width=640&height=640&fit=bounds)