Download as PDF, PPTX
![Previous Approach
Early approaches : Graph Cut, GrabCut, Random Walk, Random
Walk with Restart, Geodesic [1,2,3,4,5]
Using MRF optimization to extract region of interest
Determine the region by comparing the correspondence between labeled and
unlabeled pixels
[1] Y. Y. Boykov et al. Interactive graph cuts for optimal boundary & region segmentation of objects in nd images. In ICCV, 2001.
[2] C. Rother et al. Grabcut: Interactive foreground extraction using iterated graph cuts. In ToG. 2004.
[3] L. Grady. Random walks for image segmentation. In PAMI. 2006.
[4] T. H. Kim et al. Generative image segmentation using random walks with restart. In ECCV. 2008.
[5] V. Gulshan et al. Geodesic star convexity for interactive image segmentation. In CVPR. IEEE, 2010.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-7-2048.jpg)
![Previous Approach
Recent approaches : Deep Learning [1,2] …
Fine-tuning semantic segmentation network (FCN [3]) for interactive
segmentation task
End-to-end training by concatenating seed point and image
Significant performance improvements compared to classical
techniques
[1] N. Xu et al. Deep interactive object selection. In CVPR. 2016.
[2] J. Hao Liew et al. Regional interactive image segmentation networks. In ICCV. 2017.
[3] J. Long et al. Fully convolutional networks for semantic segmentation. In CVPR. 2015](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-8-2048.jpg)
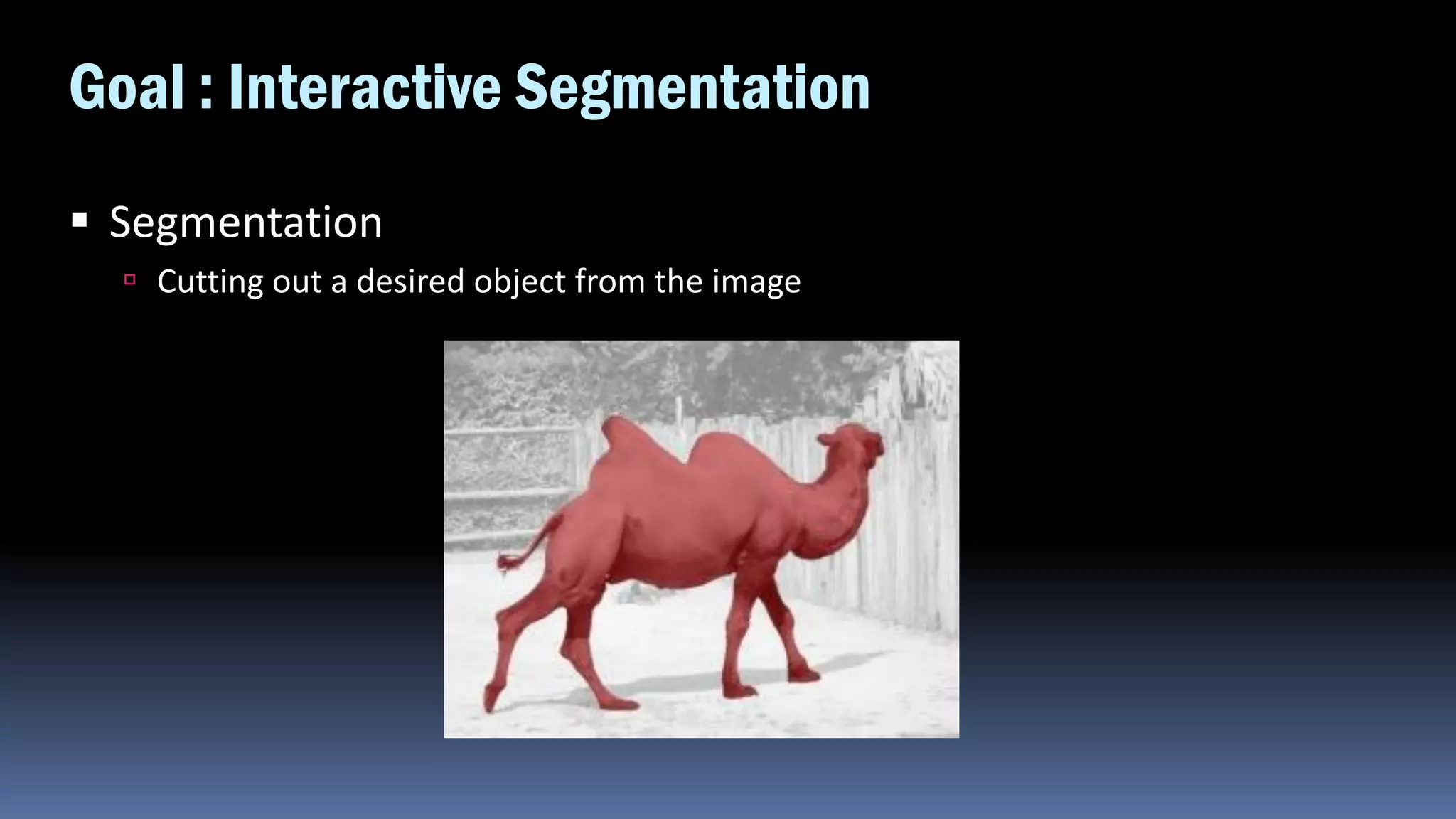
![Challenges
Minimizing user interaction
Main metric of segmentation : Accuracy %, Click #
Reducing the input burden of the user
Deep learning frameworks still require a large number of clicks
Segmentation Pascal Grabcut Berkeley
MSCOCO
(seen)
MSCOCO
(unseen)
Graph Cut [1] 15.06 11.10 14.33 18.67 17.80
Random Walk [2] 11.37 12.30 14.02 13.91 11.53
Geodesic [3] 11.73 8.38 12.57 14.37 12.45
iFCN [4] 6.88 6.04 8.65 8.31 7.82
RIS-Net [5] 5.12 5.00 6.03 5.98 6.44
[1] Y. Y. Boykov et al. Interactive graph cuts for optimal boundary & region segmentation of objects in nd images. In ICCV, 2001.
[2] L. Grady. Random walks for image segmentation. In PAMI. 2006.
[3] V. Gulshan et al. Geodesic star convexity for interactive image segmentation. In CVPR. IEEE, 2010.
