












![ Informed search strategies can find a solution more efficiently than an uninformed search
strategy. Informed search is also called a Heuristic search.
A heuristic is a way which might not always be guaranteed for best solutions but guaranteed
to find a good solution in reasonable time.
Informed search can solve much complex problem which could not be solved in another way.
An example of informed search algorithms is a traveling salesman problem.
1. Greedy Search
2. A* Search
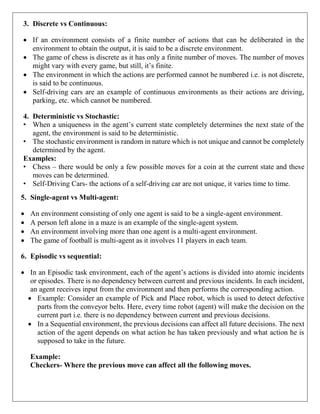
6. BREADTH-FIRST SEARCH (BFS):
Breadth-first search is the most common search strategy for traversing a tree or graph.
This algorithm searches breadthwise in a tree or graph, so it is called breadth-first search.
BFS algorithm starts searching from the root node of the tree and expands all successor
nodes at the current level before moving to nodes of next level.
The breadth-first search algorithm is an example of a general-graph search algorithm.
Breadth-first search implemented using FIFO queue data structure.
Algorithm:
• Step 1: SET STATUS = 1 (ready state) for each node in G
• Step 2: Enqueue the starting node A and set its STATUS = 2 (waiting state)
