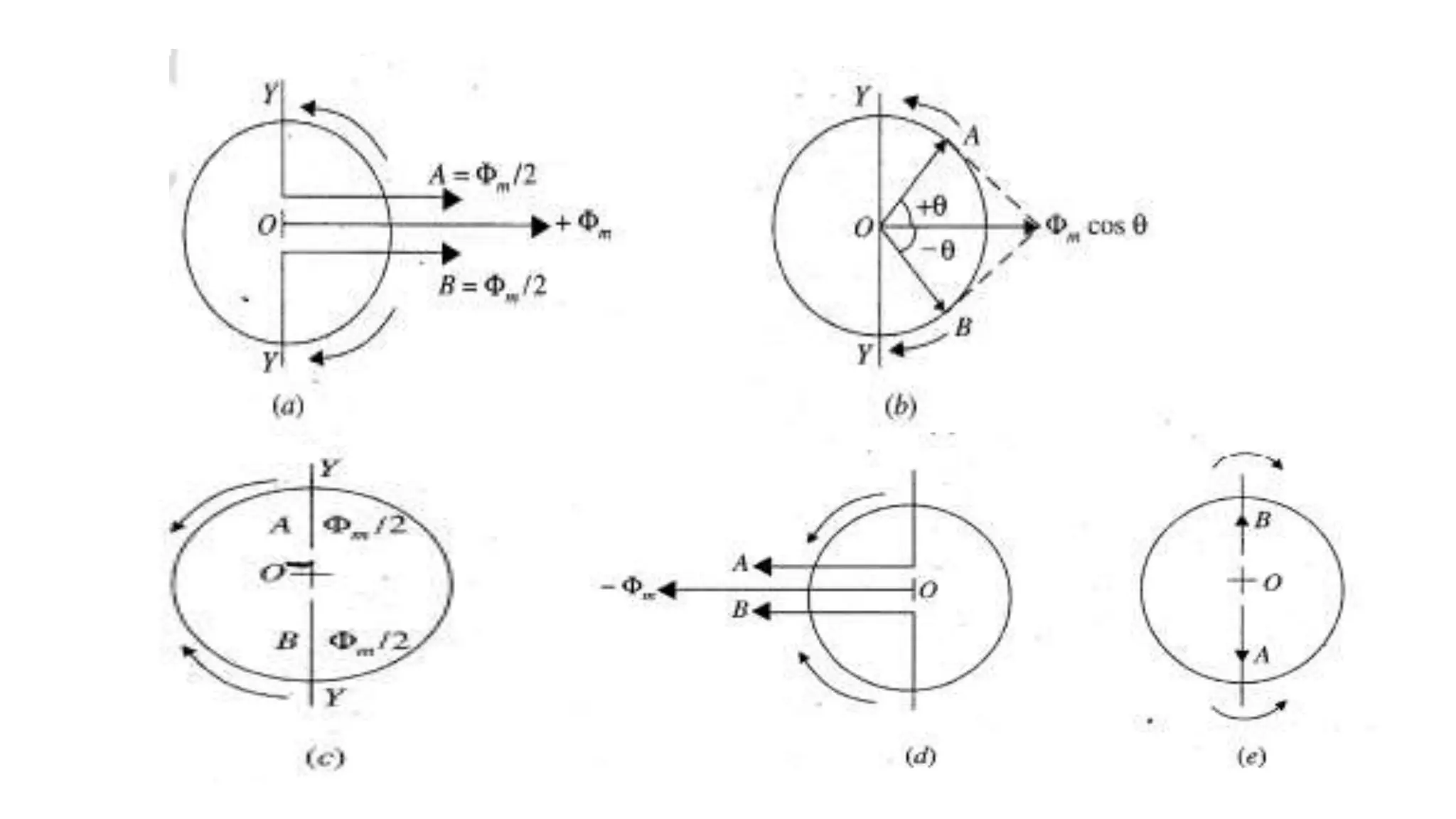
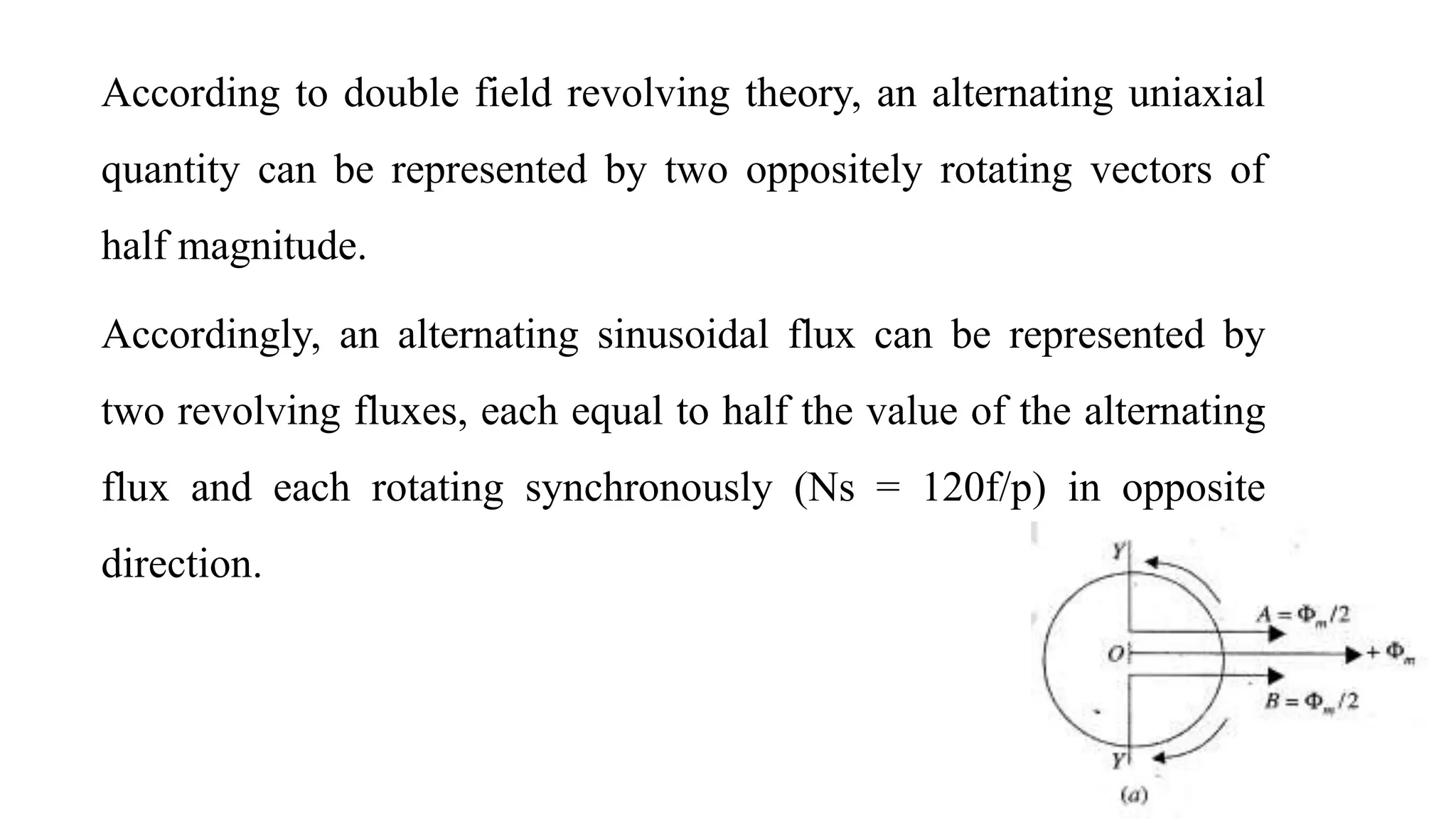
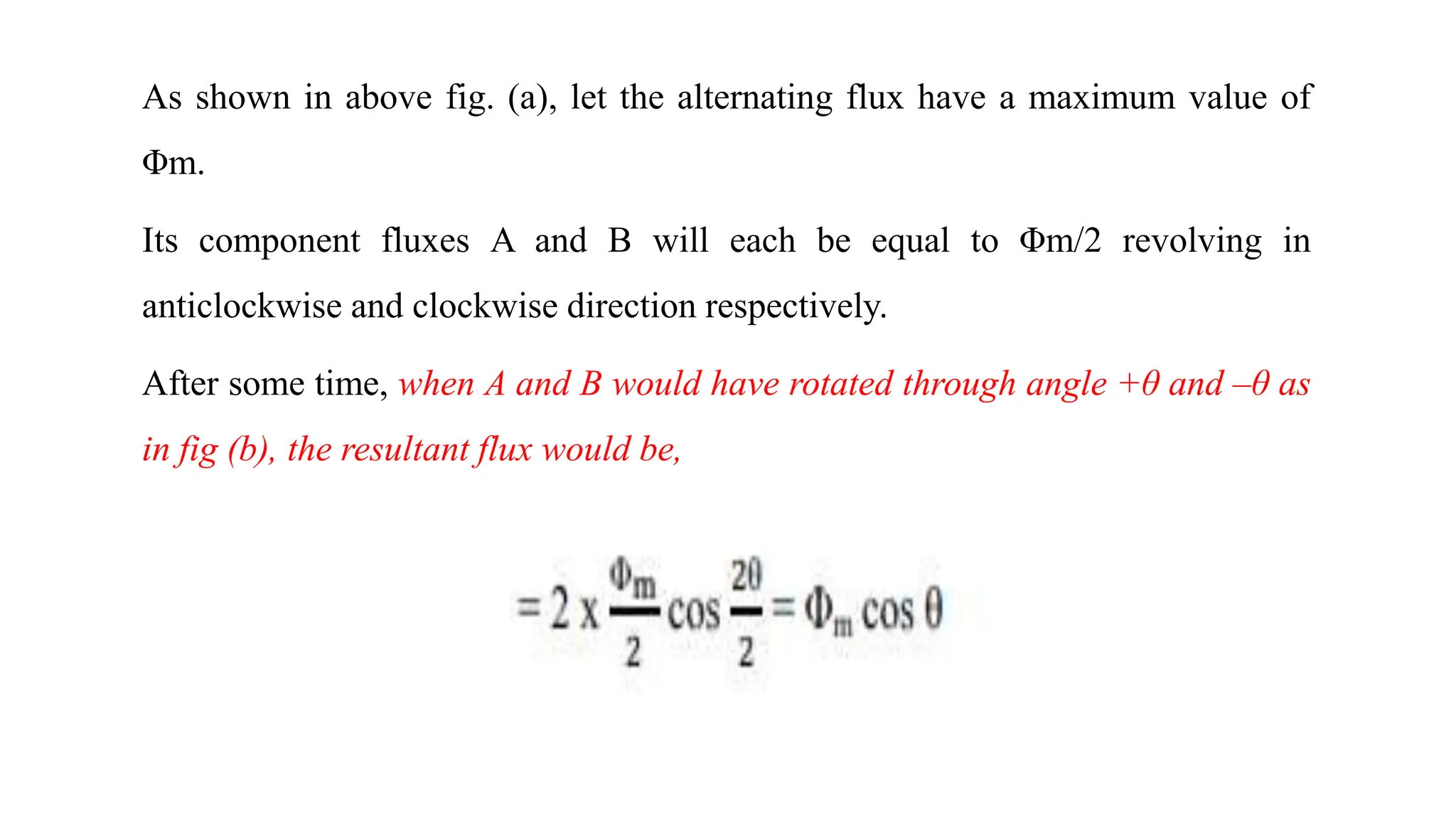
