Downloaded 127 times
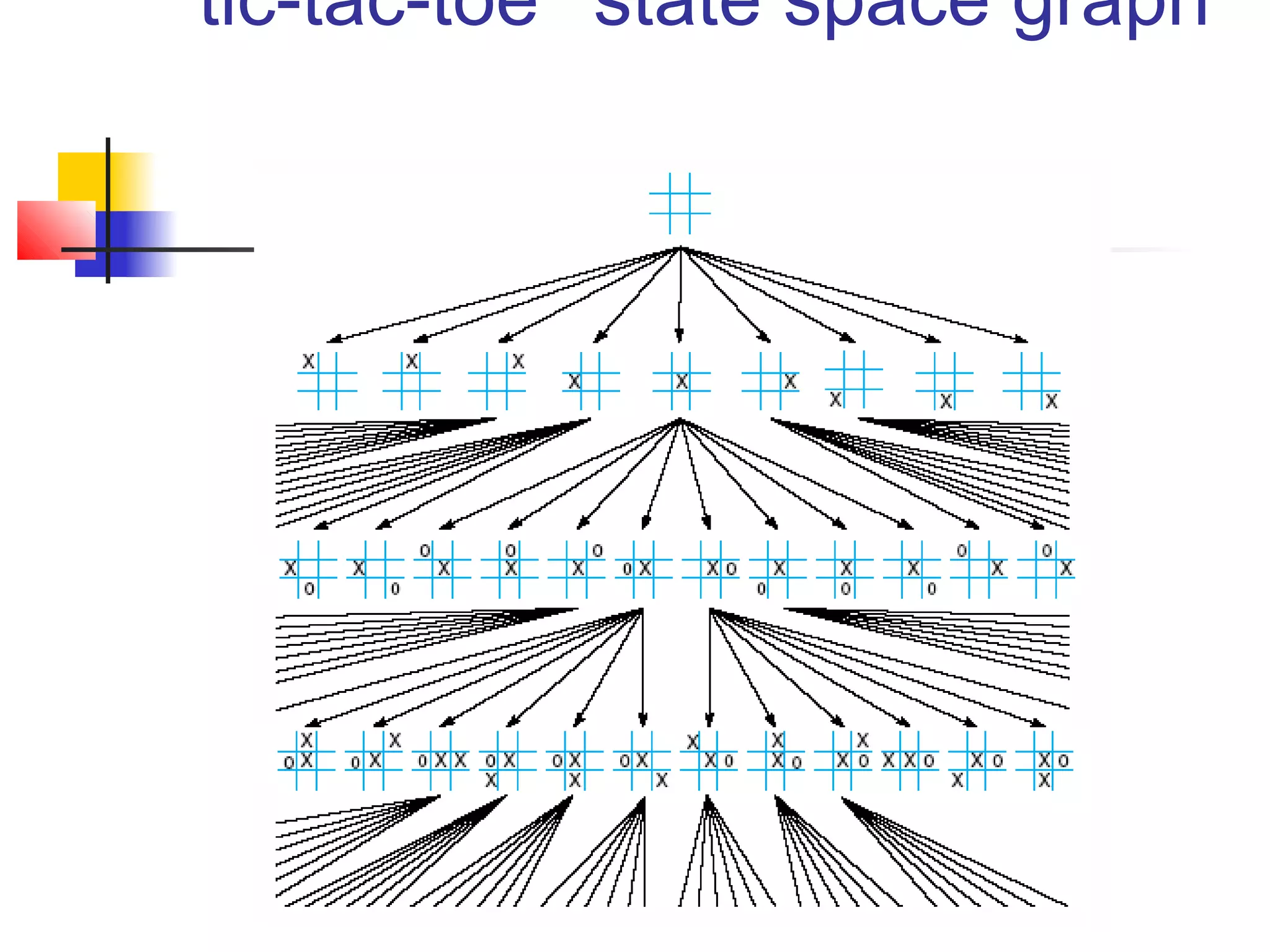
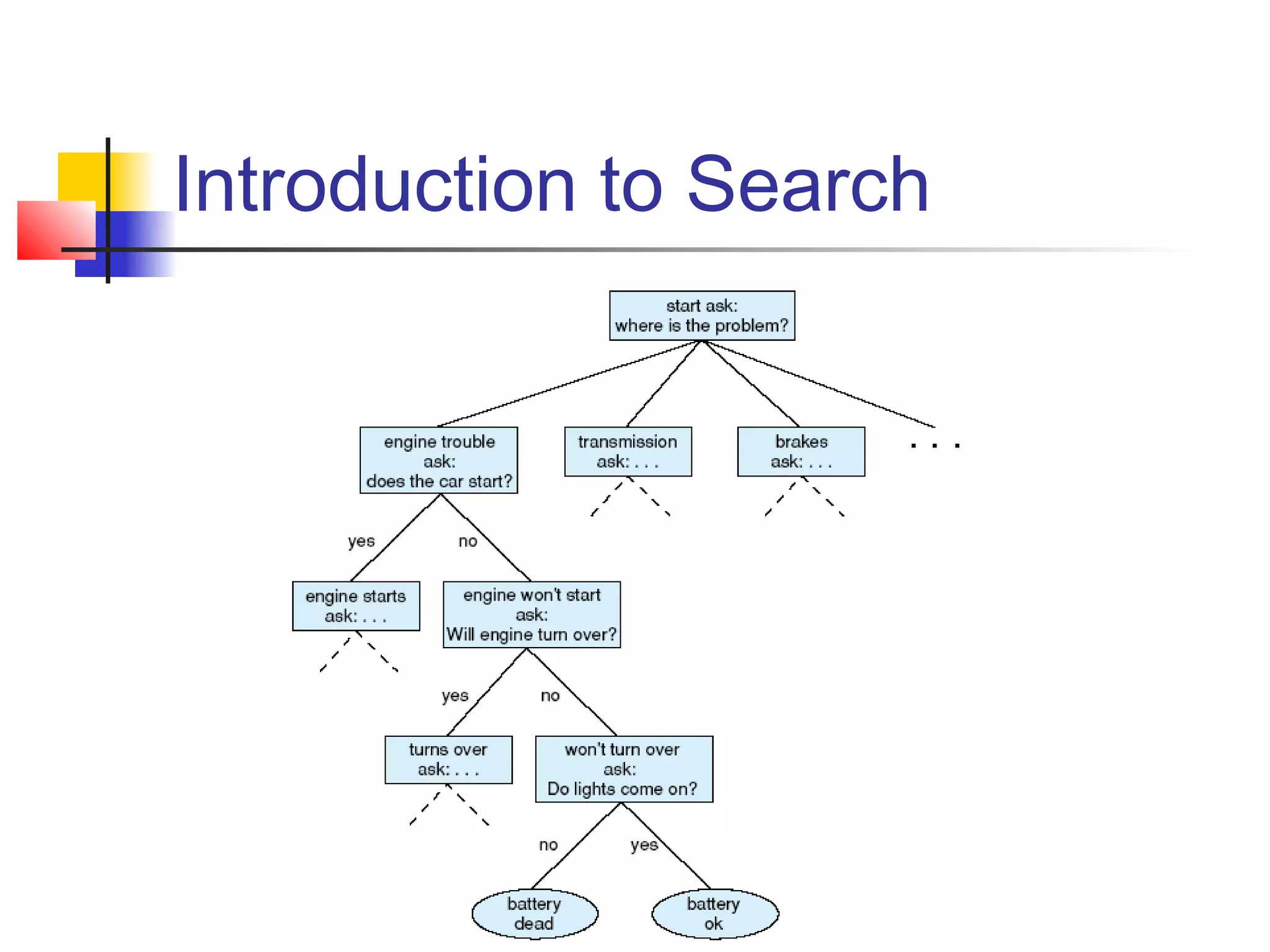

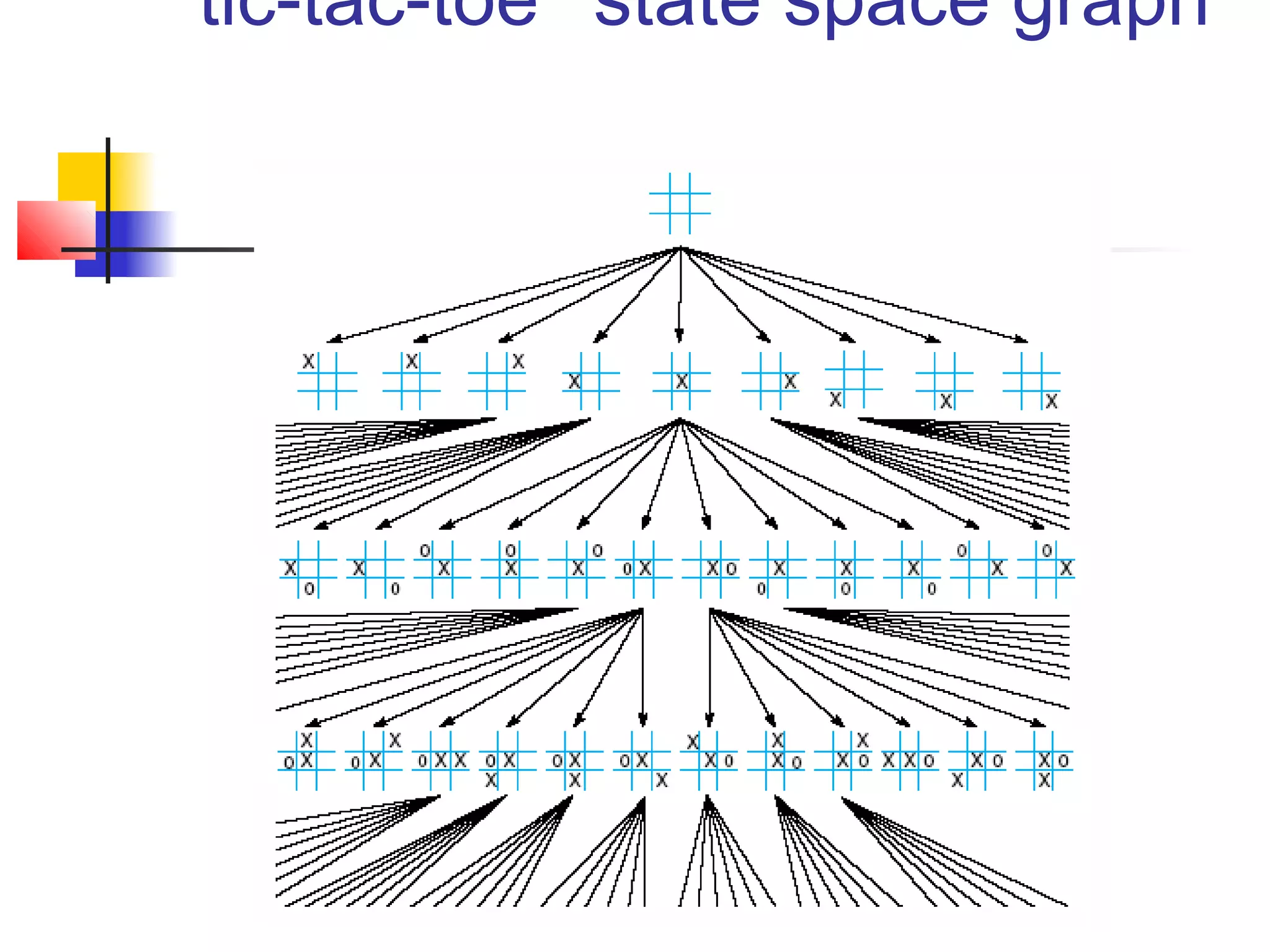
