This document describes a custom MATLAB simulation of 3D rigid body physics for modeling a novel roller coaster suspension system. Key points:
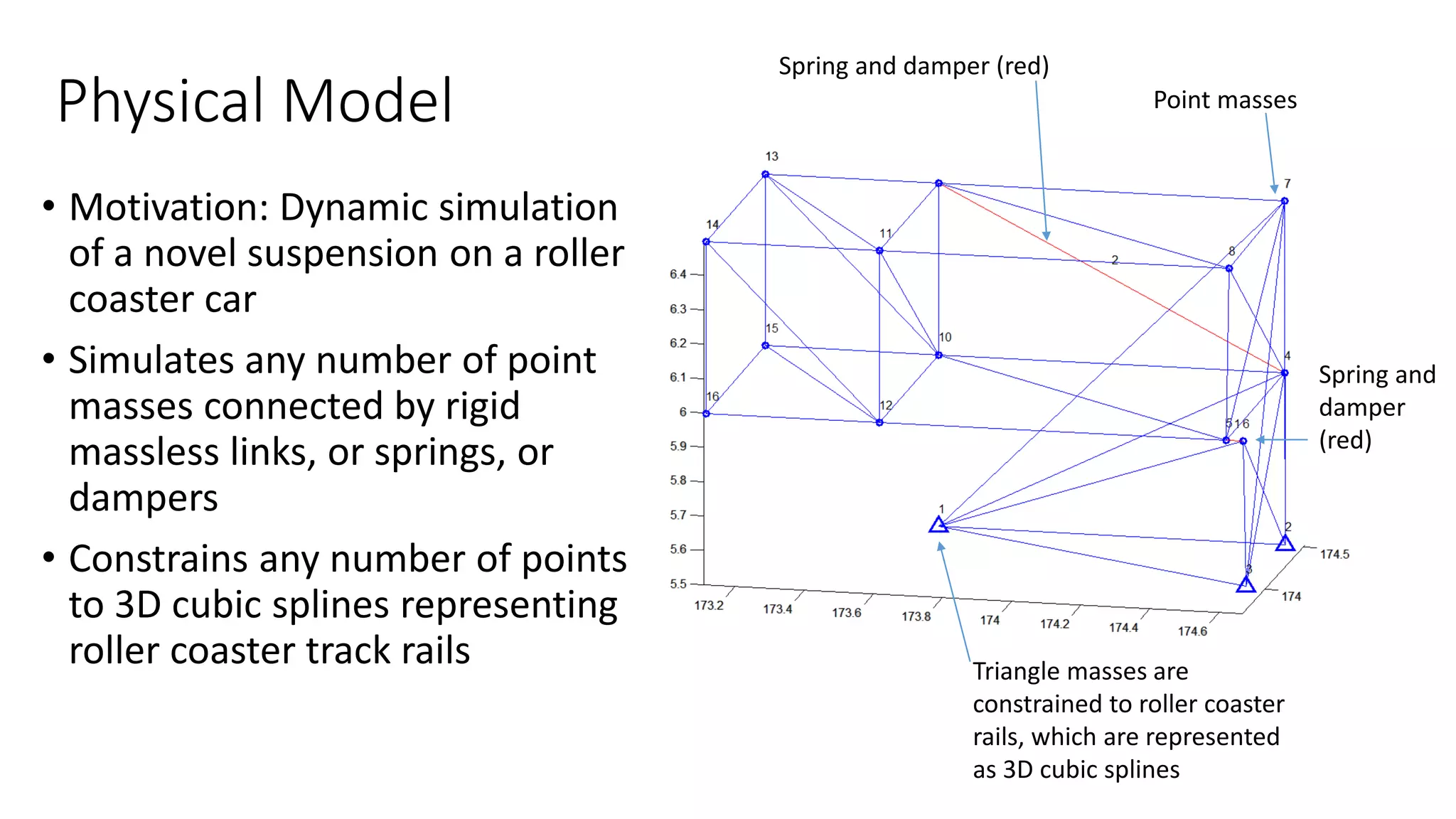
