Download as PDF, PPTX



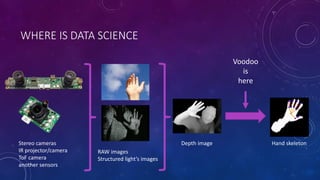

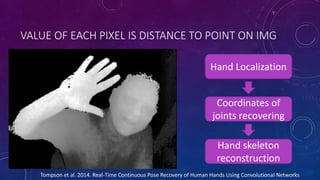
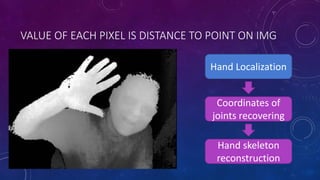

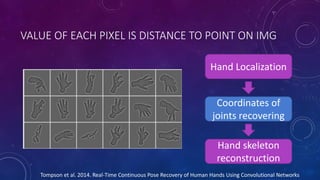
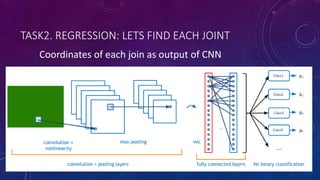
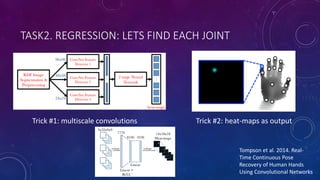
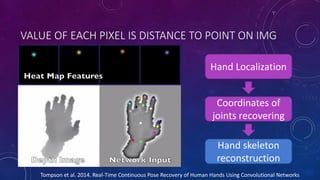
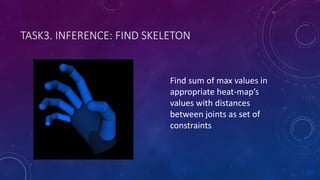

This document discusses gesture recognition technology. It begins with an overview of current gesture recognition devices and the hardware they use like depth cameras. It then discusses the challenges of localizing hands in images, recovering the coordinates of joints, and reconstructing the hand skeleton. The document outlines three main tasks: localization, regression of joint coordinates using convolutional neural networks, and skeleton inference to find the hand pose. The goal is to enable accurate and real-time gesture recognition using standard equipment.






















![[NS][Lab_Seminar_250120]HandDAGT: A Denoising Adaptive Graph Transformer for ...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar250120handdagt-250120113035-c191516d-thumbnail.jpg?width=640&height=640&fit=bounds)





