[4] N. Xu et al. Deep interactive object selection. In CVPR. 2016.
[5] J. Hao Liew et al. Regional interactive image segmentation networks. In ICCV. 2017.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-9-2048.jpg)
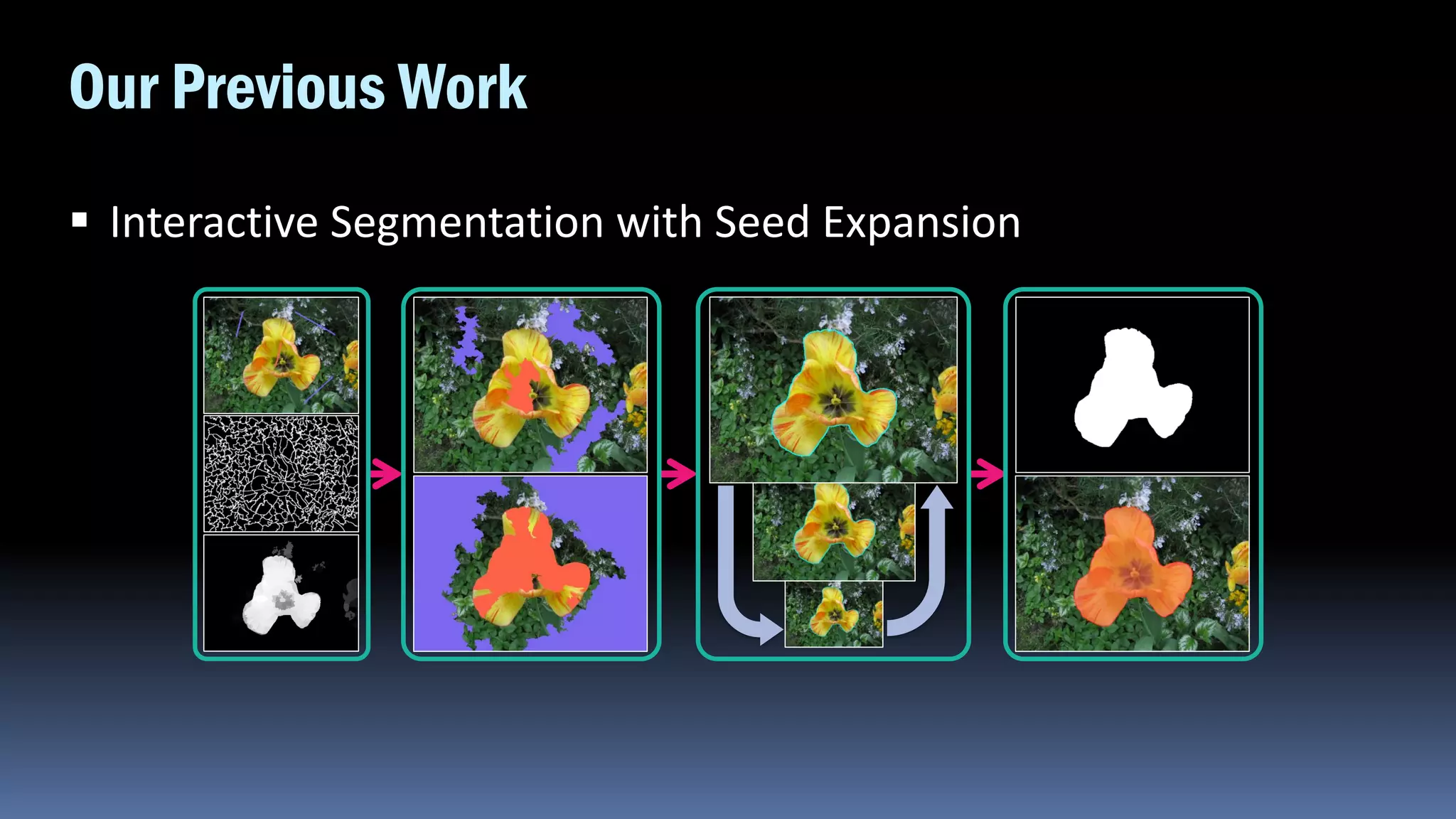
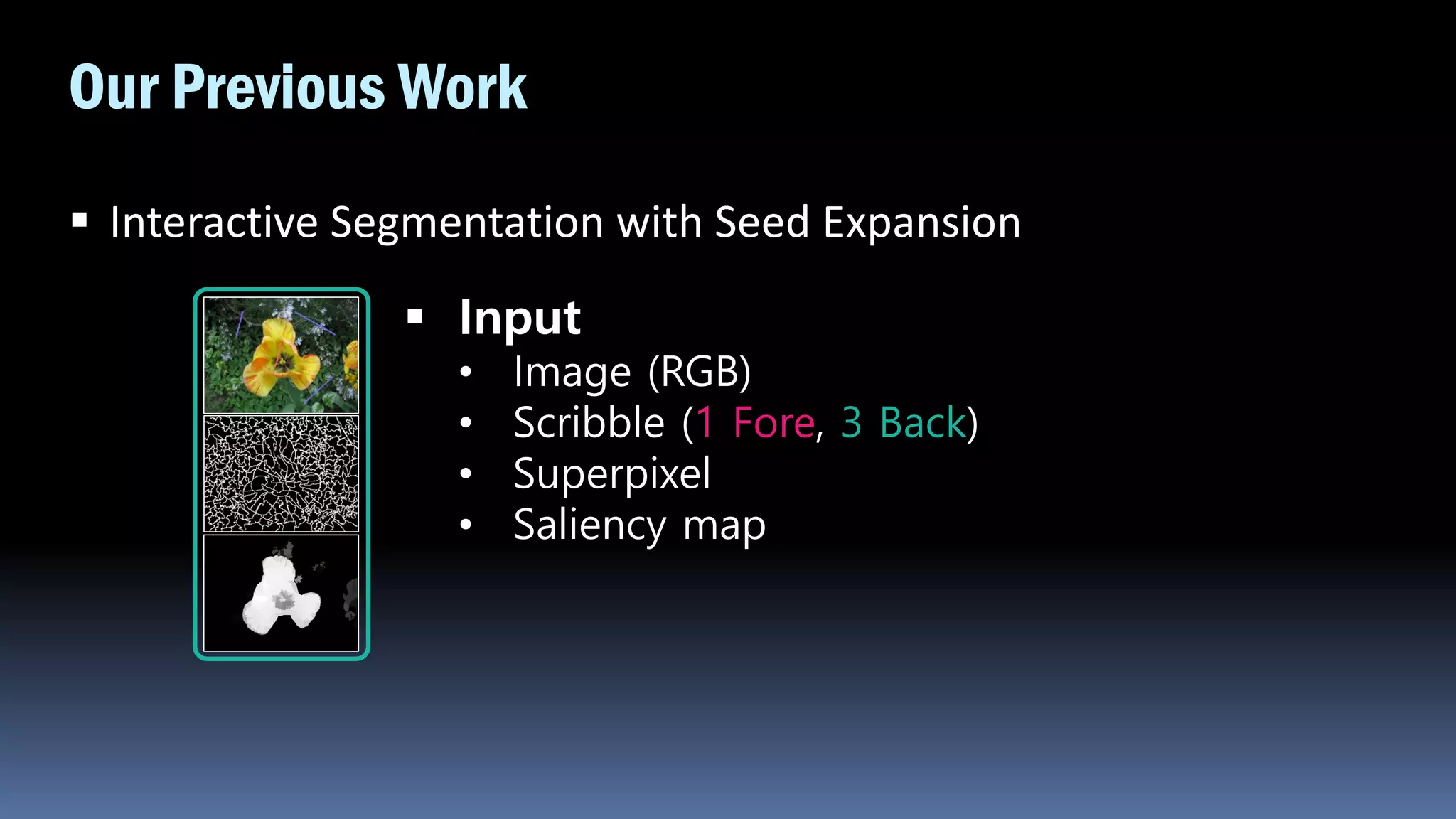
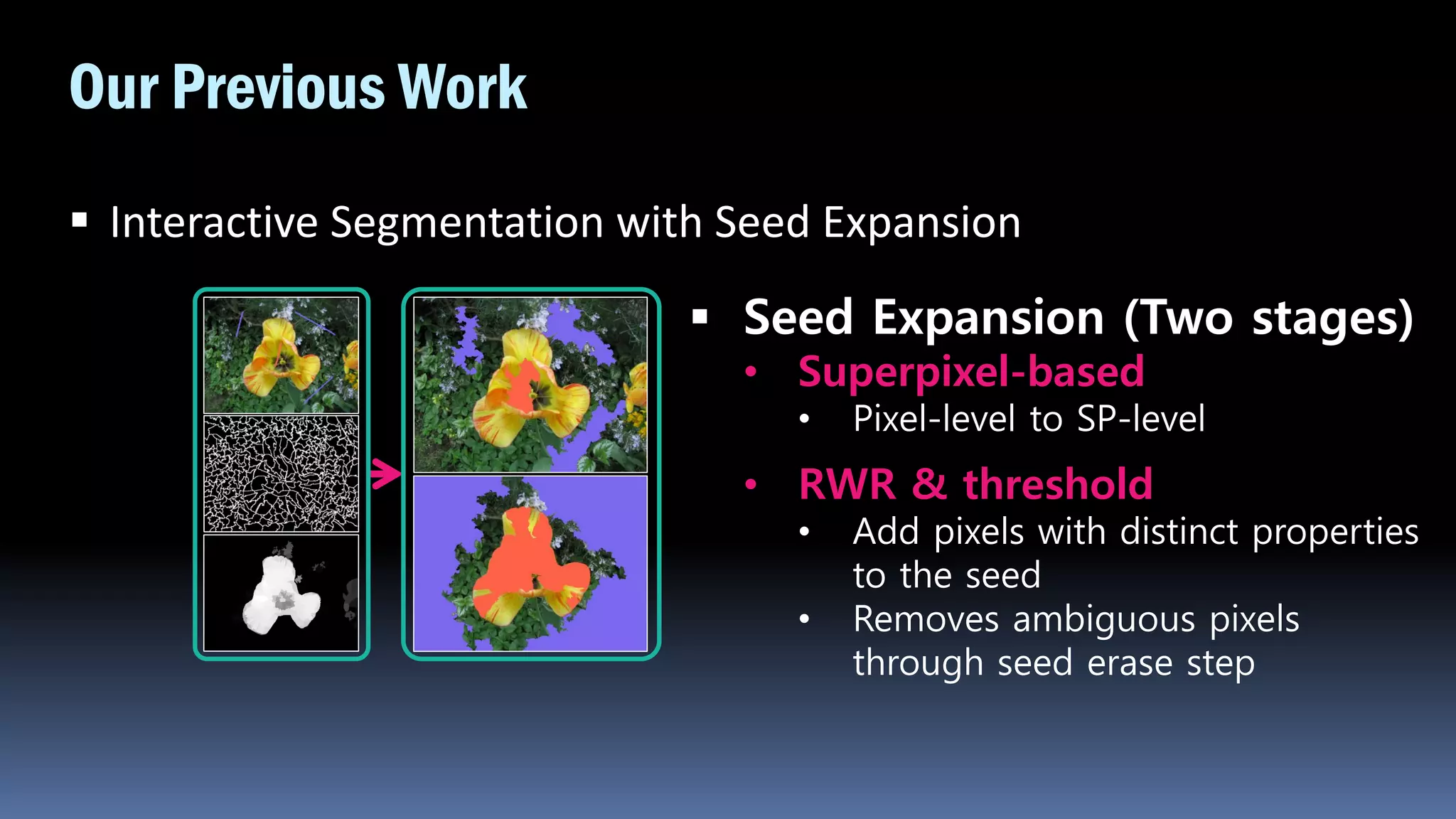
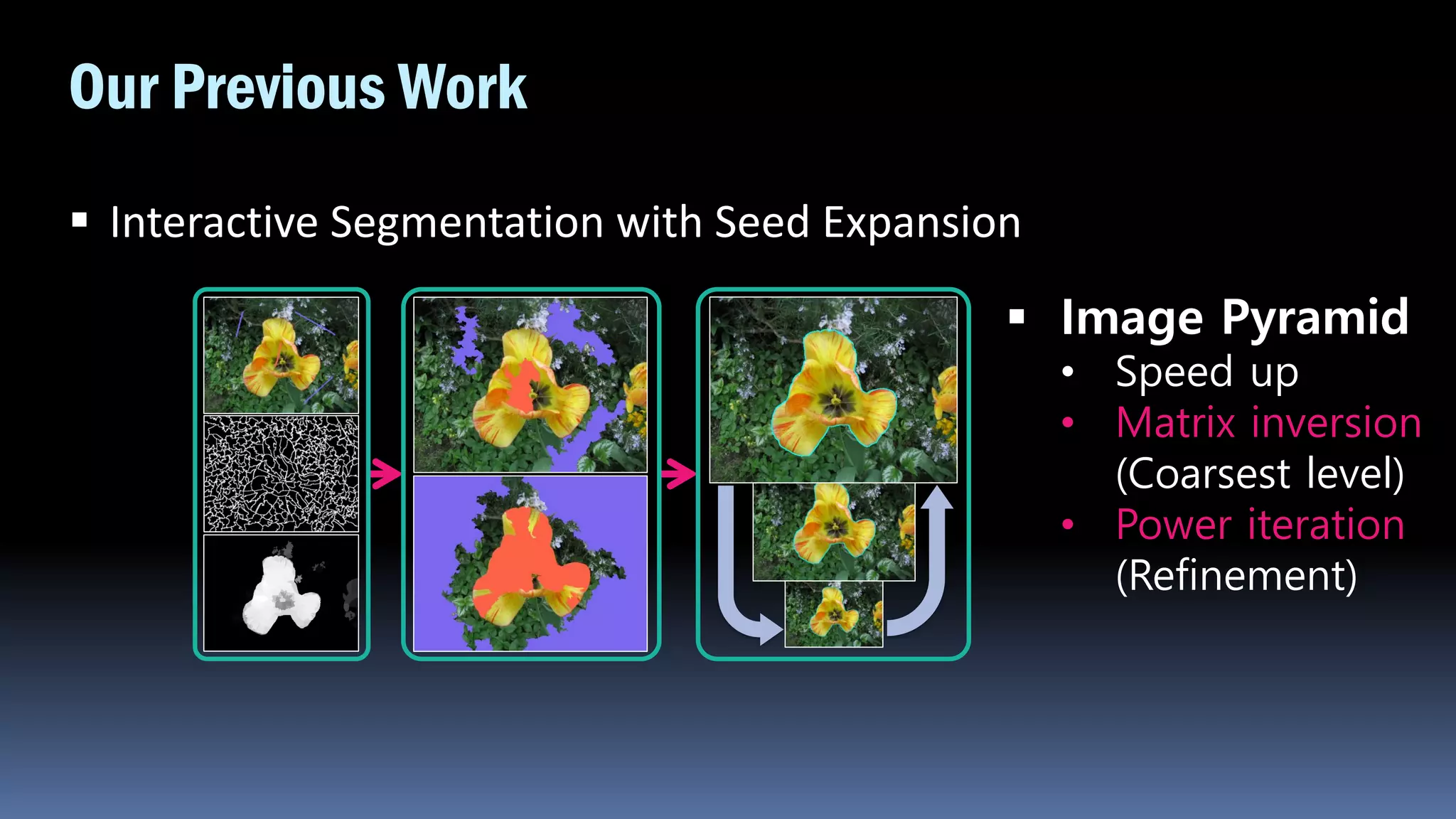
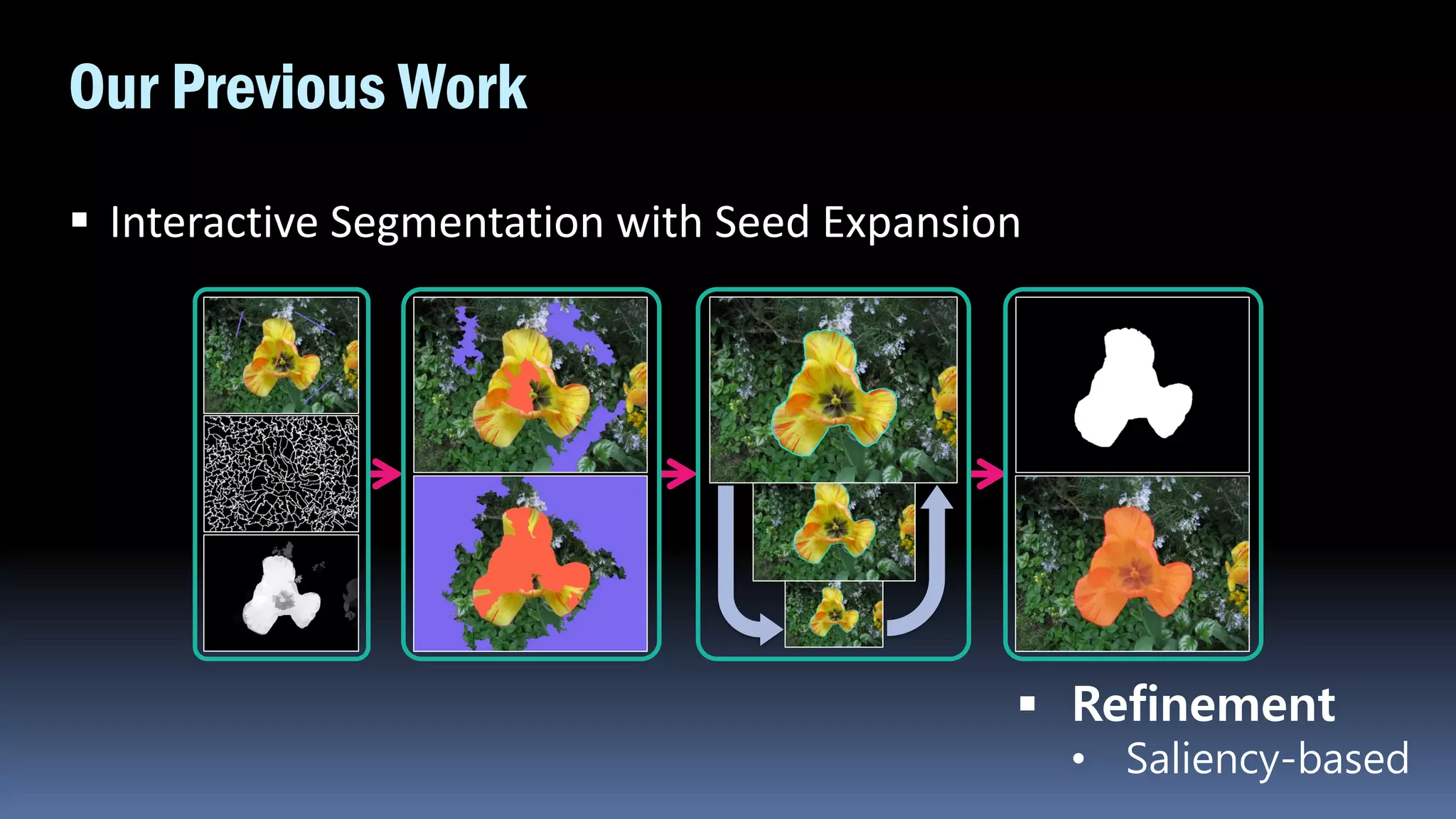
![Our Previous Work
Results
Limitation
Heuristic approach
Insufficient accuracy
Method F-score (%)
RWR [1] 74.48
Ours 80.32
[1] T. H. Kim et al. Generative image segmentation using random walks with restart. In ECCV. 2008.
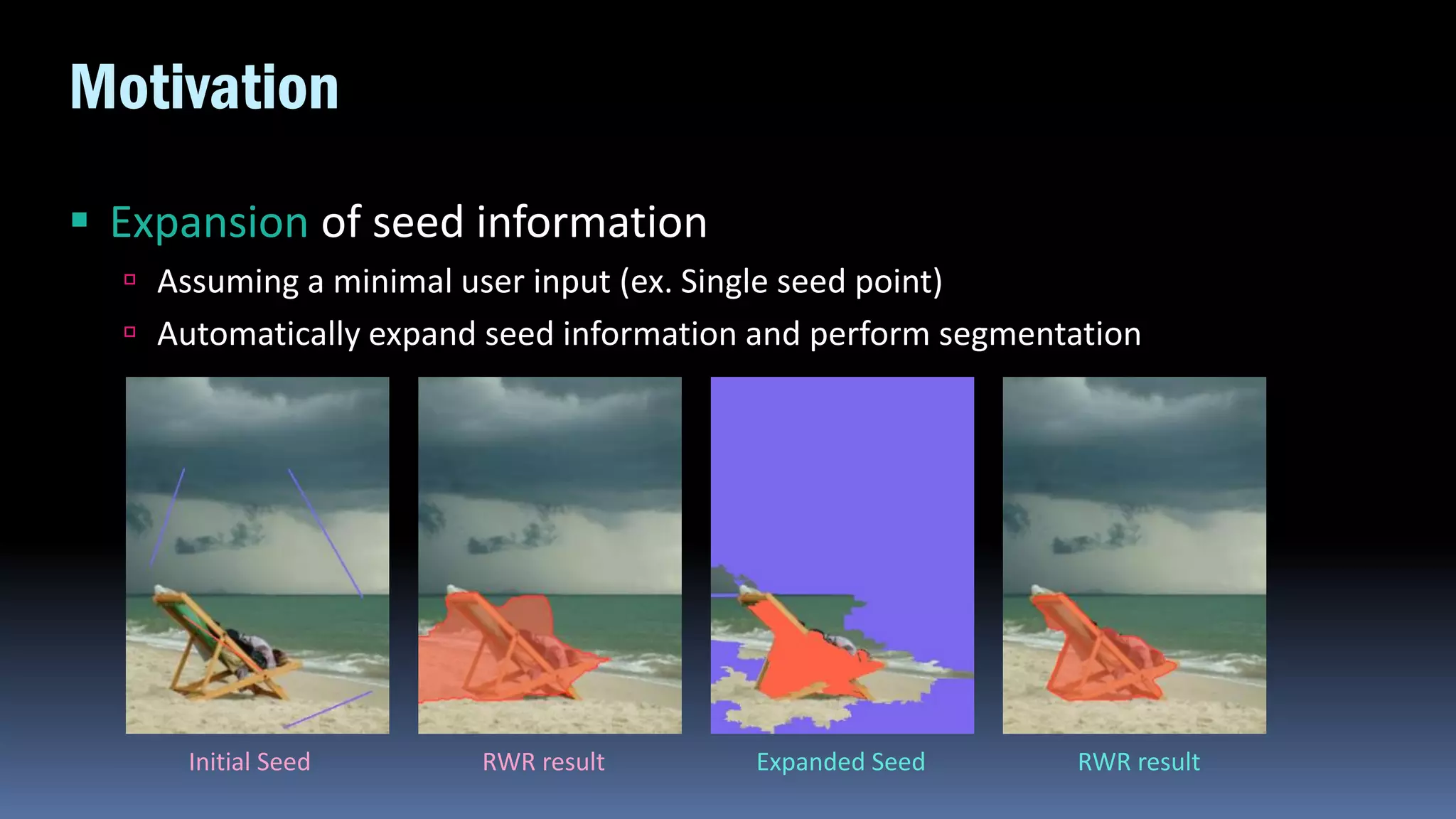
Image &
Scribble
RWR
Results
Expanded
Seed
Our
Results](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-18-2048.jpg)
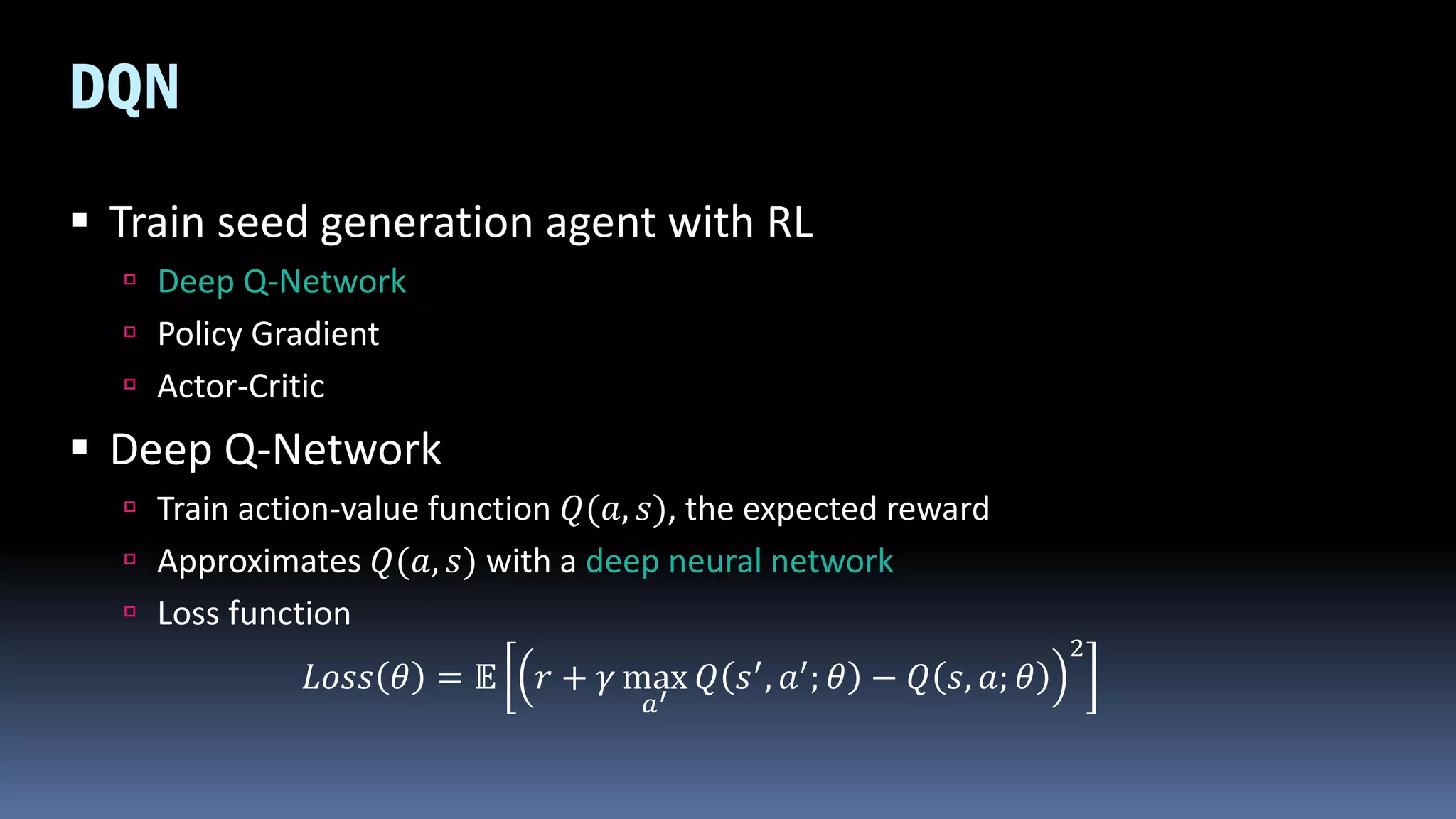
![DQN
DQN architecture
Basic architecture from [1]
Double DQN [2]
Dueling DQN [3]
[1] V. Mnih et al. Human-level control through deep reinforcement learning. In Nature. 2015.
[2] H. Van Hasselt et al. Deep reinforcement learning with double q-learning. In AAAI, 2016.