• Step 3: Repeat Steps 4 and 5 until QUEUE is empty
• Step 4: Dequeue a node N. Process it and set its STATUS = 3 (processed state).
• Step 5: Enqueue all the neighbours of N that are in the ready state (whose STATUS = 1)
and set
their STATUS = 2
(Waiting state)
[END OF LOOP]
• Step 6: EXIT
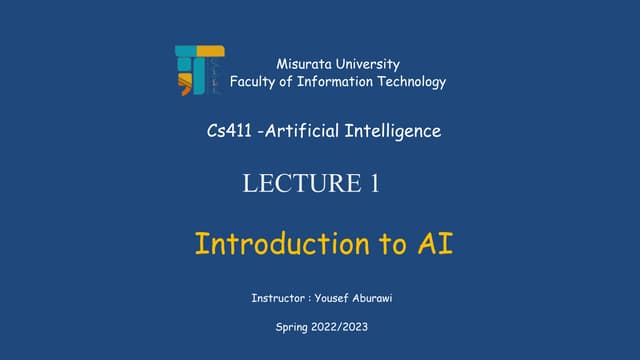
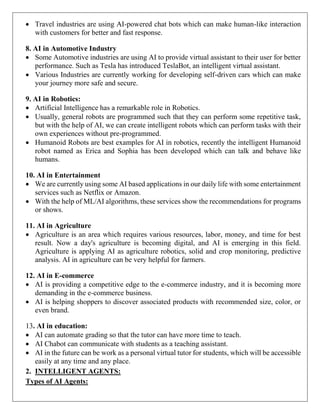
Example: 1
In the below tree structure, we have shown the traversing of the tree using BFS algorithm
from the root node S to goal node K. BFS search algorithm traverse in layers, so it will
follow the path which is shown by the dotted arrow, and the traversed path will be:](https://image.slidesharecdn.com/unitinotesmerged-240927194127-d374dc08/85/22PCOAM11-Unit-I-PDF-Full-Documentnotes-pdf-23-320.jpg)


![• Step 5: Push on the stack all the neighbors of N that are in the ready state (whose STATUS
= 1) and set their STATUS = 2 (waiting state)
[END OF LOOP]
• Step 6: EXIT
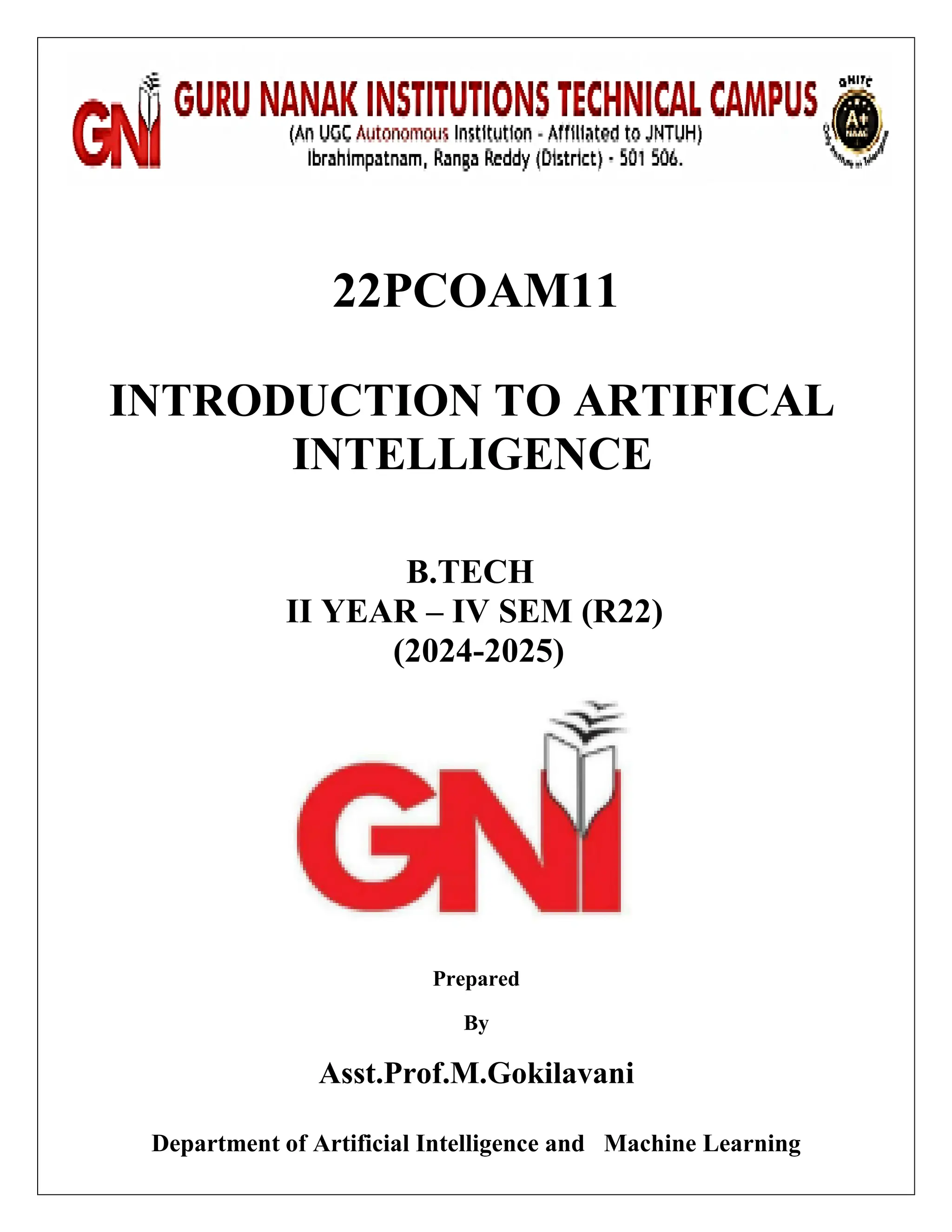
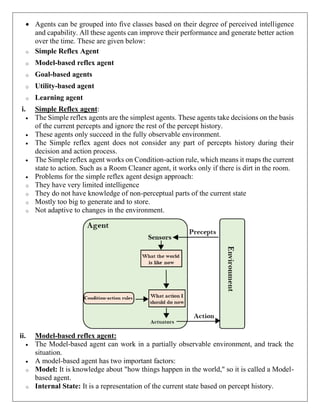
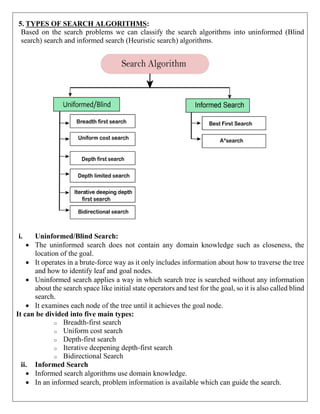
Example 1:
In the below search tree, we have shown the flow of depth-first search, and it will follow the order
as:
Root node--->Left node ----> right node.
