Download as PDF, PPTX
![Motivation (1)
• Geolocalization by Image Retrieval
• Conventional approach searching nearest neighbor in geo-tagged
image database.
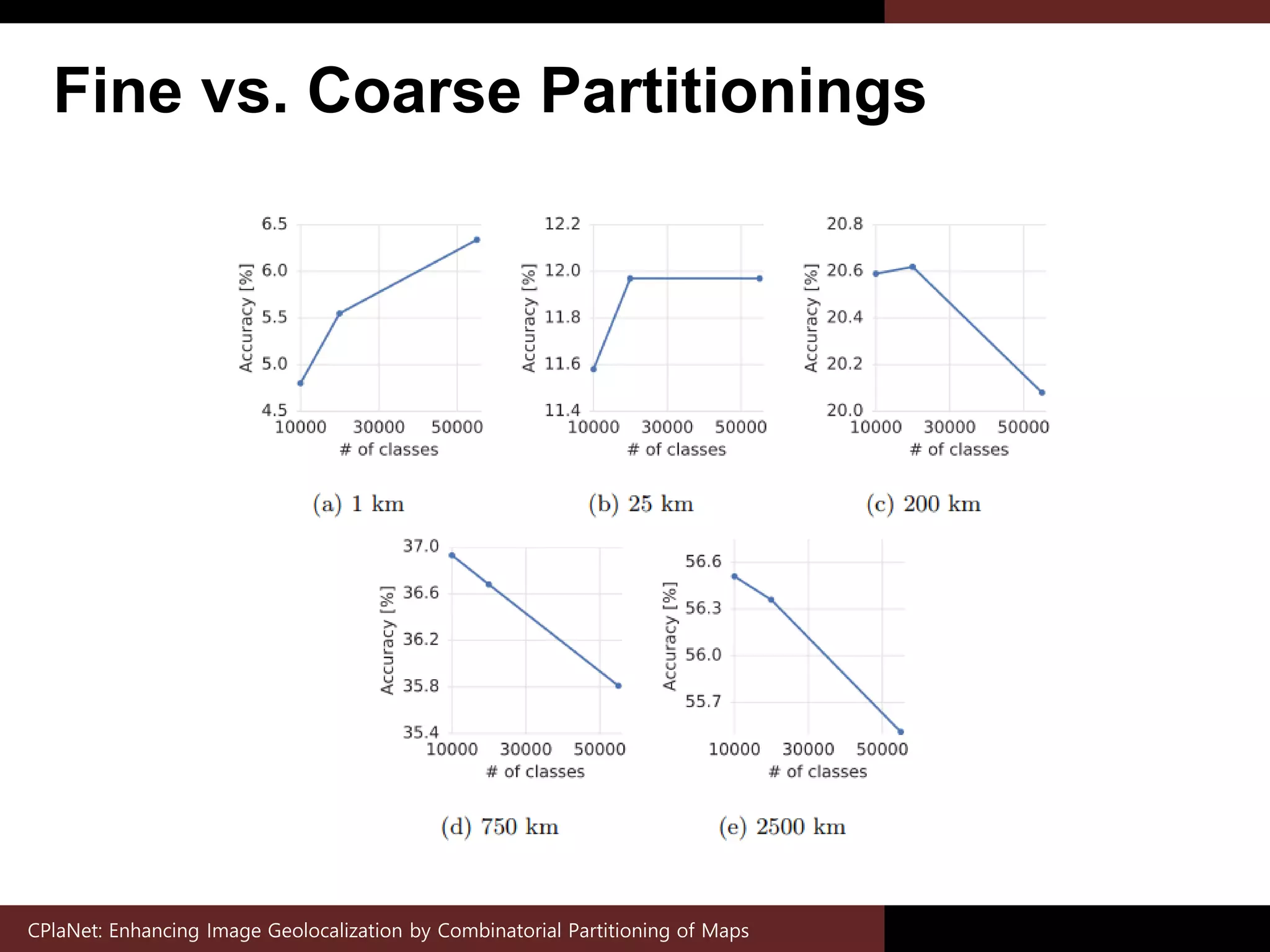
• Geolocalization by Classification
• Recently proposed method classifying image over geoclasses
partitioning maps [1].
CPlaNet: Enhancing Image Geolocalization by Combinatorial Partitioning of Maps
[1] Weyand, T., Kostrikov, I., Philbin, J.: PlaNet-Photo Geolocation with Convolutional Neural Networks. In: ECCV. (2016)
Query photo](https://image.slidesharecdn.com/cplanetenhancingimagegeolocalizationbycombinatorialpartitioningofmaps-181205051429/75/CPlaNet-Enhancing-Image-Geolocalization-by-Combinatorial-Partitioning-of-Maps-3-2048.jpg)