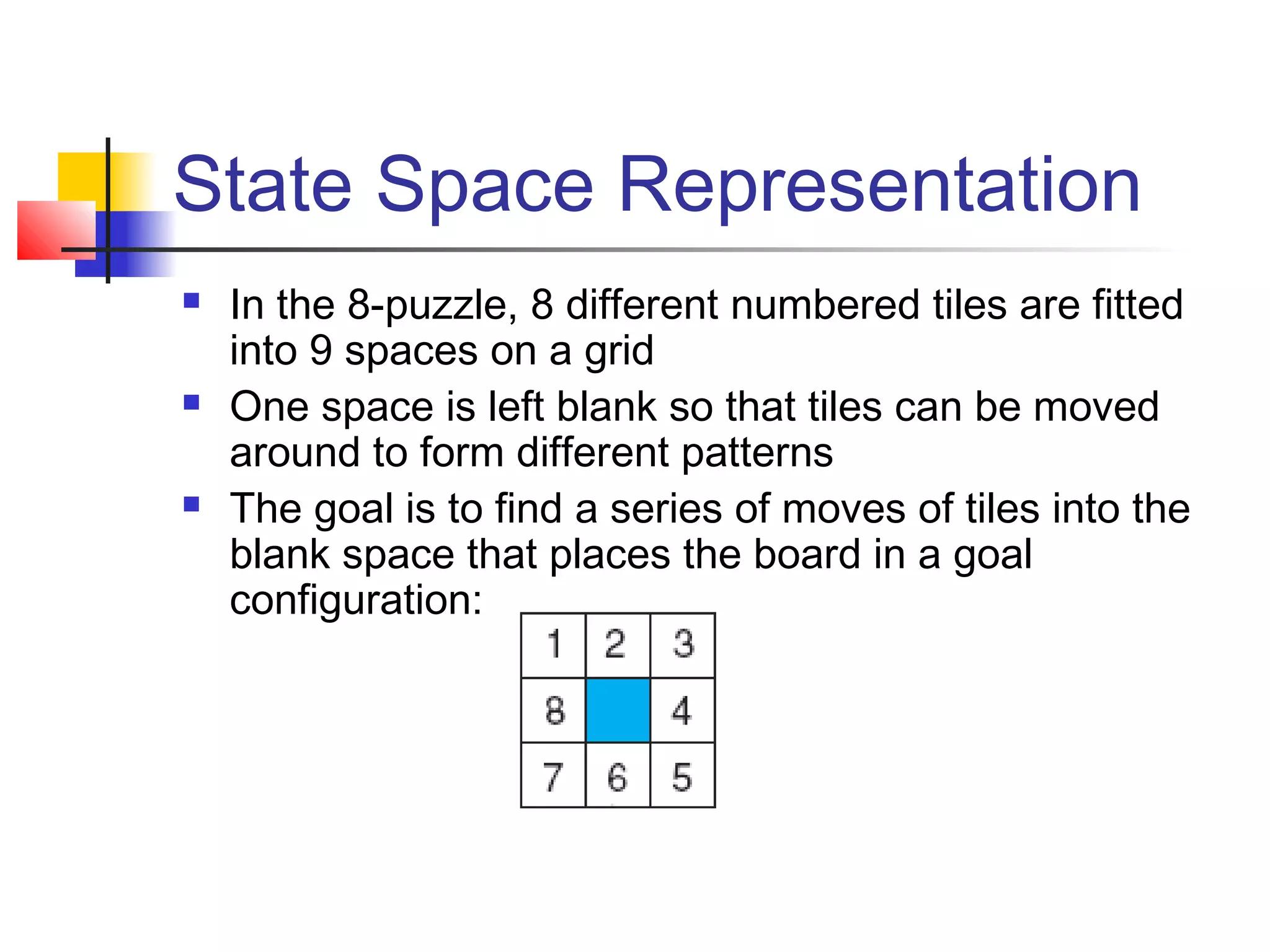
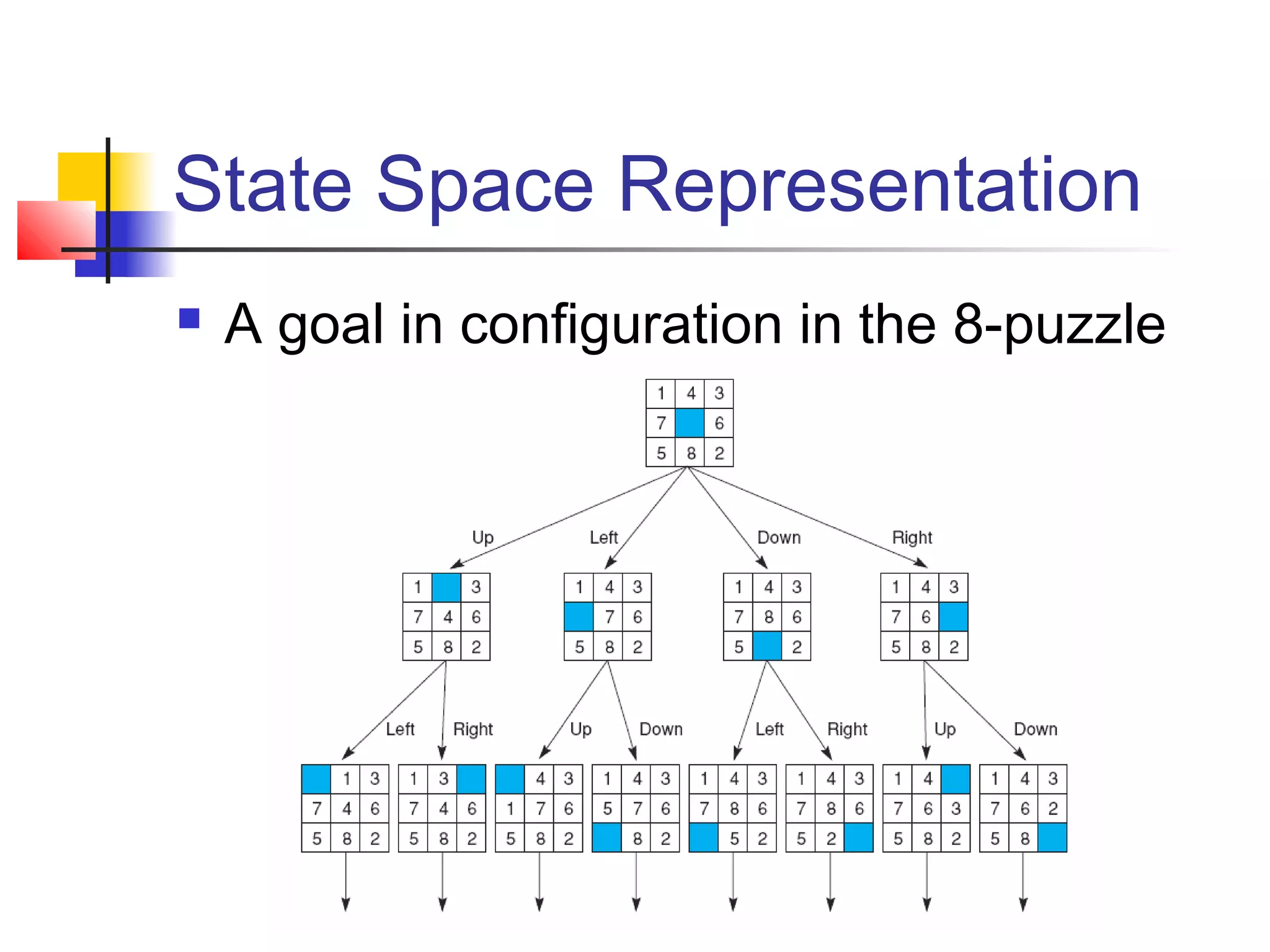
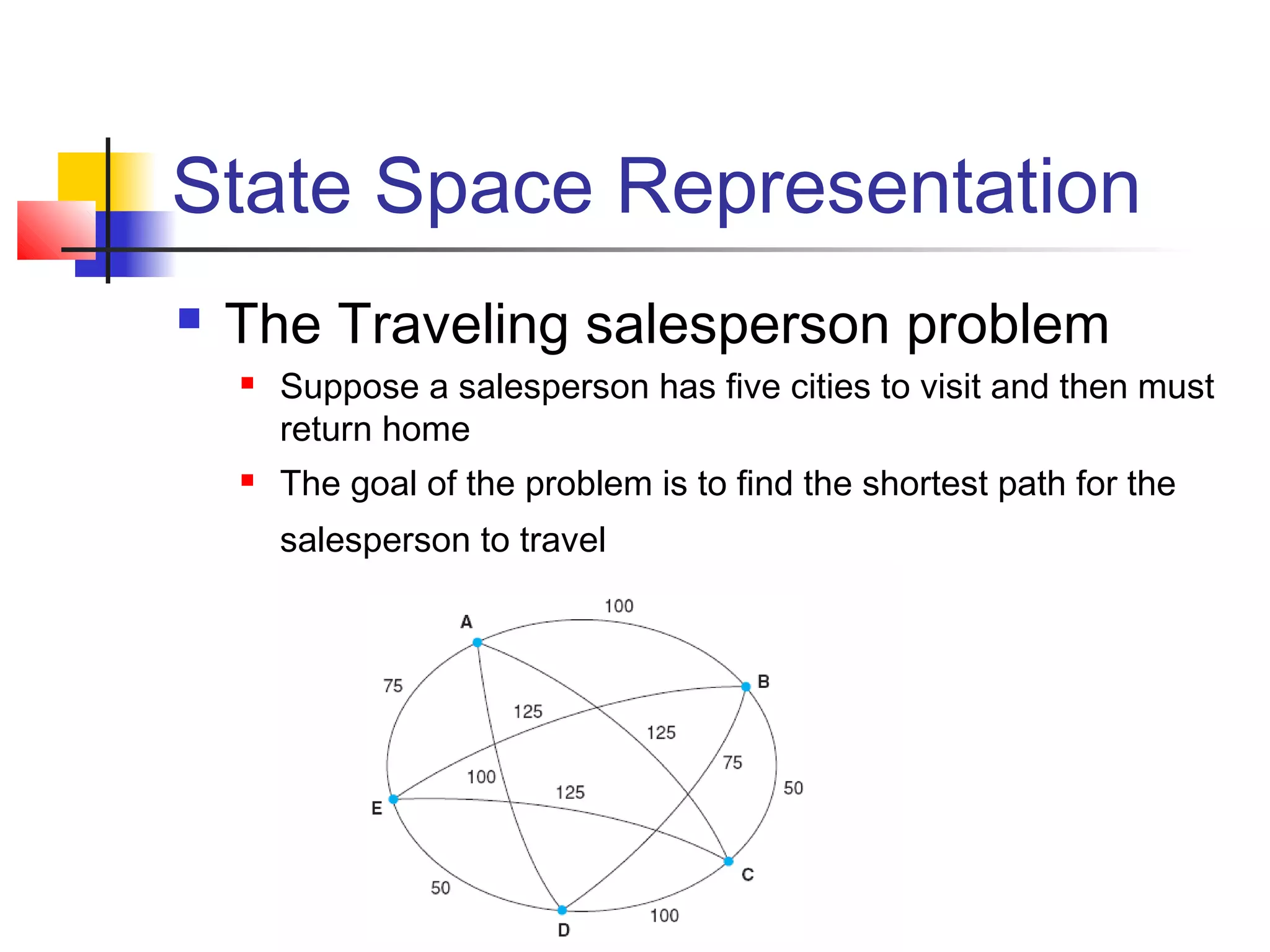