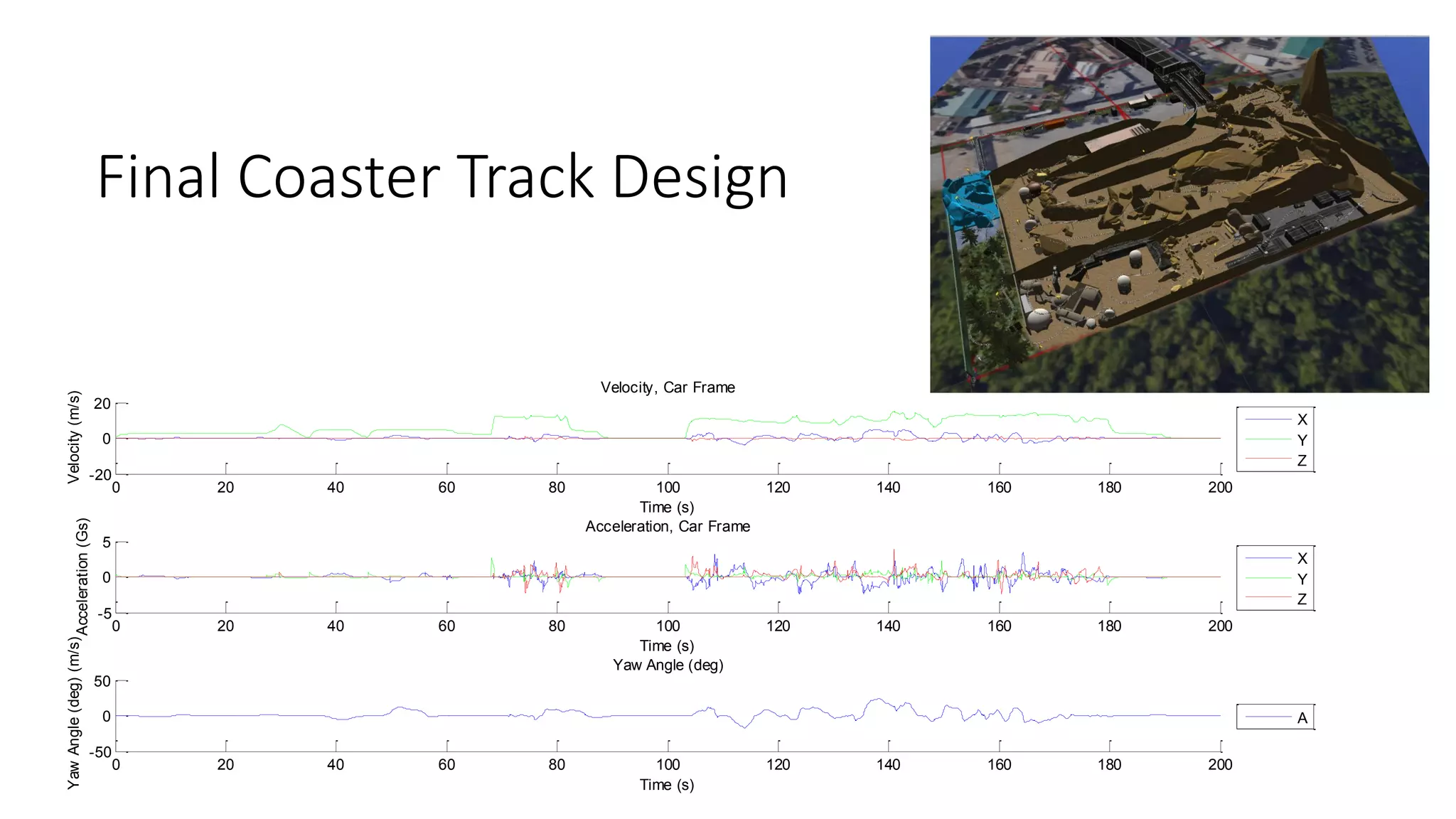
- The simulation models point masses connected by rigid links and springs/dampers to represent a roller coaster car and its suspension moving along 3D spline tracks.