It will start searching from root node S, and traverse A, then B, then D and E, after traversing E, it
will backtrack the tree as E has no other successor and still goal node is not found. After
backtracking it will traverse node C and then G, and here it will terminate as it found goal node.
=
Solution: S,A,B,D,E,C,G,H,I,K,J.](https://image.slidesharecdn.com/unitinotesmerged-240927194127-d374dc08/85/22PCOAM11-Unit-I-PDF-Full-Documentnotes-pdf-27-320.jpg)


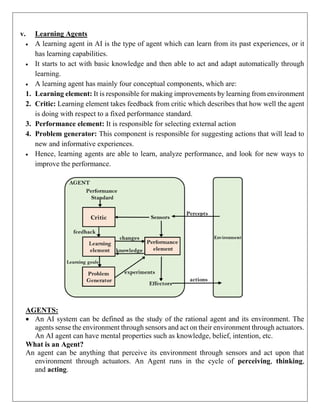
![1.Simple Hill Climbing:
Simple hill climbing is the simplest way to implement a hill climbing algorithm.
It only evaluates the neighbor node state at a time and selects the first one
whichoptimizes current cost and set it as a current state.
It only checks it's one successor state, and if it finds better than the current state,
then moveelse be in the same state.
This algorithm has the following features:
o Less time consuming
o Less optimal solution and the solution is not guaranteed
Algorithm for Simple Hill Climbing:
o Step 1: Evaluate the initial state, if it is goal state then return success and Stop.
o Step 2: Loop Until a solution is found or there is no new operator left to apply.
o Step 3: Select and apply an operator to the current state.
o Step 4: Check new state:
a. If it is goal state, then return success and quit.
b. Else if it is better than the current state then assign new state as a current state.
c. Else if not better than the current state, then return to step2.
o Step 5: Exit.]
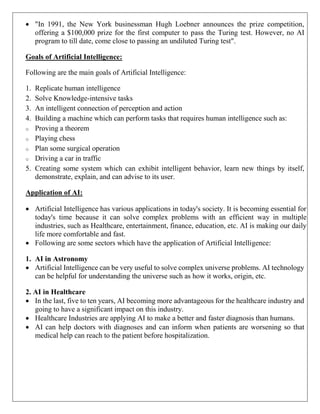
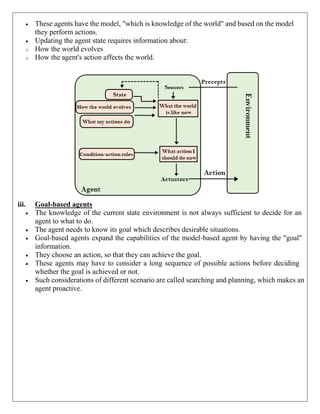
Example:
• Key point while solving any hill-climbing problem is to choose an
appropriate heuristic function.
• Let's define such function h:
• h (x) = +1 for all the blocks in the support structure if the block is correctly
positioned otherwise -1 for all the blocks in the support structure.](https://image.slidesharecdn.com/unitinotesmerged-240927194127-d374dc08/85/22PCOAM11-Unit-I-PDF-Full-Documentnotes-pdf-32-320.jpg)






The document outlines the syllabus for an Introduction to Artificial Intelligence course for B.Tech students, detailing course objectives, outcomes, and various topics covered, including intelligent agents, search algorithms, games, logic, planning, and probabilistic reasoning. It discusses the significance of AI in numerous sectors such as healthcare, finance, and robotics, and highlights the historical context of AI, including the Turing Test and the goals it aims to achieve. The course also emphasizes the development of different types of AI agents and their applications across various industries.