[3] Z. Wang et al. Dueling network architectures for deep reinforcement learning. In ICML, 2016.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-37-2048.jpg)
![Experiments
MSRA10K dataset
Saliency task
10,000 images (9,000 train, 1,000 test)
Initial seed generated from GT mask
1 foreground, 1 background seed point
Our model
Segmentation module : Random Walk [1]
Stop after 10 seed generation
[1] L. Grady. Random walks for image segmentation. In PAMI. 2006.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-38-2048.jpg)
![MSRA10K
Quantitative Results
5 random seed sets
Intersection-over-Union score comparison
Method Set 1 Set 2 Set 3 Set 4 Set 5 Mean
RW [1] 39.59 39.65 39.71 39.77 39.89 39.72
Ours 60.70 60.12 61.28 61.87 60.90 60.97
[1] L. Grady. Random walks for image segmentation. In PAMI. 2006.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-39-2048.jpg)
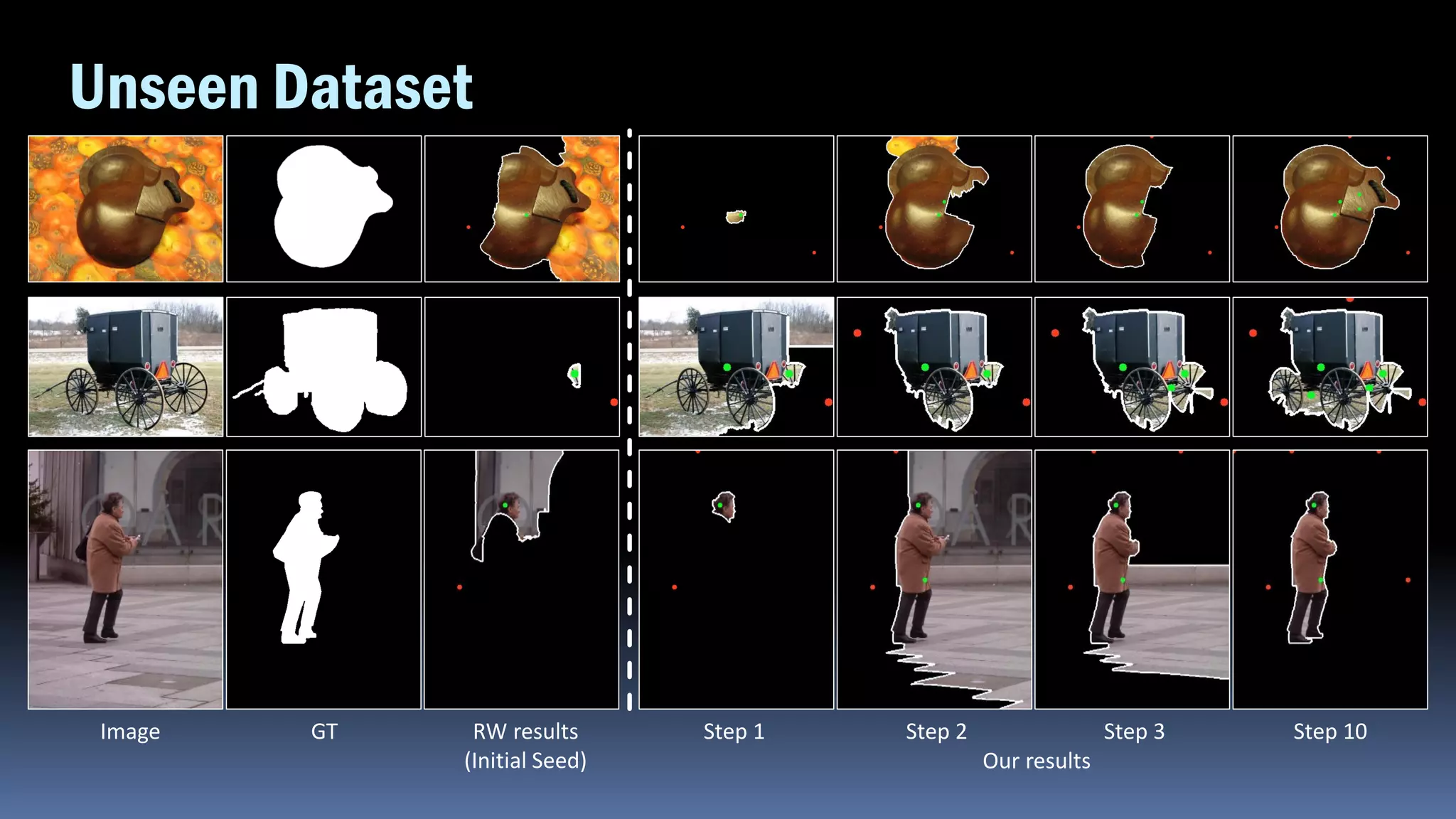
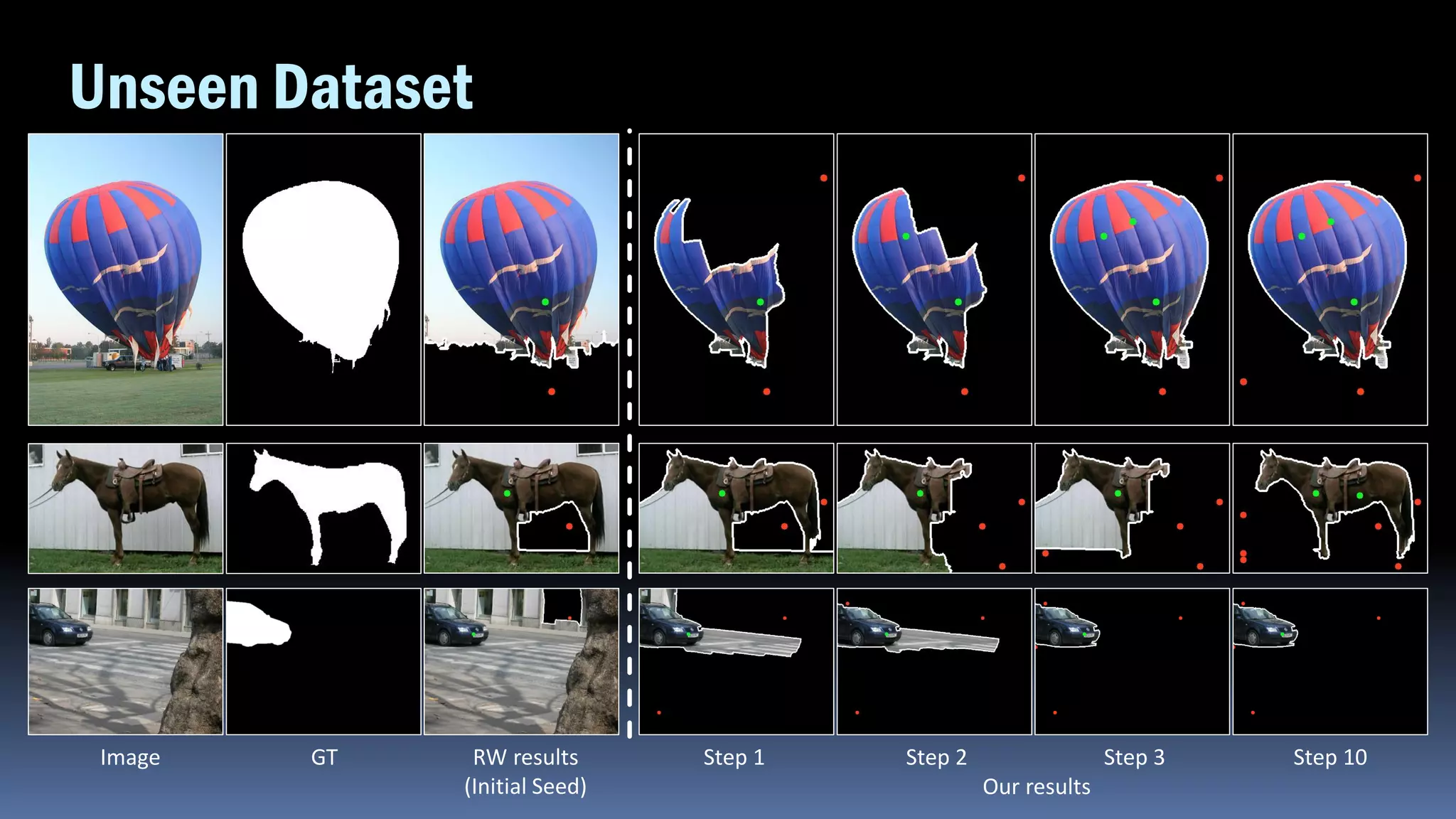
![MSRA10K
Image GT RW results [1]
(Initial Seed)
Step 1 Step 2 Step 3 Step 10
Our results