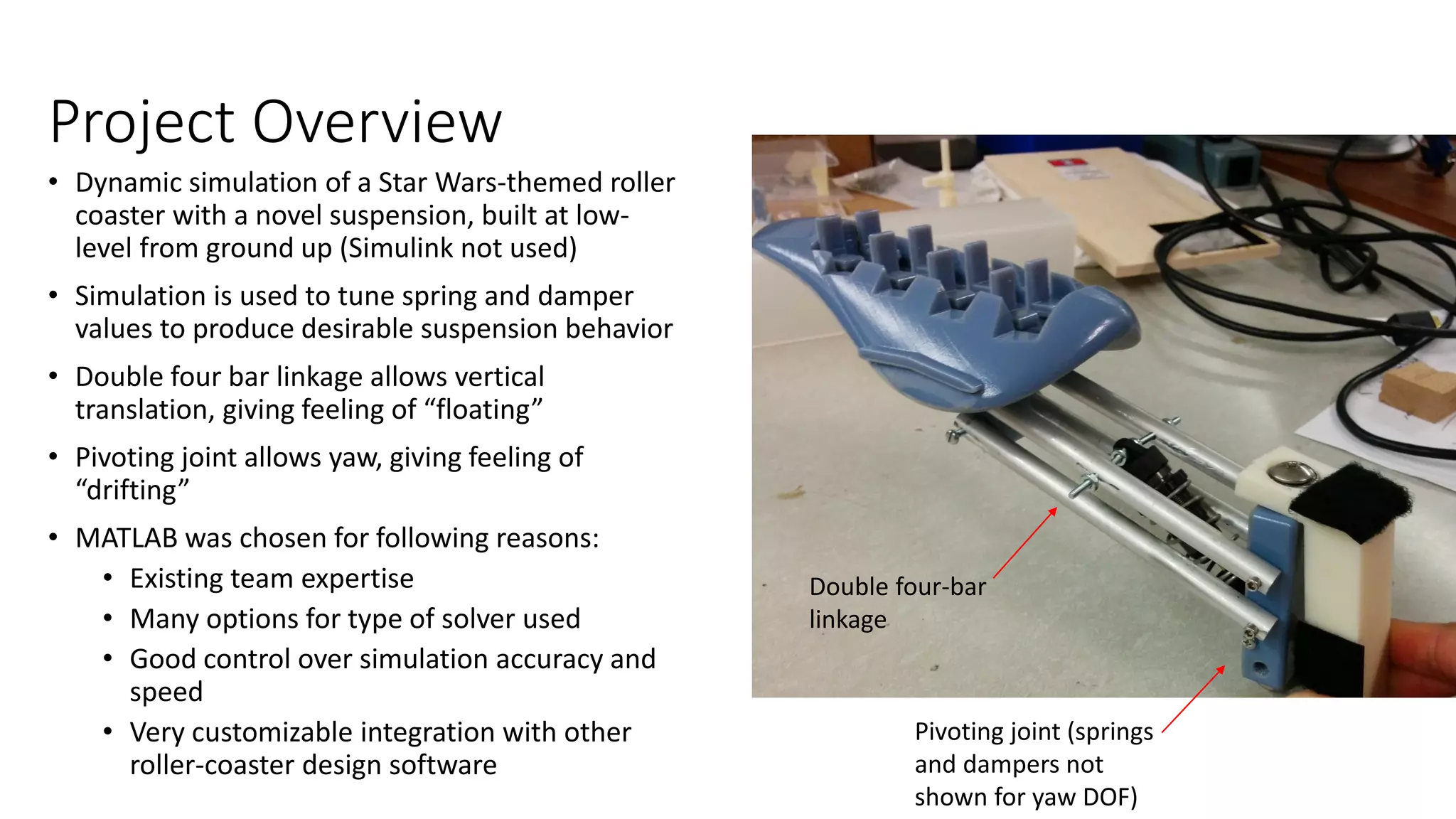
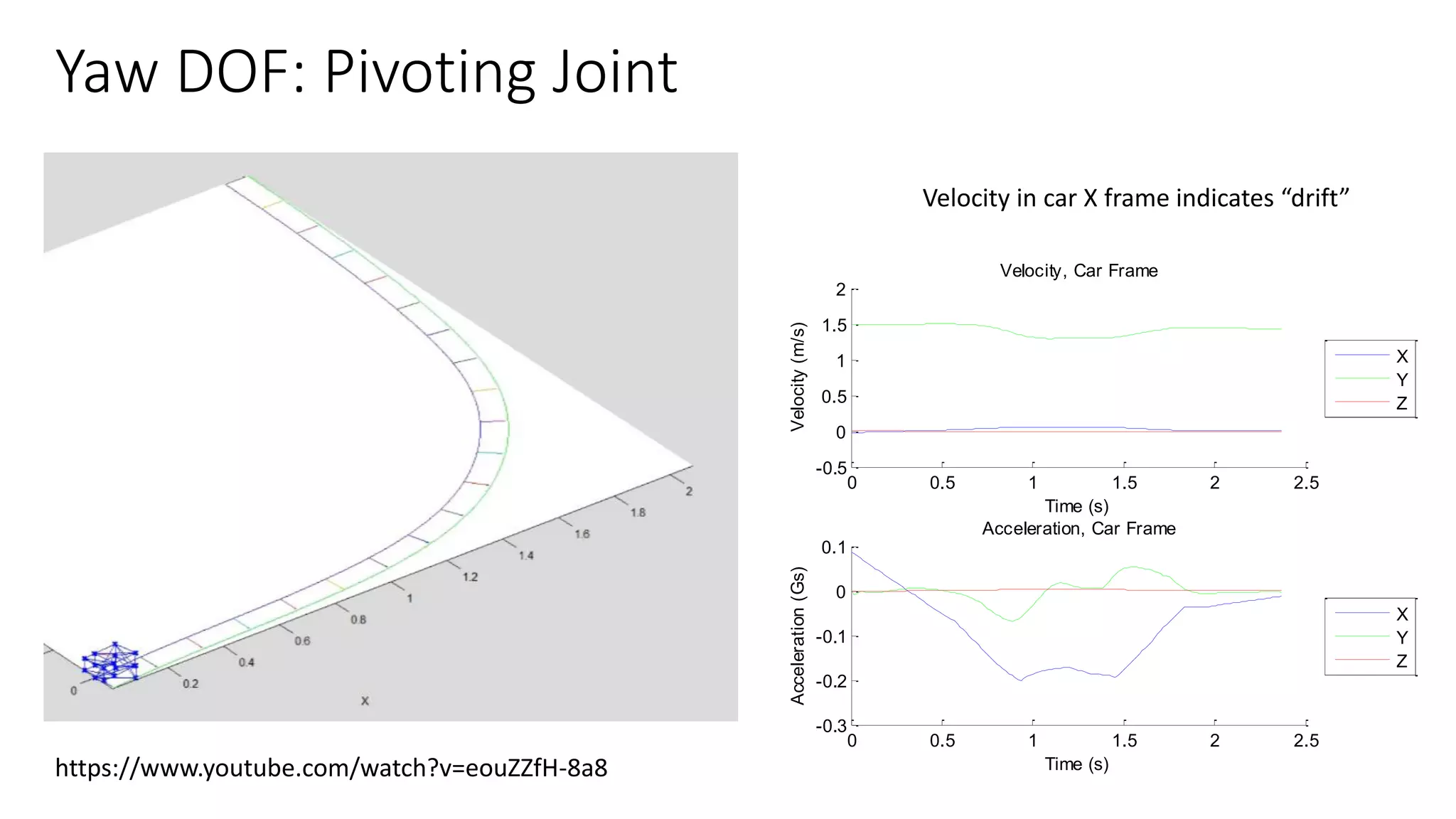