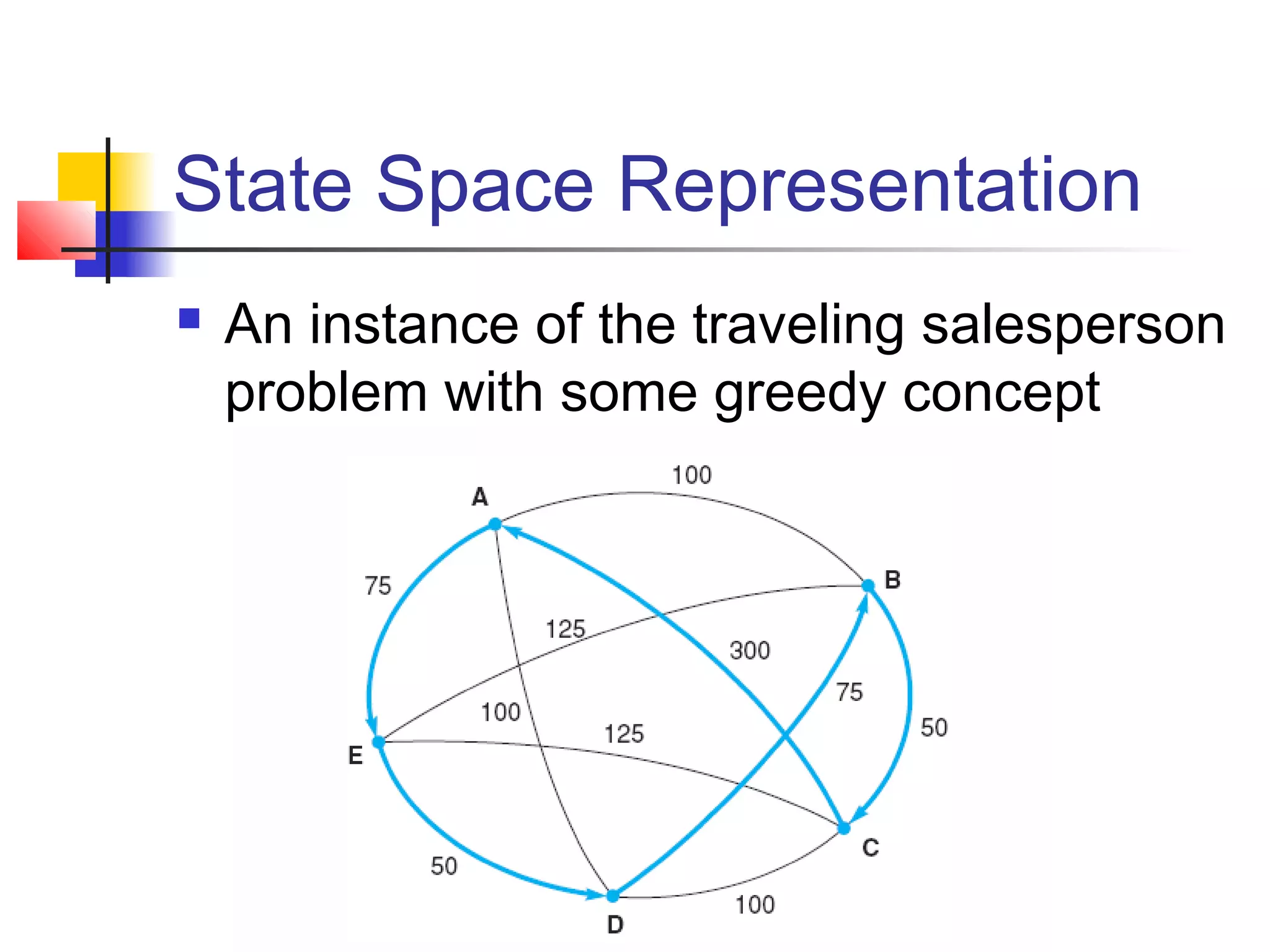
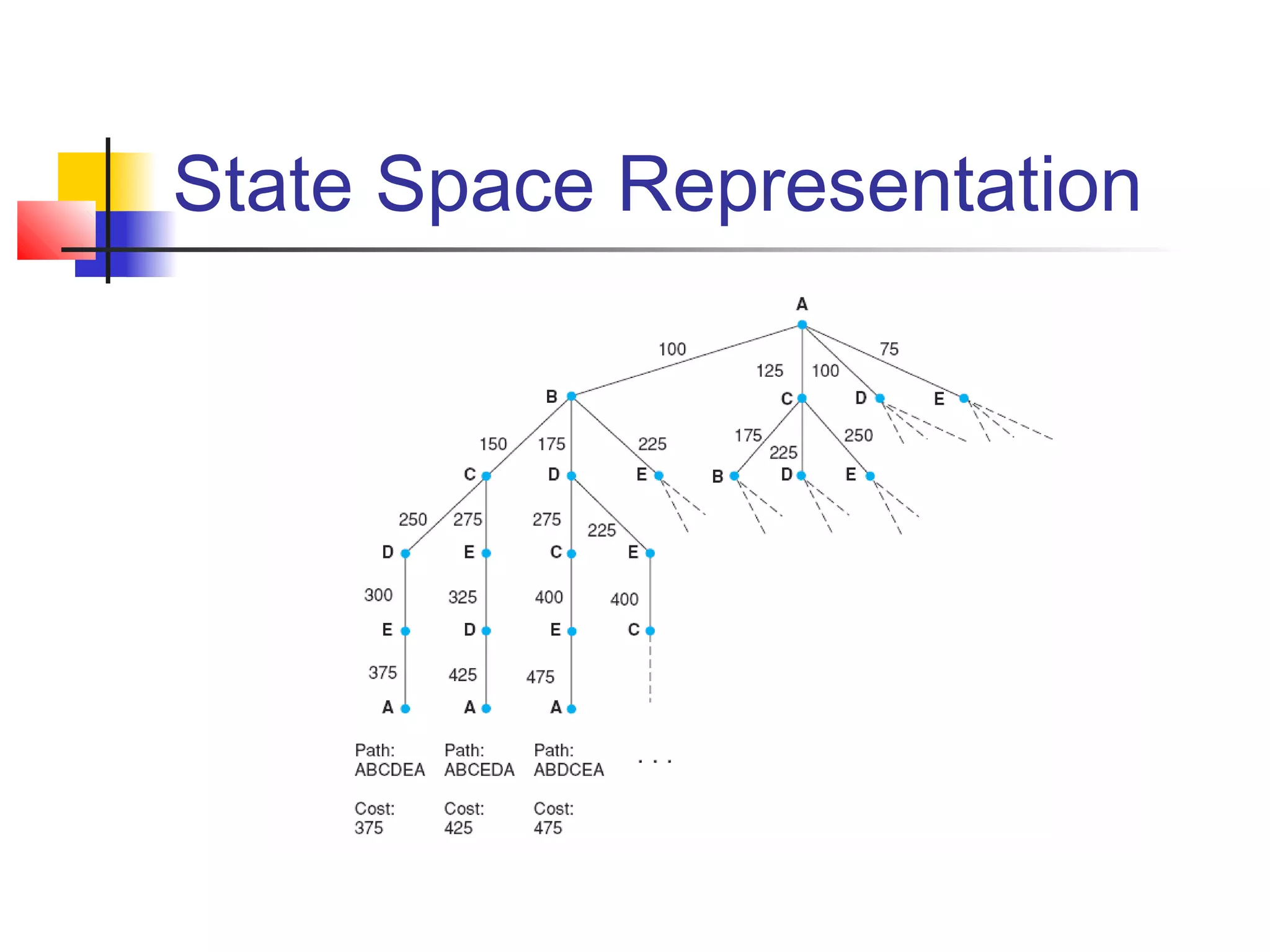
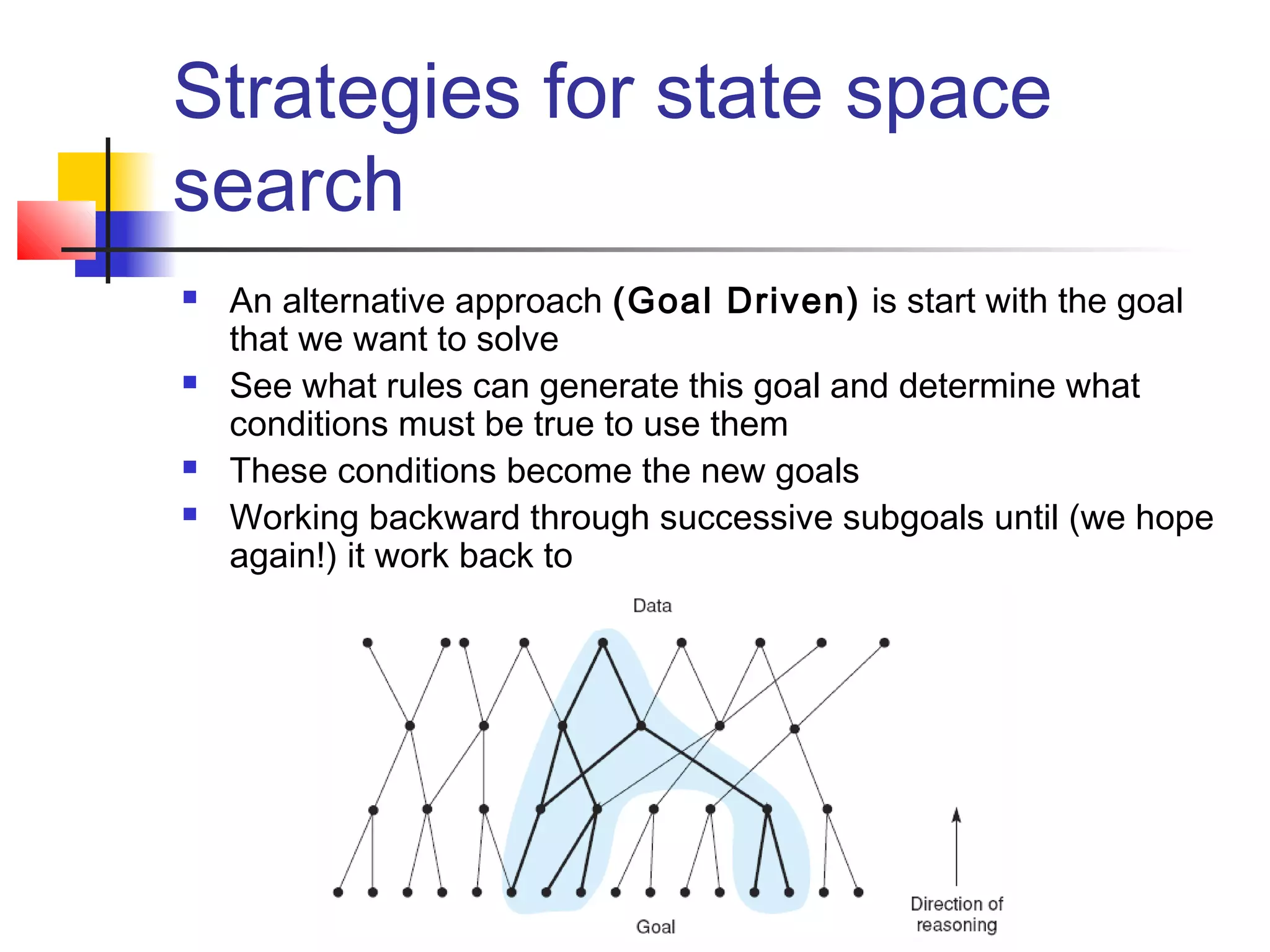