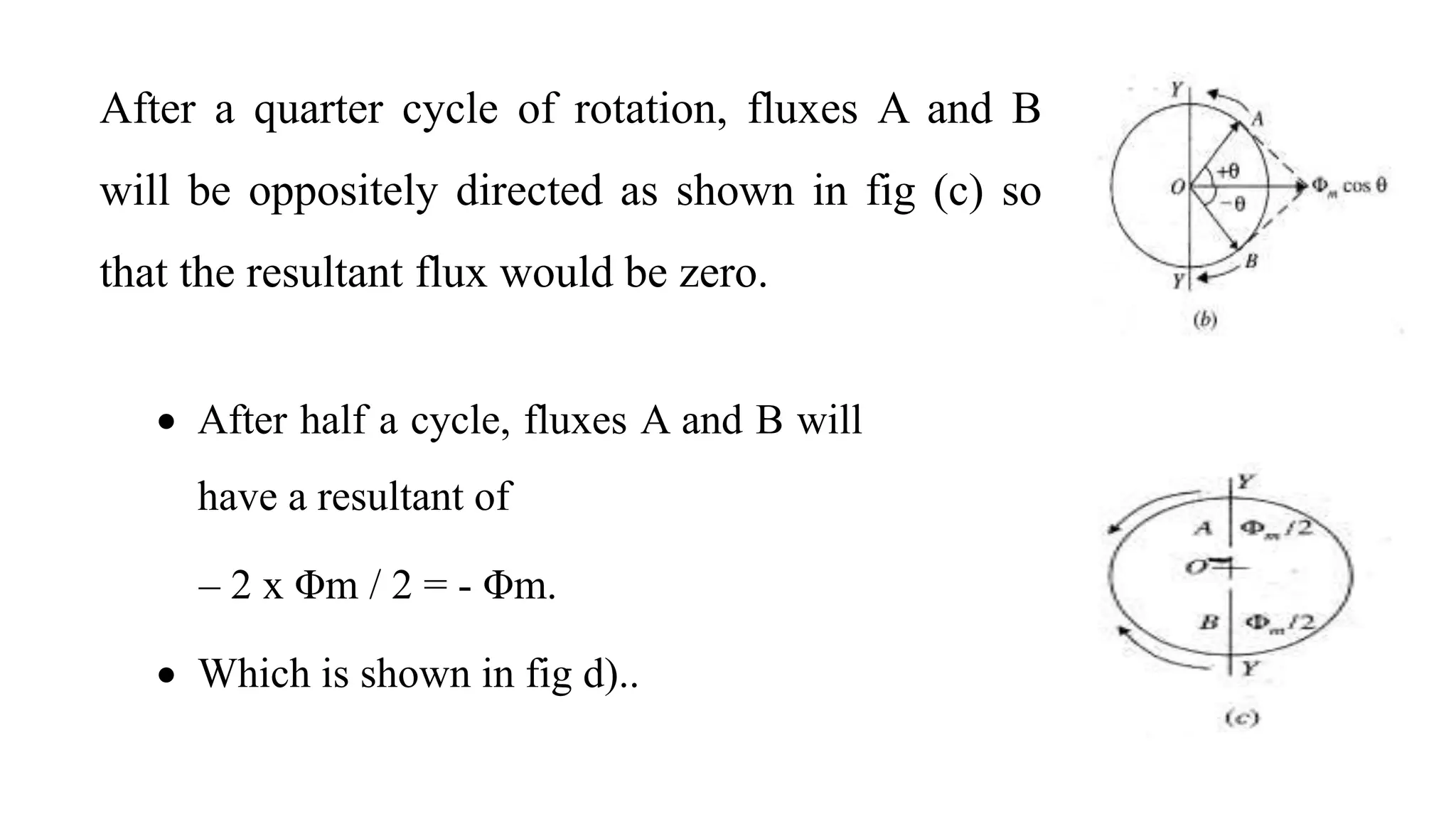
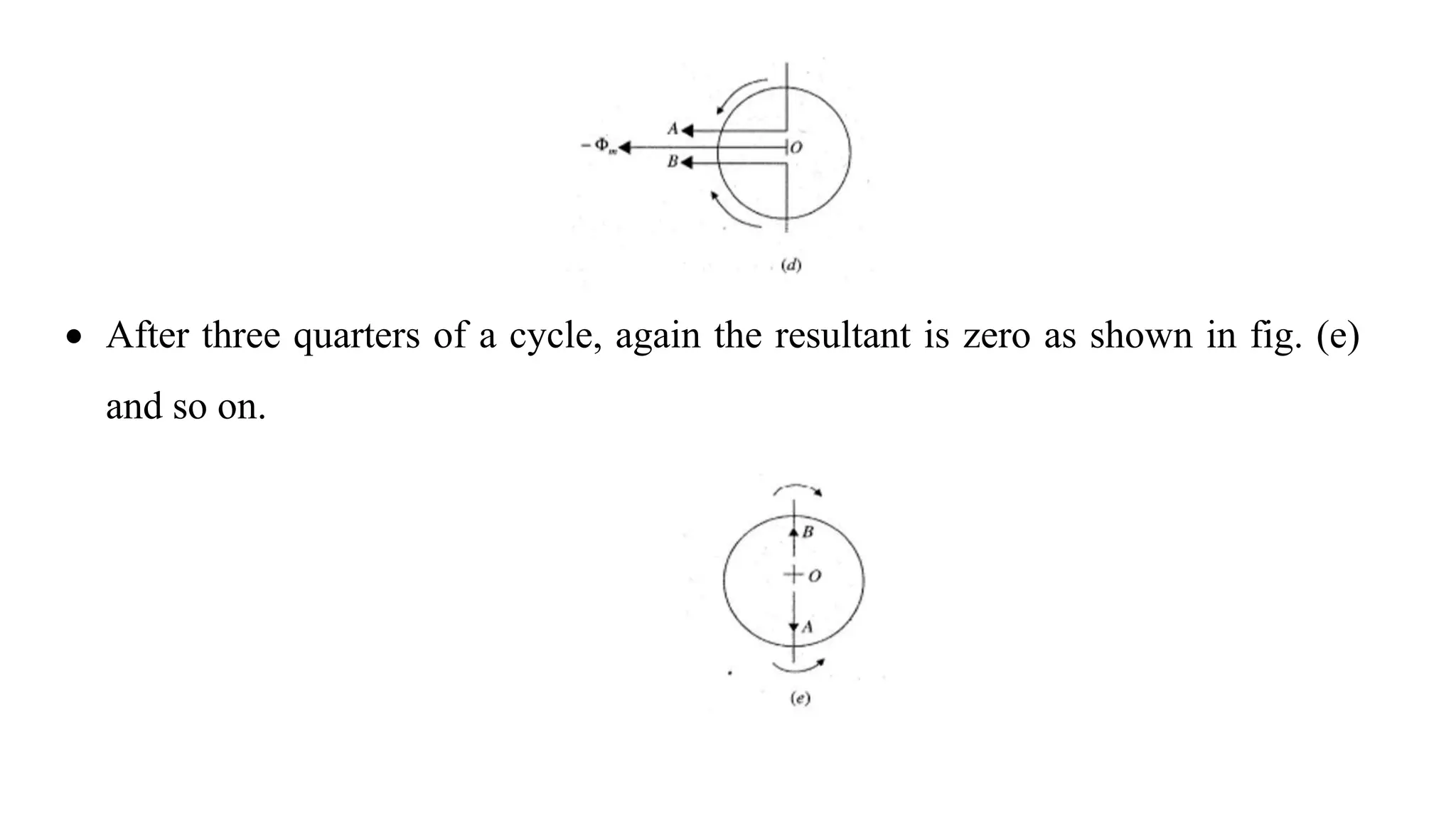
The document discusses single-phase induction motors, focusing on their constructional features and two primary theories: double revolving field theory and cross field theory. It explains how the double revolving field theory resolves a single pulsating magnetic field into two opposite rotating fields, and illustrates the behavior of these fields over a cycle to demonstrate the nature of alternating flux. Additionally, it covers split-phase starting methods and applications relevant to these motors.