[1] L. Grady. Random walks for image segmentation. In PAMI. 2006.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-40-2048.jpg)
![MSRA10K
Comparison with supervised methods
Same condition (Network configuration, Scratch)
Directly output segmentation mask
Input type : image only (FCN), with seed (iFCN)
Method FCN [1] iFCN [2] Ours
IoU 37.20 44.60 60.97
[1] J. Long et al. Fully convolutional networks for semantic segmentation. In CVPR. 2015
[2] N. Xu et al. Deep interactive object selection. In CVPR. 2016.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-41-2048.jpg)
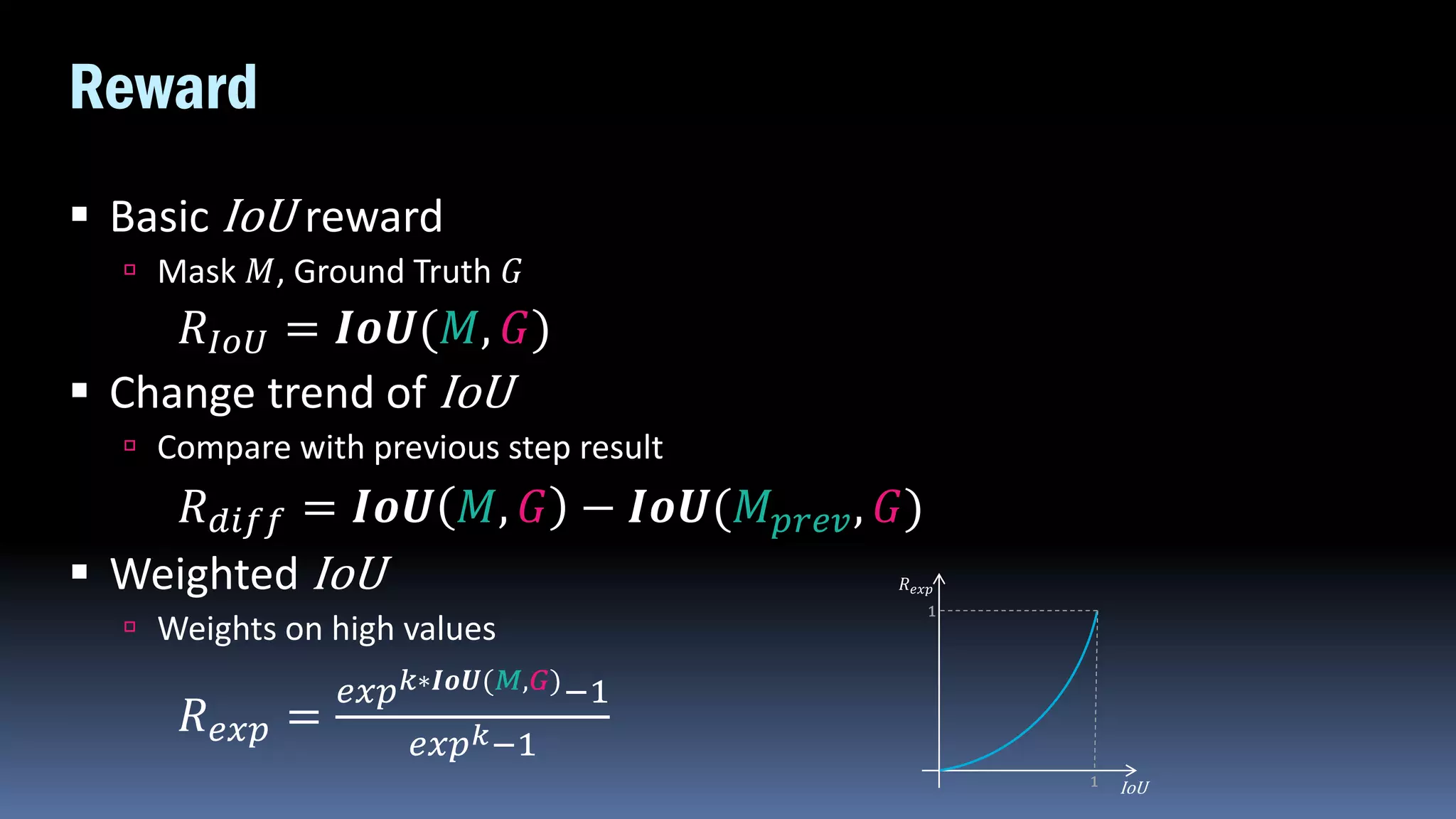
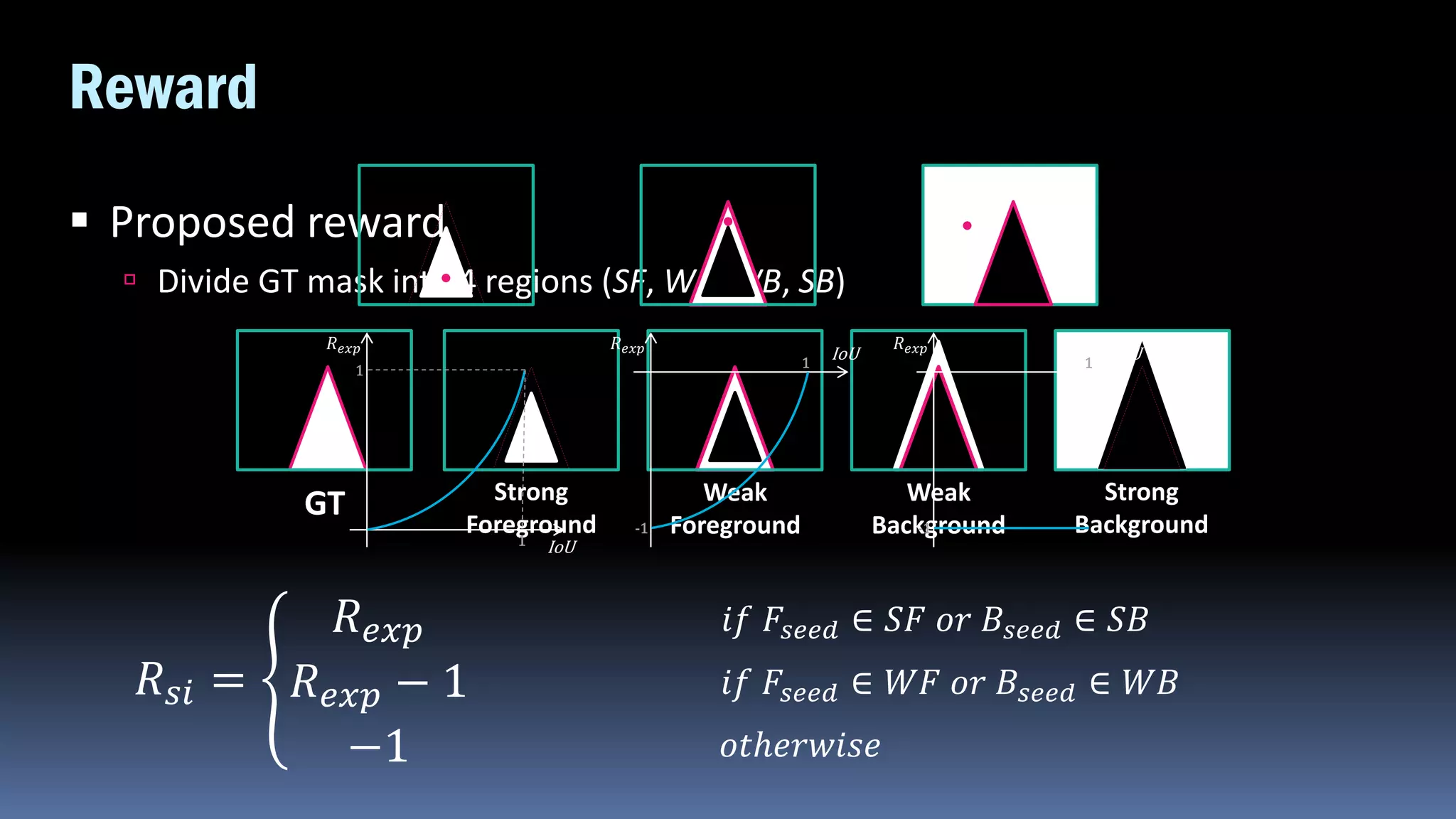
![Ablation Study
Reward function
Method RW [1] 𝑹 𝑰𝒐𝑼 𝑹 𝒅𝒊𝒇𝒇 𝑹 𝒔𝒊
IoU 39.72 42.55 44.45 60.97
𝑅𝐼𝑜𝑈 𝑅 𝑑𝑖𝑓𝑓 𝑅 𝑠𝑖
[1] L. Grady. Random walks for image segmentation. In PAMI. 2006.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-42-2048.jpg)
![Ablation Study
Other segmentation module
Method GC [1] Ours (GC) GSC [2] Ours (GSC)
IoU 38.44 52.10 58.34 63.48
RWR [3] Ours (RWR)
35.71 53.04
Image GT Initial Ours
GCGSCRWR
[1] C. Rother et al. Grabcut: Interactive foreground extraction using iterated graph cuts. In ToG. 2004.
