Chef Family 1
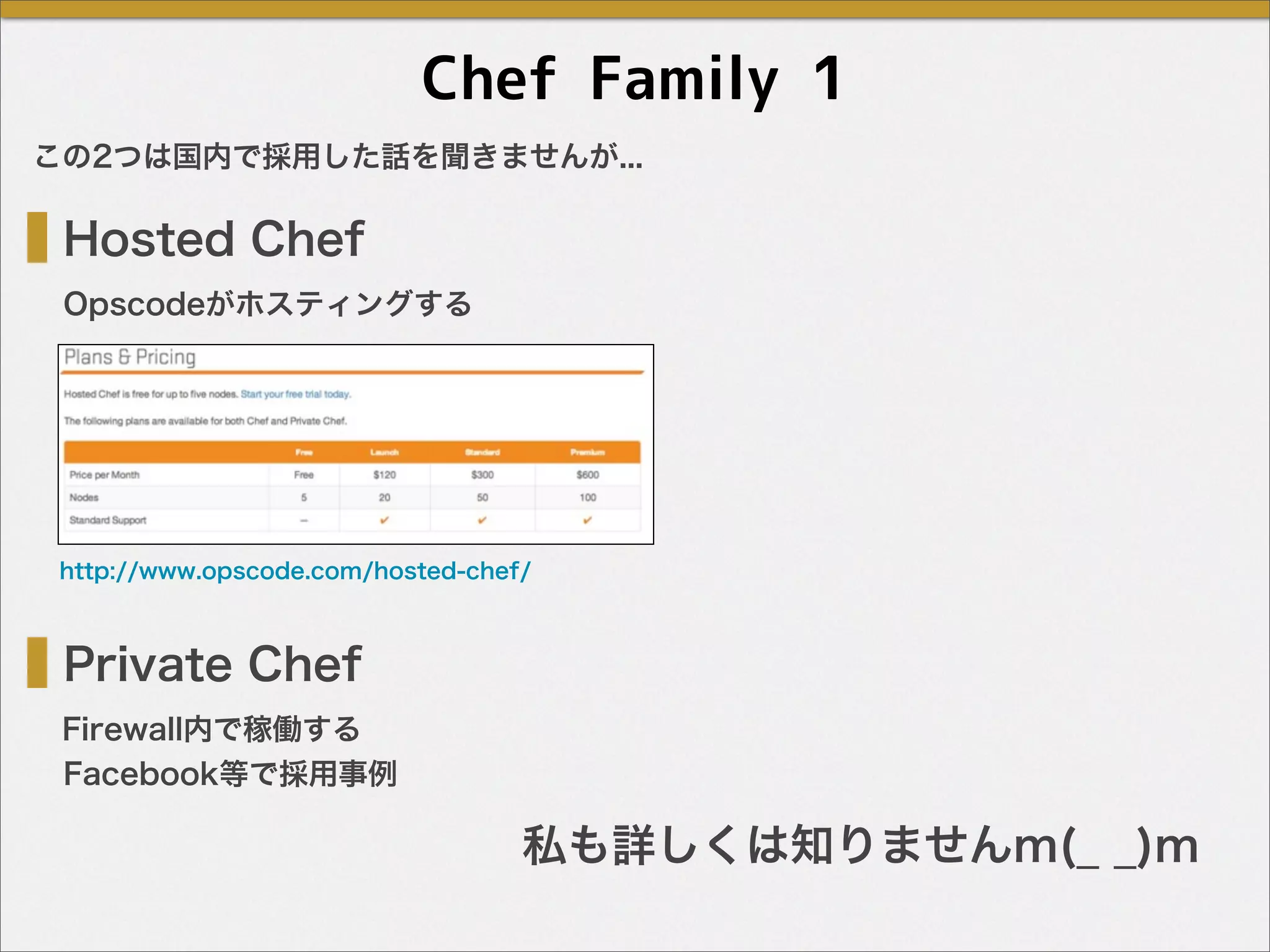
HostedChef
Private Chef
Opscodeがホスティングする
Firewall内で稼働する
http://www.opscode.com/hosted-chef/
この2つは国内で採用した話を聞きませんが...