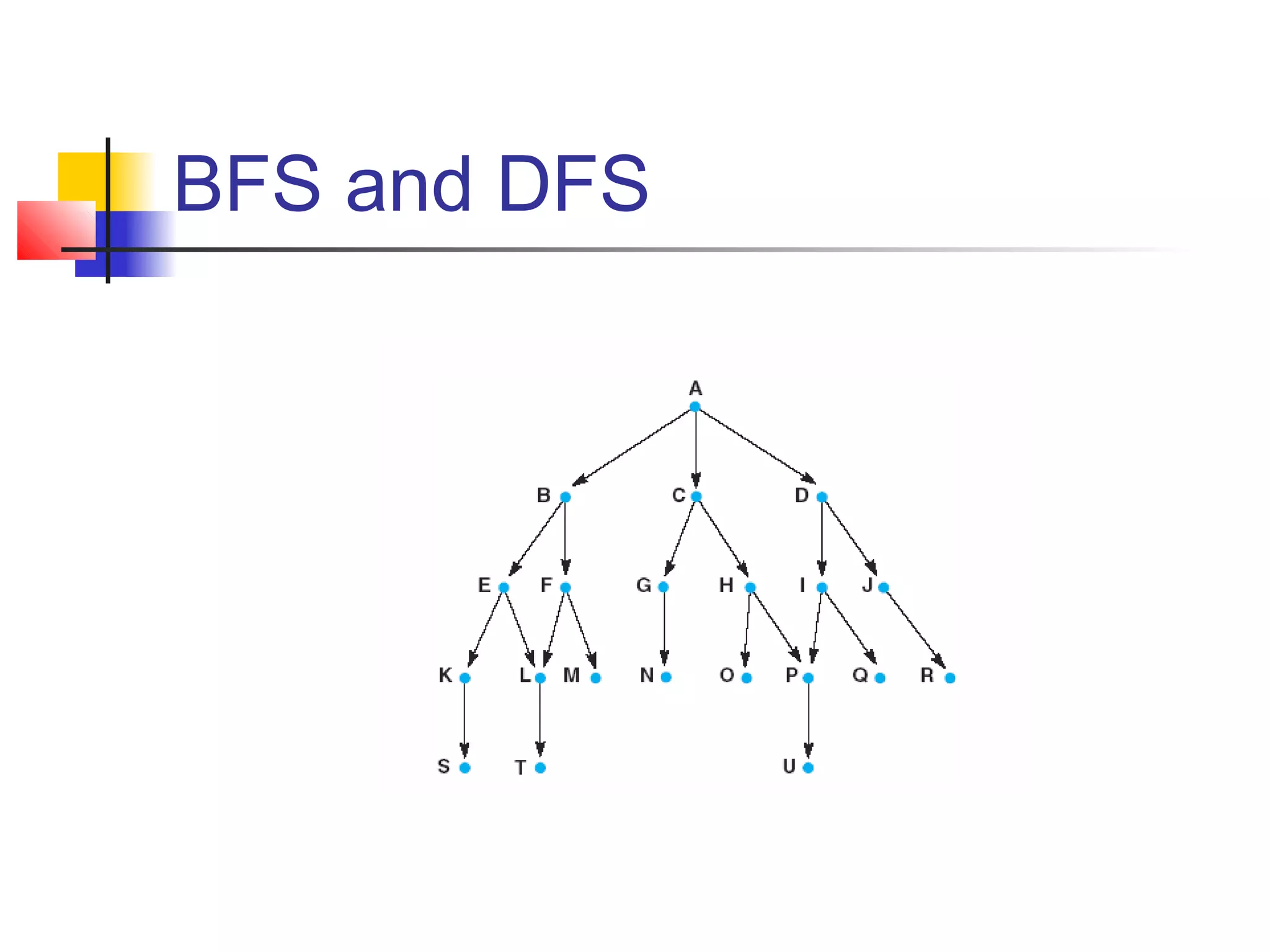

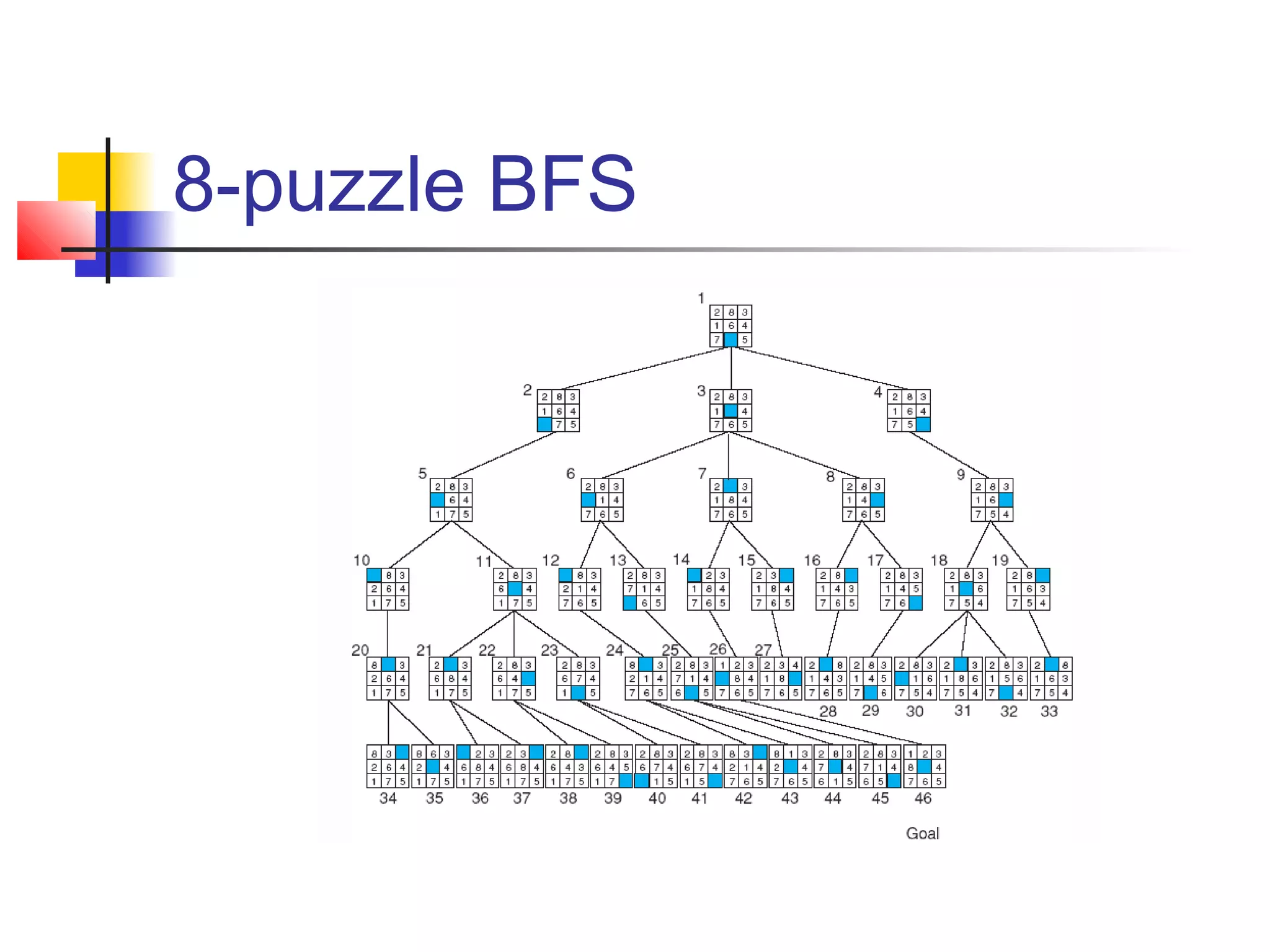
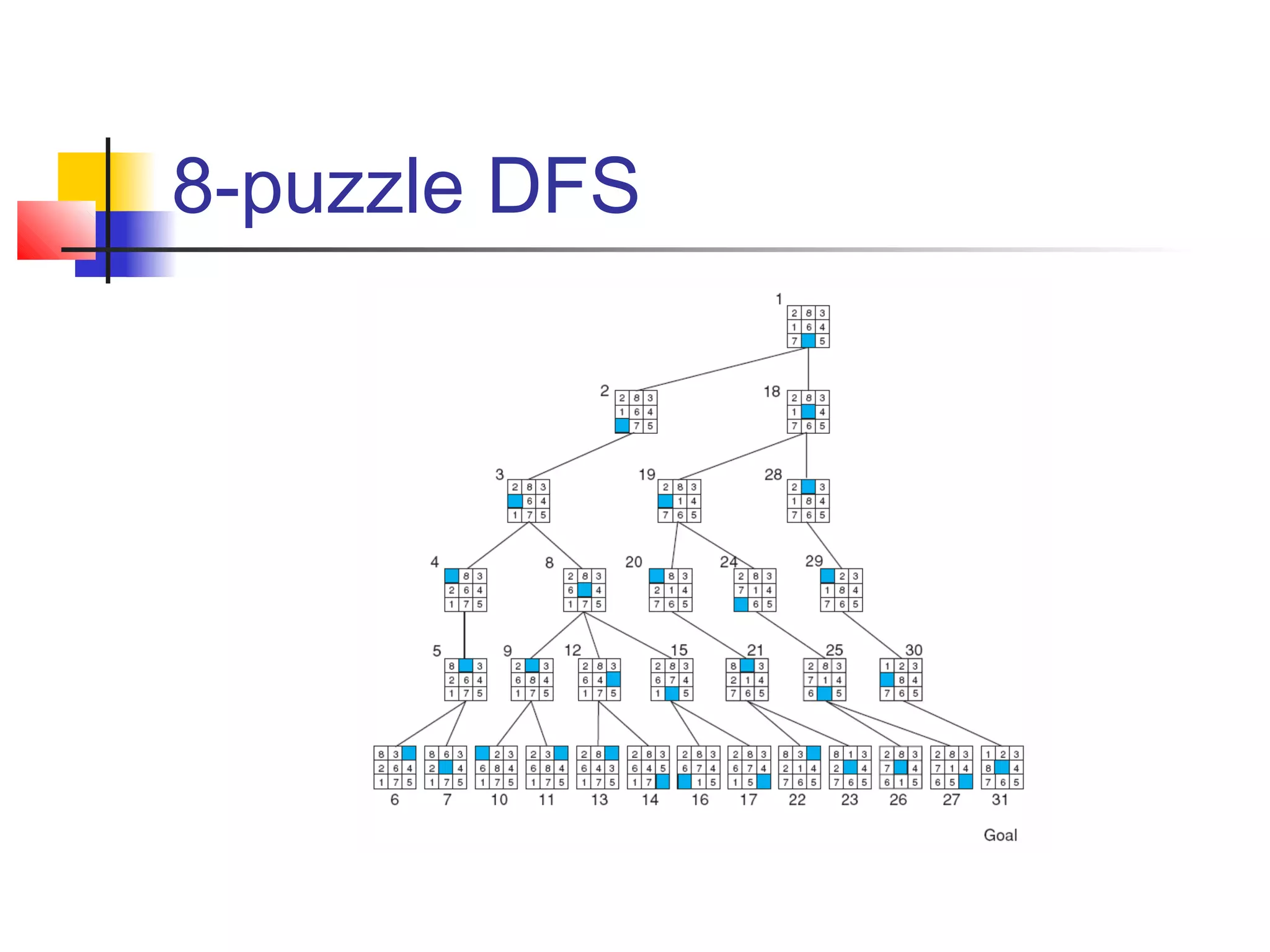