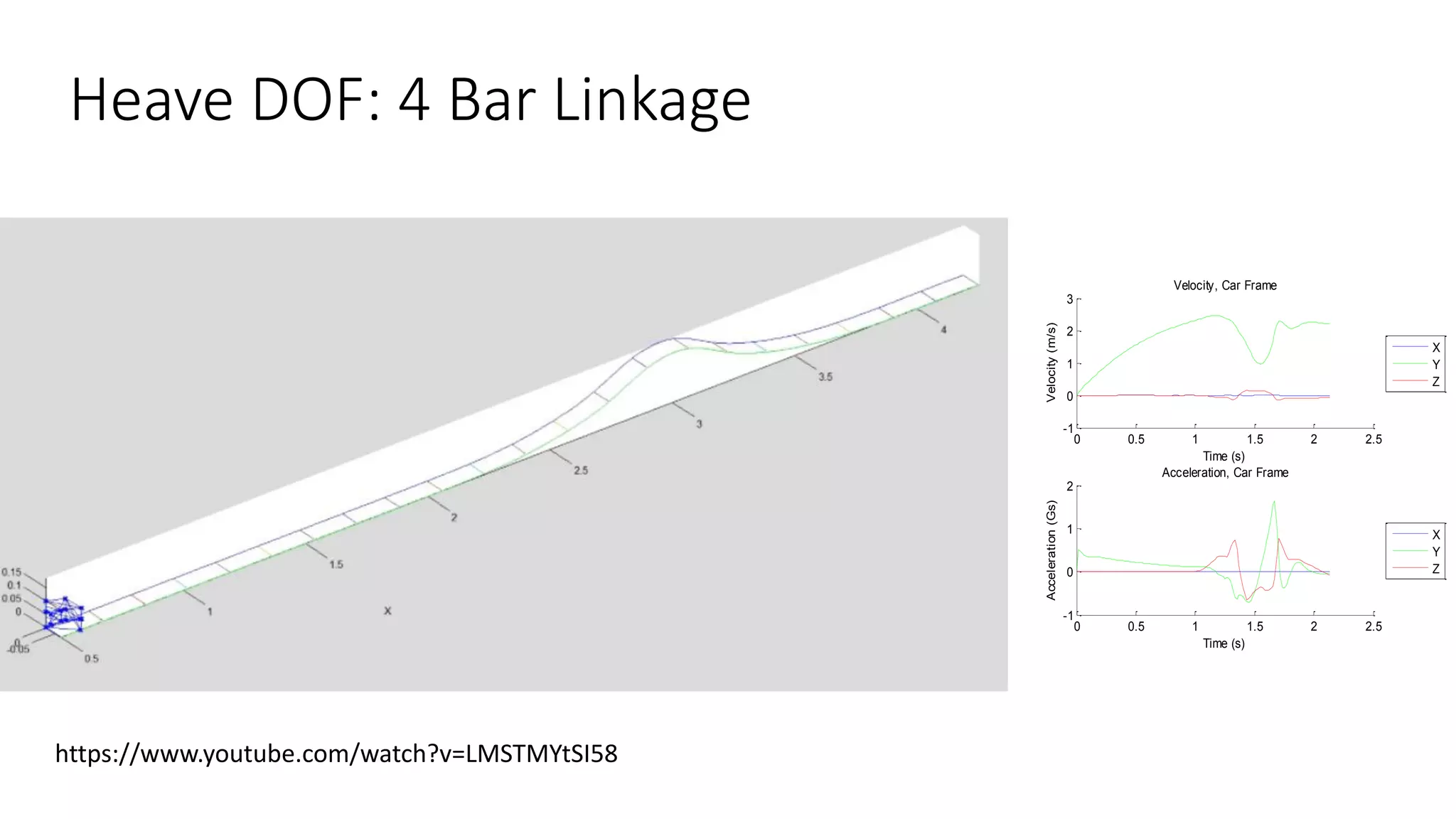
- A double four-bar linkage and pivoting joint allow vertical and yaw movement to give sensations of "floating" and "drifting".