Facebook等で採用事例
私も詳しくは知りませんm(_ _)m
10.
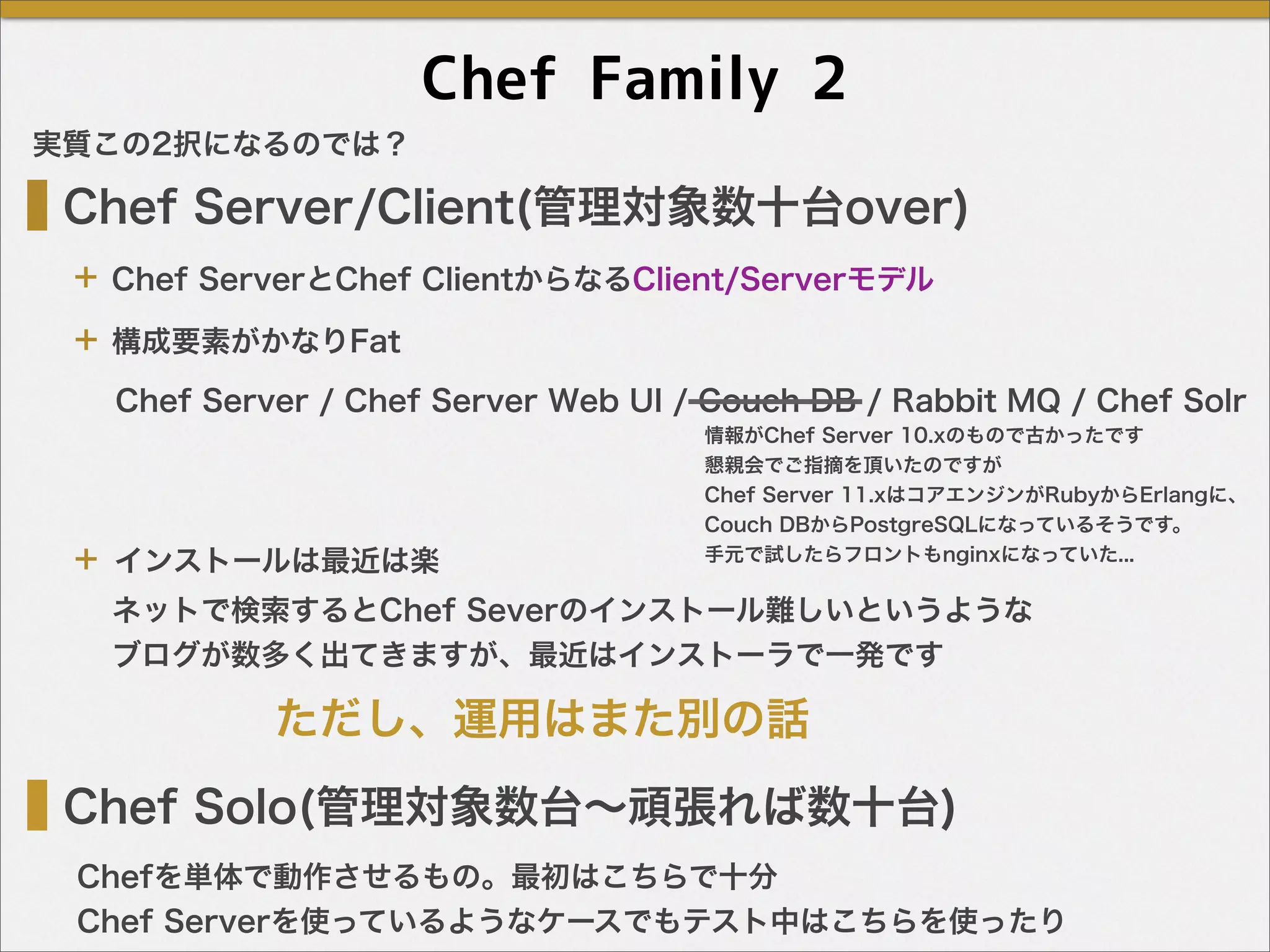
Chef Family 2
ChefServer/Client(管理対象数十台over)
Chef Solo(管理対象数台∼頑張れば数十台)
Chef ServerとChef ClientからなるClient/Serverモデル
Chefを単体で動作させるもの。最初はこちらで十分
Chef Serverを使っているようなケースでもテスト中はこちらを使ったり
Chef Server / Chef Server Web UI / Couch DB / Rabbit MQ / Chef Solr
構成要素がかなりFat
インストールは最近は楽
ネットで検索するとChef Severのインストール難しいというような
ブログが数多く出てきますが、最近はインストーラで一発です
ただし、運用はまた別の話
実質この2択になるのでは?