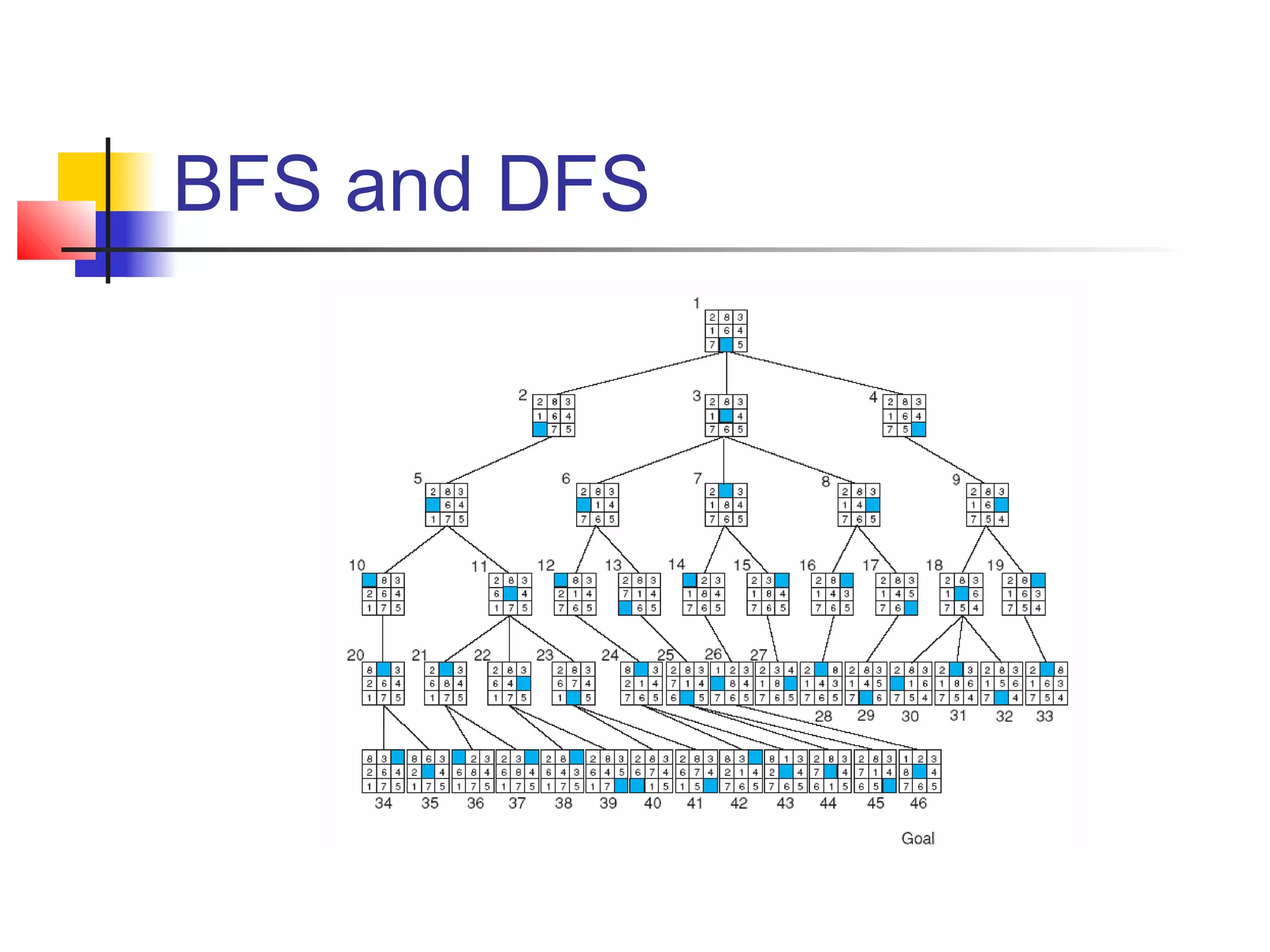

This document summarizes key concepts from a university lecture on artificial intelligence representation and search. It introduces representation as capturing problem features to enable problem solving. Search strategies like depth-first and breadth-first are then discussed, along with their properties and tradeoffs. State space graphs are used to represent problems, with nodes as states and edges as moves. Different problems like tic-tac-toe, the 8-puzzle, and traveling salesperson are provided as examples.