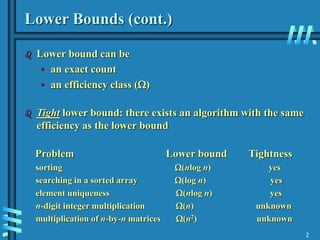
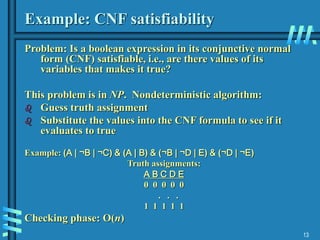
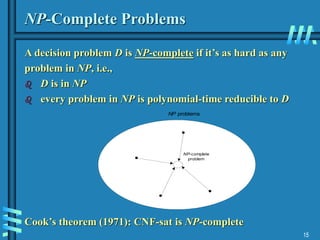
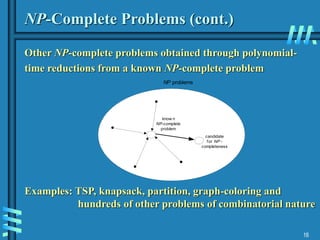
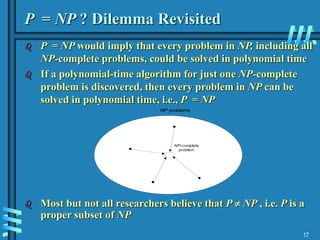
The document discusses lower bounds in computational complexity, emphasizing their significance in determining the minimum work required to solve problems such as sorting, searching, and matrix multiplication. It details methods for establishing these bounds, including decision trees and adversary arguments, and introduces complexity classes like P and NP, along with the concept of NP-completeness. The document raises the pivotal question of whether P equals NP, suggesting that if one NP-complete problem can be solved in polynomial time, all NP problems could similarly be solved in such time.