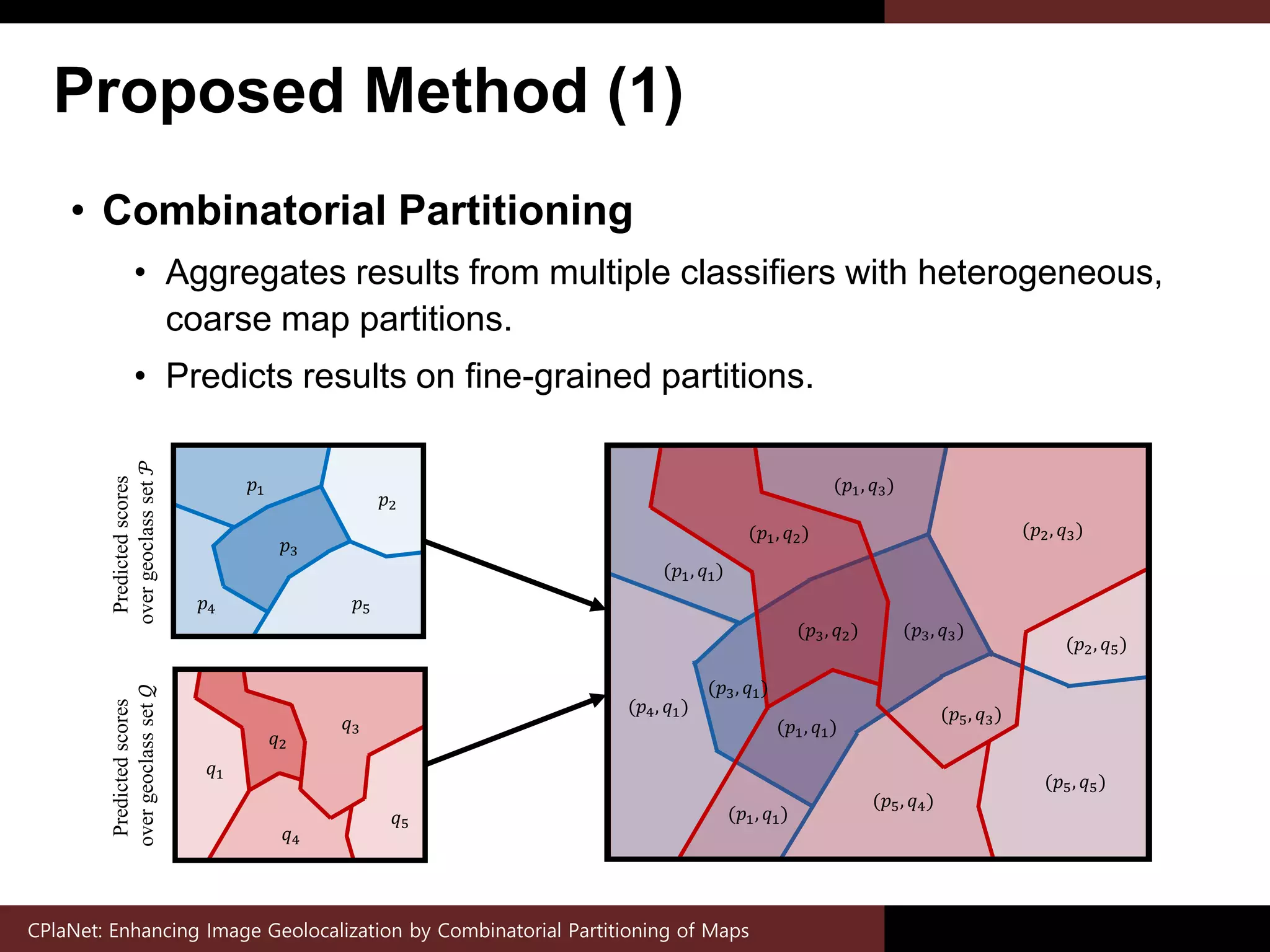

The document presents 'CPlanet', a method for improving image geolocalization through combinatorial partitioning of maps, which enhances the prediction of geographical locations based on visual information. It combines results from multiple classifiers to create fine-grained geoclass sets, addressing the limitations of previous methods in handling complex class representations and data deficiencies. The proposed approach demonstrates improved performance over existing techniques across multiple evaluation benchmarks.


















































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)













![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