+
+
+
情報がChef Server 10.xのもので古かったです
懇親会でご指摘を頂いたのですが
Chef Server 11.xはコアエンジンがRubyからErlangに、
Couch DBからPostgreSQLになっているそうです。
手元で試したらフロントもnginxになっていた...
Vagrant本あるよ
Vagrant: Up andRunning
今のところ英語版だけですが、日本語版出すことが
2013/7/12のvagrant meetup後に決まったようです。
英語版でも150ページ弱、7章のプラグイン開発とか読まないなら100ページほどです。
Create and Manage Virtualized Development Environments
By Mitchell Hashimoto
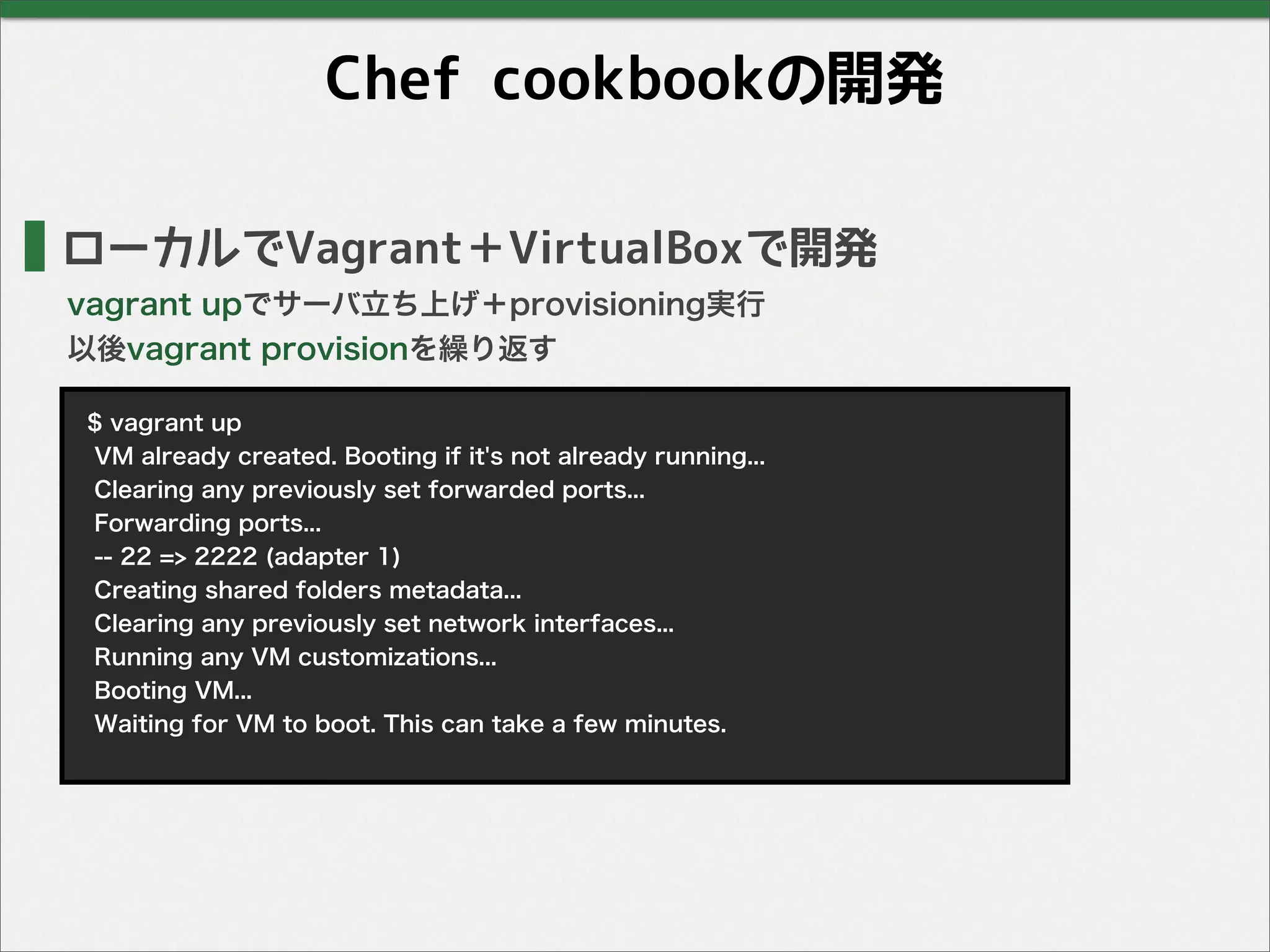
Chef cookbookの開発
ローカルでVagrant+VirtualBoxで開発
vagrant upでサーバ立ち上げ+provisioning実行
以後vagrantprovisionを繰り返す
$ vagrant up
VM already created. Booting if it's not already running...
Clearing any previously set forwarded ports...
Forwarding ports...
-- 22 => 2222 (adapter 1)
Creating shared folders metadata...
