Download to read offline

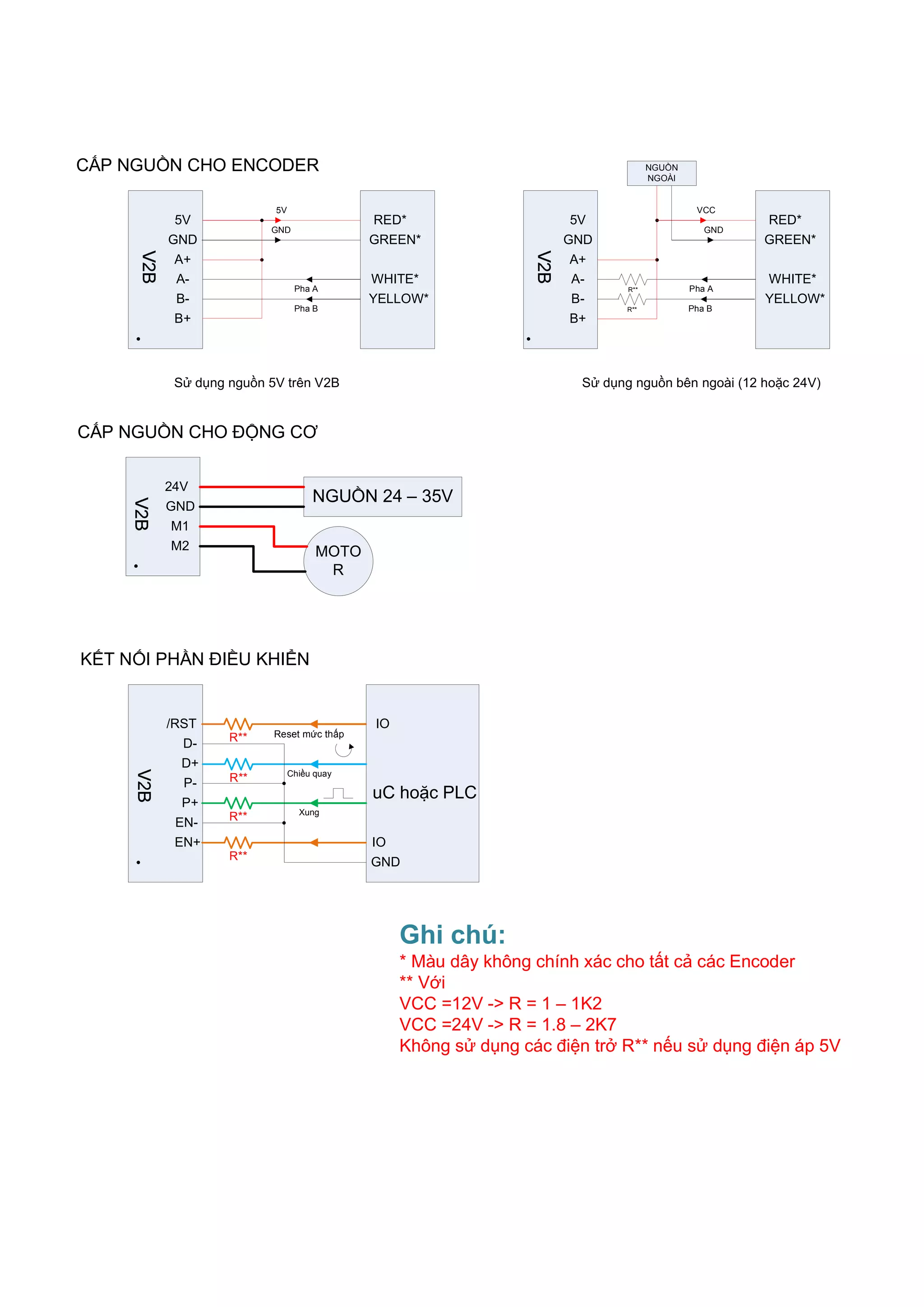

Tài liệu cung cấp hướng dẫn kết nối nguồn và điện trở cho các thiết bị điện như encoder và động cơ, với các thông số cụ thể về điện áp và giá trị điện trở phù hợp. Nó cũng lưu ý rằng màu dây có thể không chính xác cho tất cả các loại encoder. Các kết nối điều khiển được nêu rõ cho việc điều khiển động cơ và hệ thống điều khiển.



