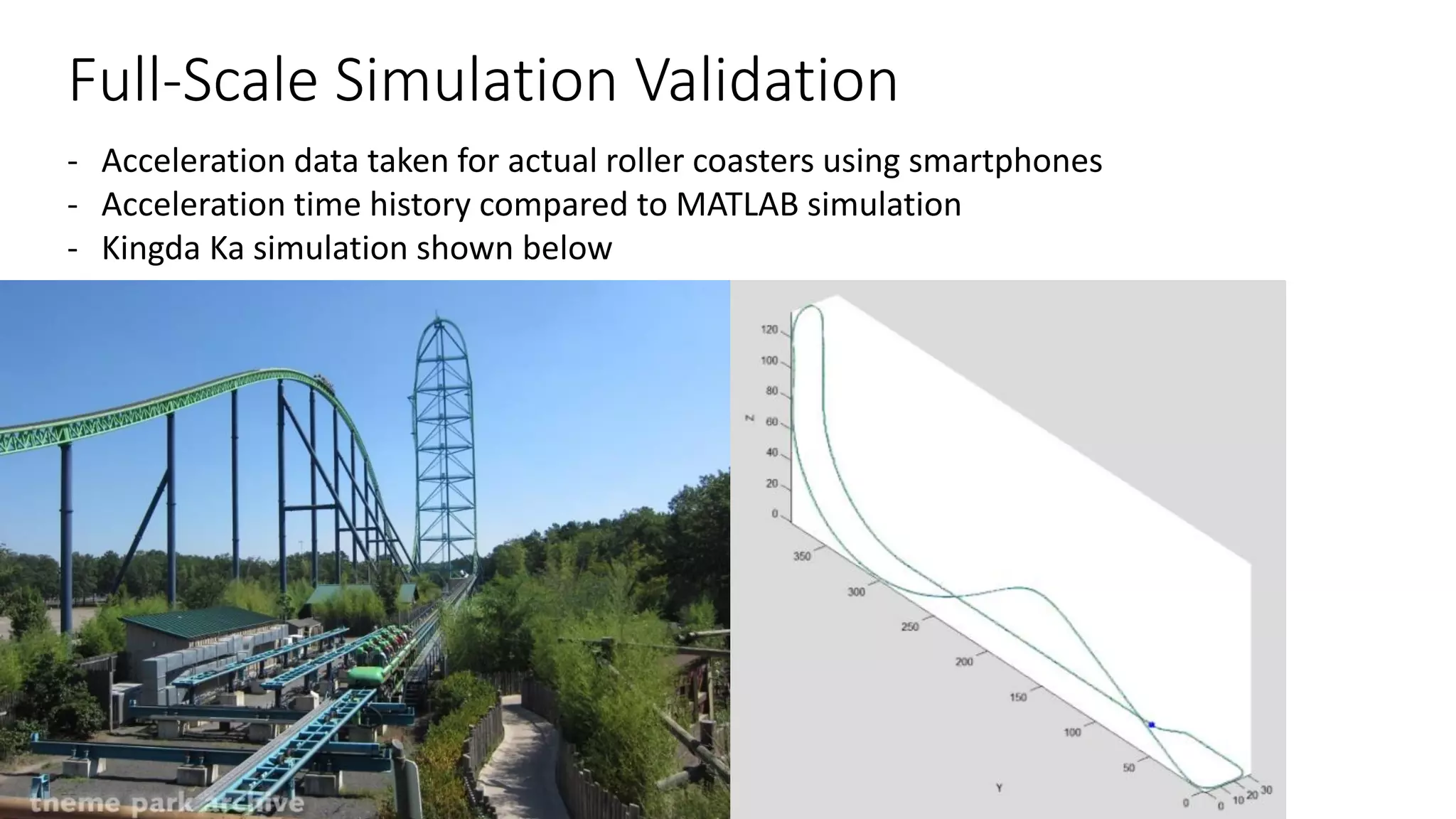
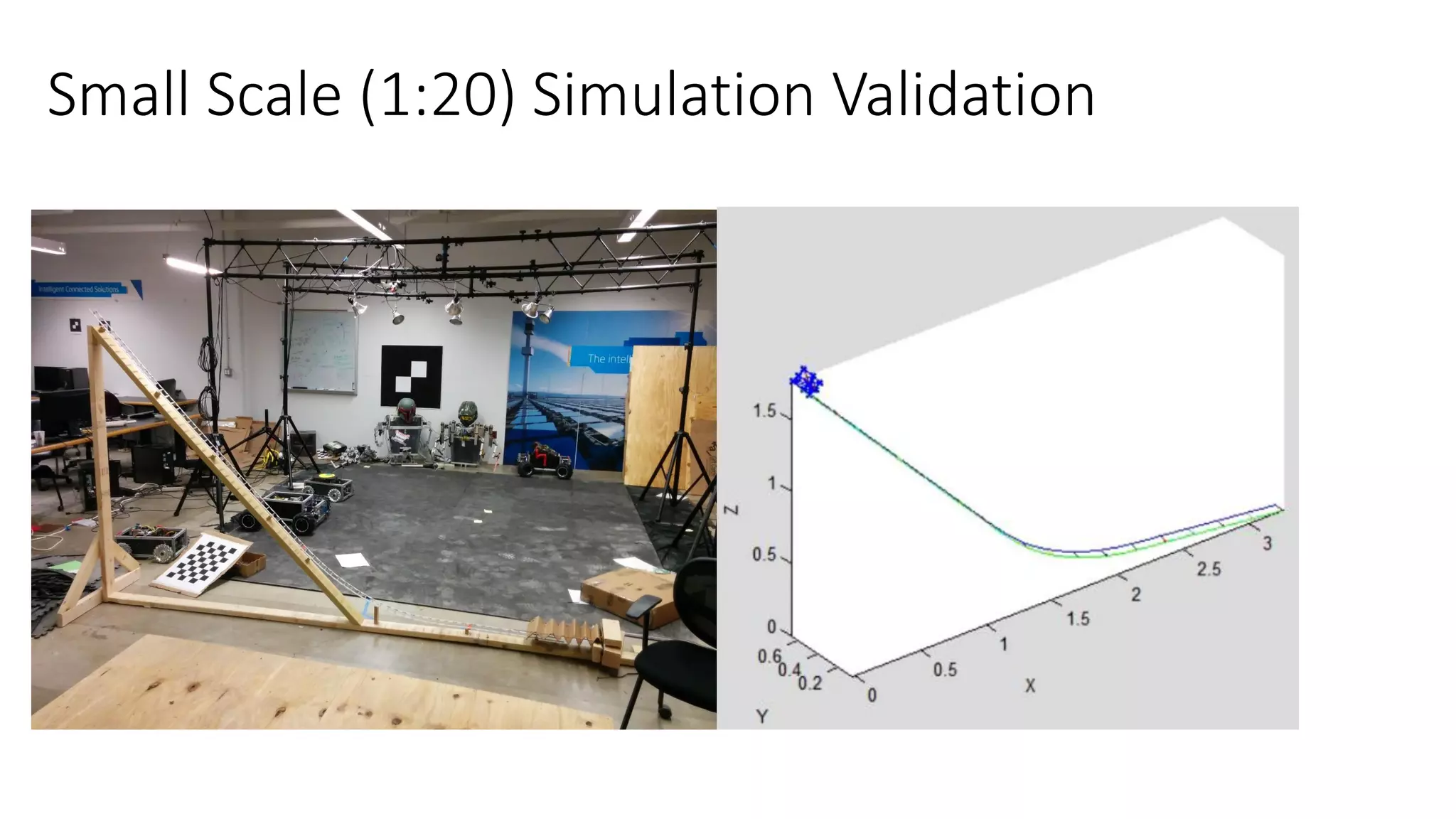
- The simulation is validated against acceleration data from real roller coasters and used to tune spring/damper values for desirable suspension behavior.
- MATLAB was chosen for its solver options, accuracy/speed control, and integration with coaster design software.