[2] V. Gulshan et al. Geodesic star convexity for interactive image segmentation. In CVPR. IEEE, 2010.
[3] T. H. Kim et al. Generative image segmentation using random walks with restart. In ECCV. 2008.](https://image.slidesharecdn.com/seednetautomaticseedgenerationwithdeepreinforcementlearningforrobustinteractivesegmentation-181119055545/75/Seed-net-automatic-seed-generation-with-deep-reinforcement-learning-for-robust-interactive-segmentation-43-2048.jpg)


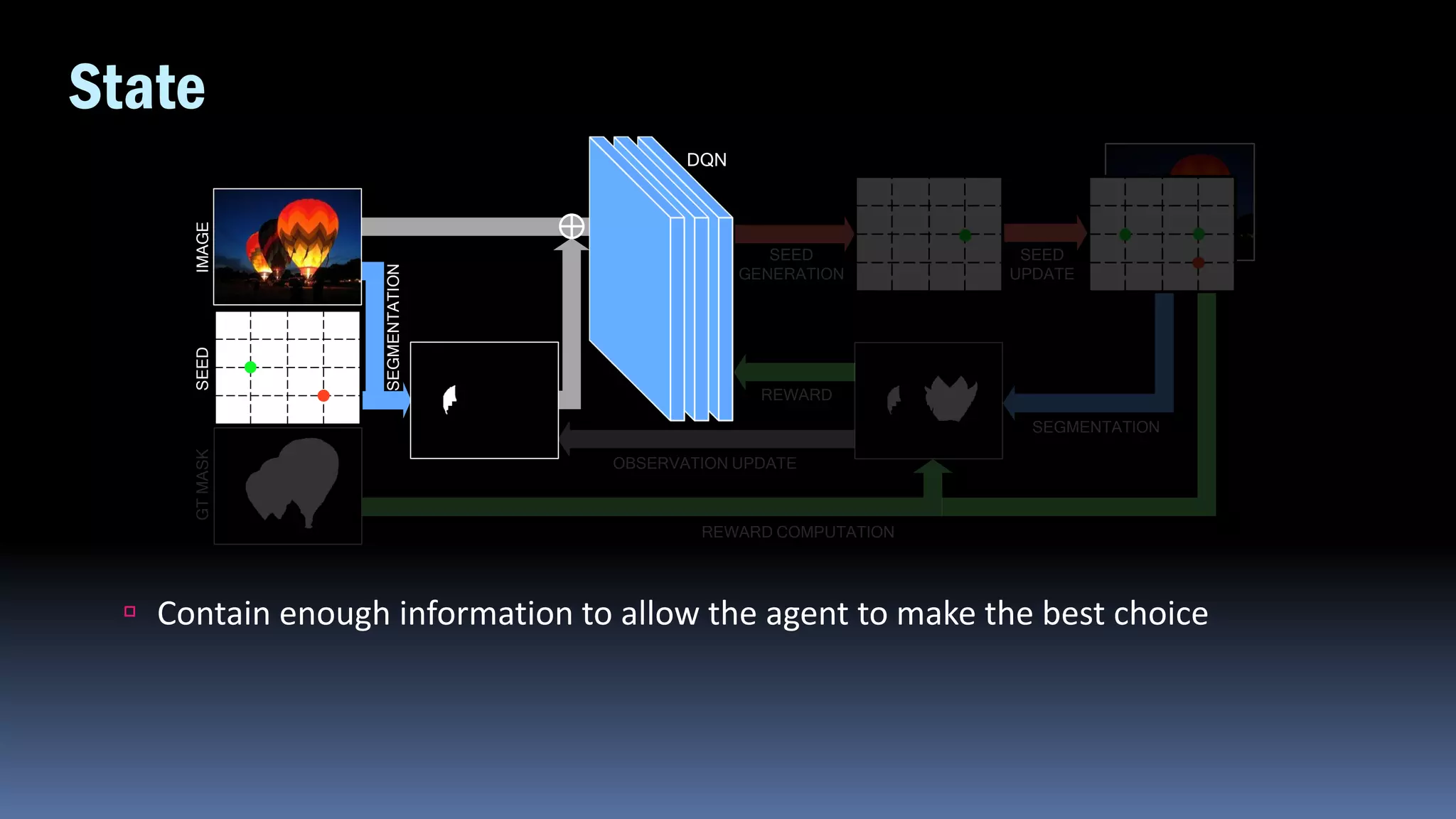
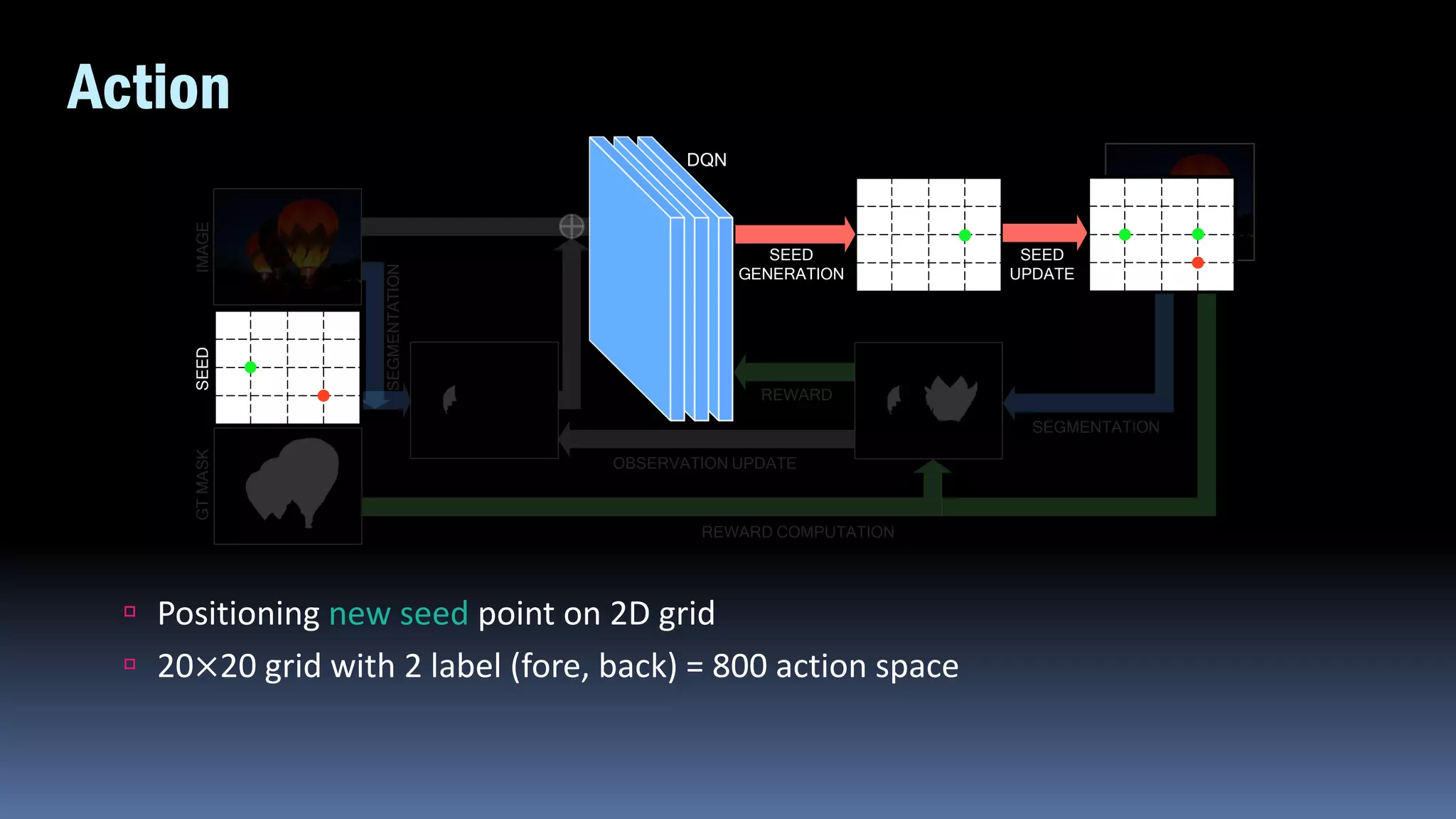
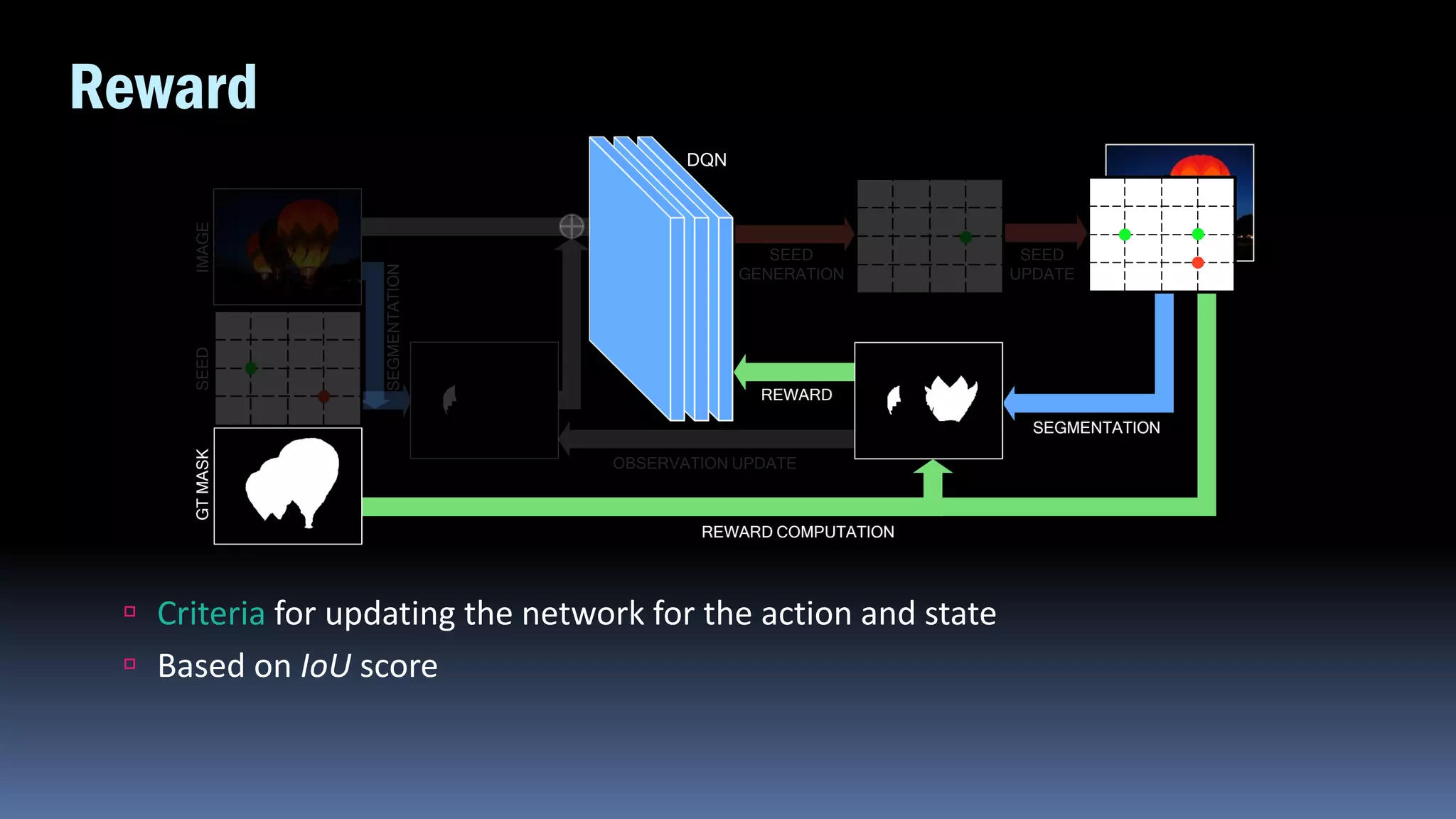
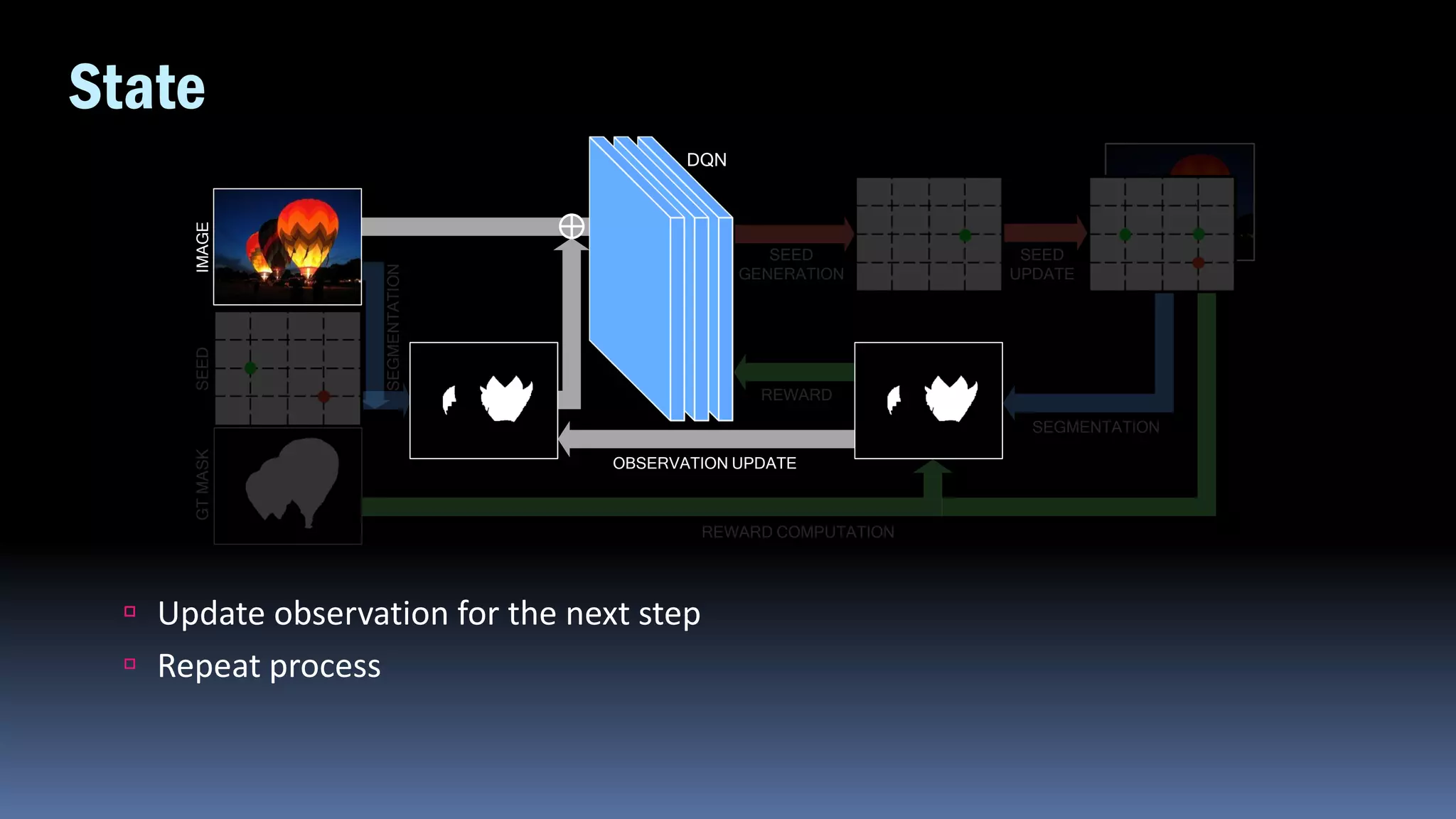
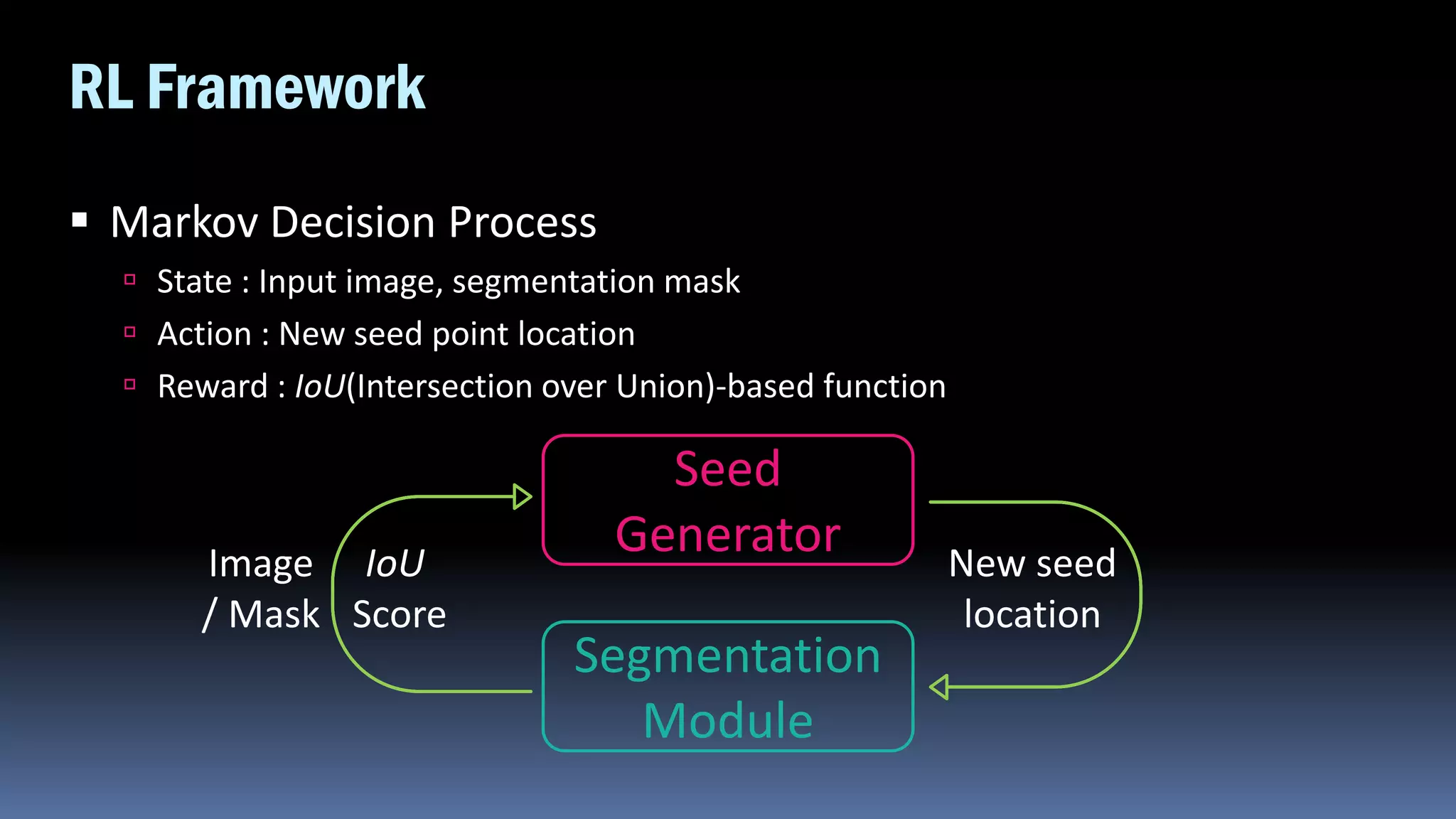
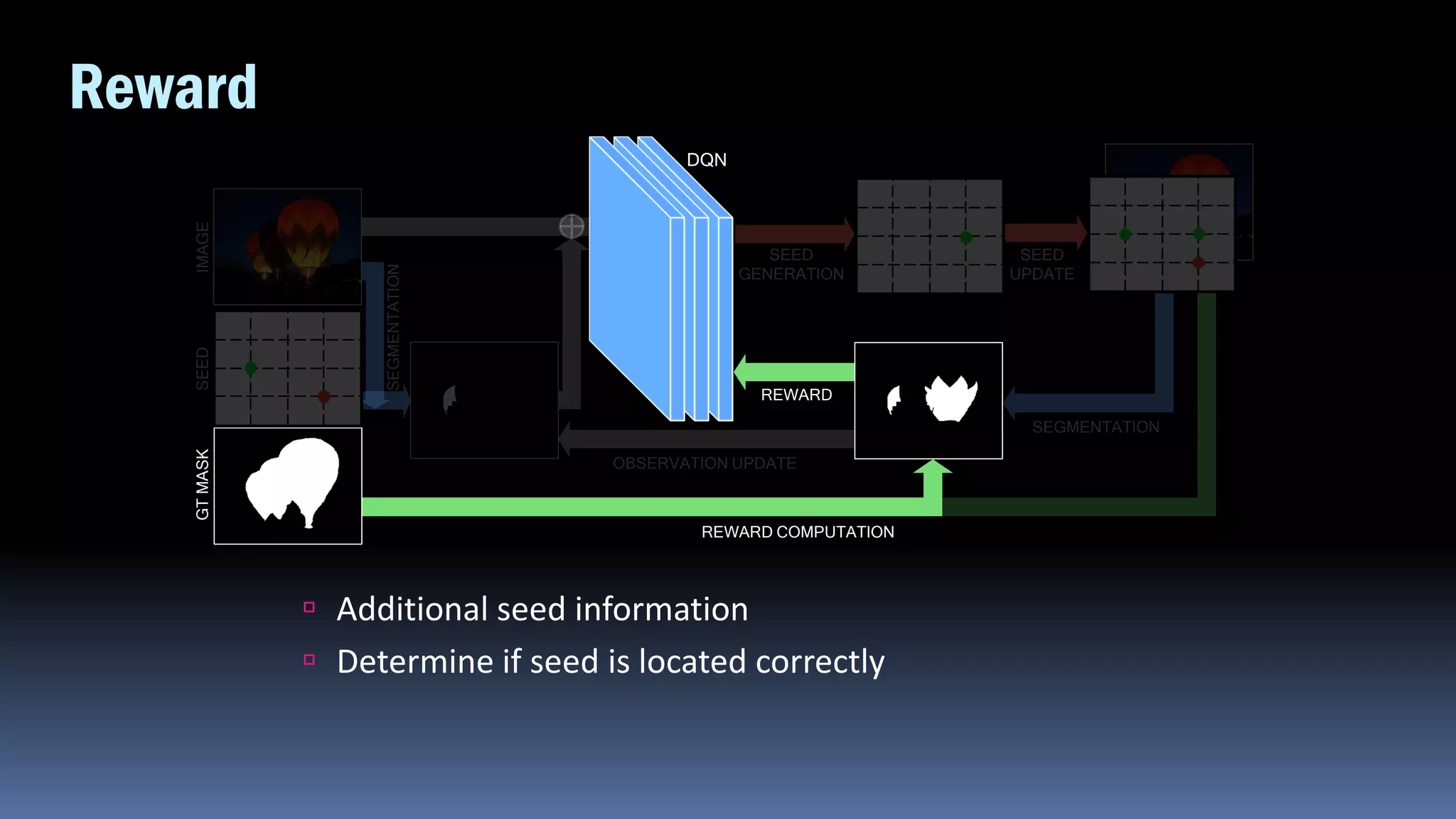
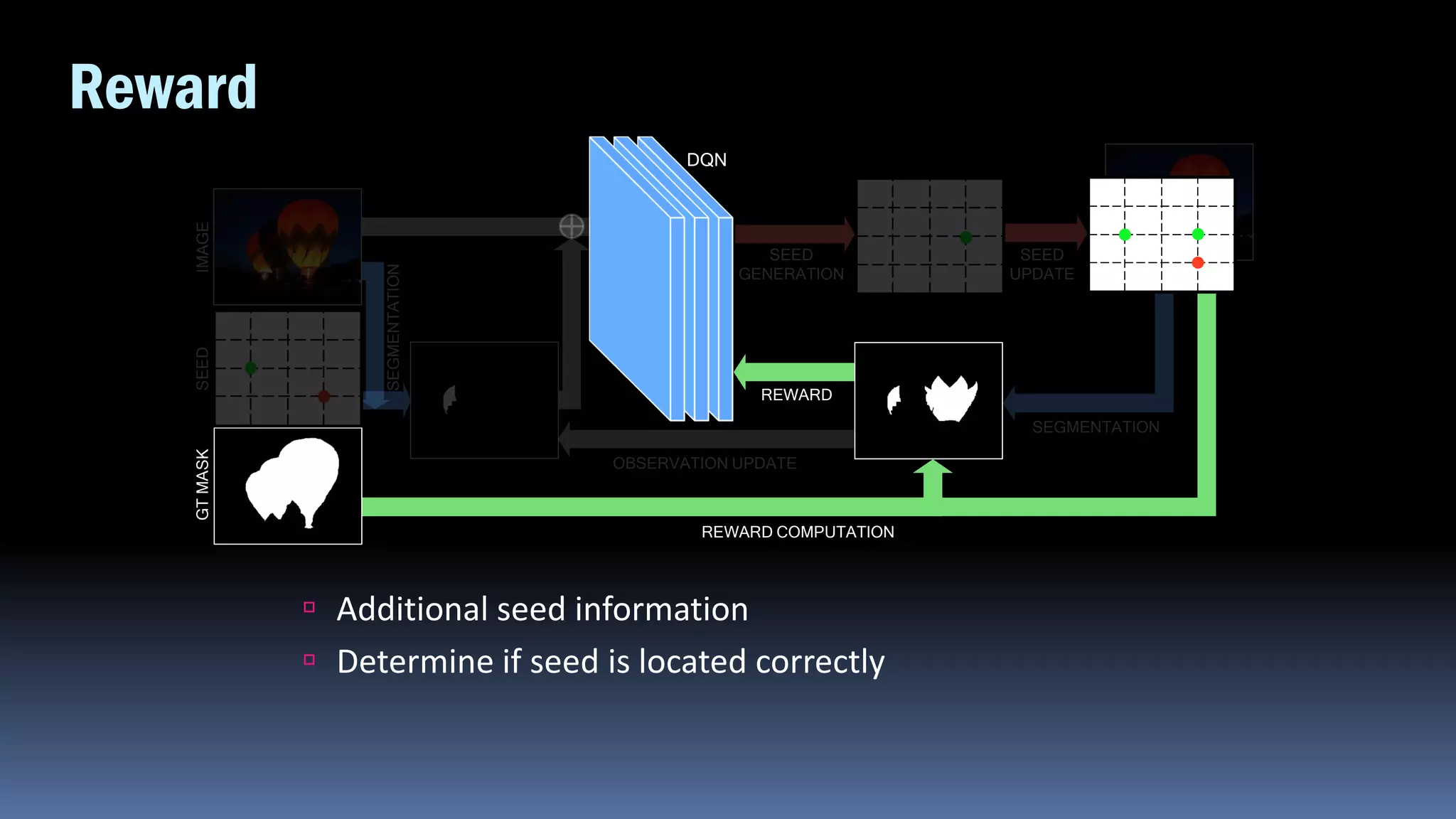
The document presents a novel automatic seed generation system for interactive image segmentation using deep reinforcement learning, aimed at enhancing segmentation accuracy with minimal user input. It critiques existing methods for relying heavily on user interaction and proposes a model that automatically expands seed information to reduce this burden. The results indicate that the proposed system significantly outperforms traditional techniques through an end-to-end training approach.