Clearing any previously set network interfaces...
Running any VM customizations...
Booting VM...
Waiting for VM to boot. This can take a few minutes.

![Chefの基本
弊社での実際のシステム構築時のChef活用方法
Chefのベストプラクティス
service do
end
action [:enable, :start]
service do
end
action [:enable, :start]
今後Chefサーバ等の運用で実現したいことservice do
end
action [:enable, :start]
service do
end
action [:enable, :start]
本日のrecipe](https://image.slidesharecdn.com/chefv0-130725021331-phpapp01/75/Chef-v0-2-0-3-2048.jpg)
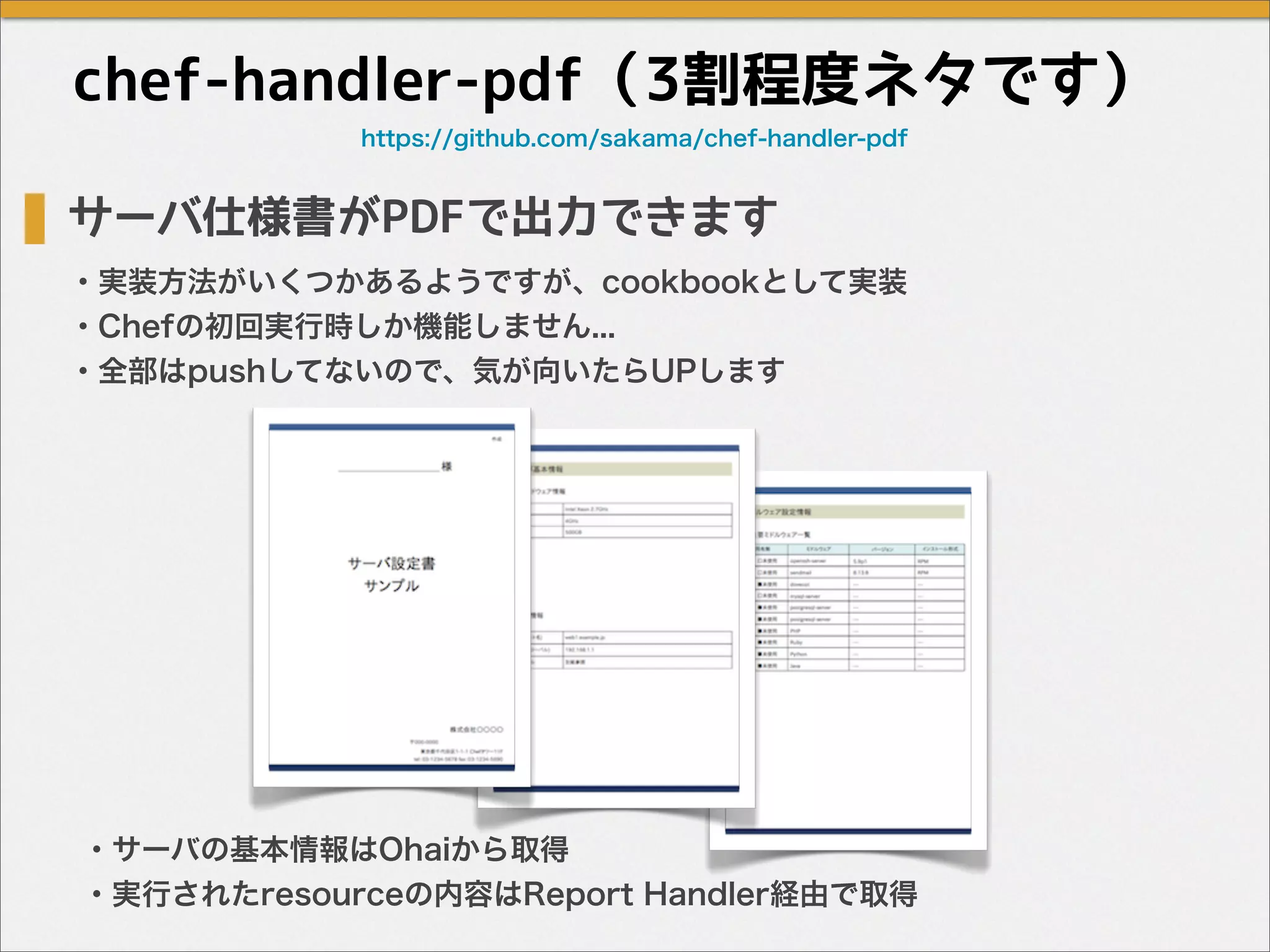
![Report Handler / Exception Handler
使い方によってはいろいろできると思います
実はよく目にしているかもしれない
handlerを作成するとChefで実行された内容等が取得可能
・実行完了時にメール通知
・実行完了時にIRCに通知する
・実行時のログをIaaSのディスクにアップロードする
http://docs.opscode.com/essentials_handlers.html
[2013-07-18T08:54:47+00:00] INFO: Chef Run complete in 37.044959889 seconds
[2013-07-18T08:54:47+00:00] INFO: Running report handlers
[2013-07-18T08:54:47+00:00] INFO: Report handlers complete
Chef Solo実行完了時に表示されるアレです
様々なhandlerが公開されています
Report Handler
Exception Handler
Chef実行完了時に特定動作を起動する
Chef実行失敗時に特定動作を起動する](https://image.slidesharecdn.com/chefv0-130725021331-phpapp01/75/Chef-v0-2-0-29-2048.jpg)
![ニフティクラウドの場合
Cloud Automation βが6/4に公開された
(1) 設定用JSONから漂う芳醇なChefの香り
{
"run_list": [
"recipe[nc::dependency_resolver]",
"recipe[nc::manager_store]",
"recipe[nc::manager]"
],
"nc": {
(2) 中でもChef使ってるみたいです...よ?](https://image.slidesharecdn.com/chefv0-130725021331-phpapp01/75/Chef-v0-2-0-52-2048.jpg)