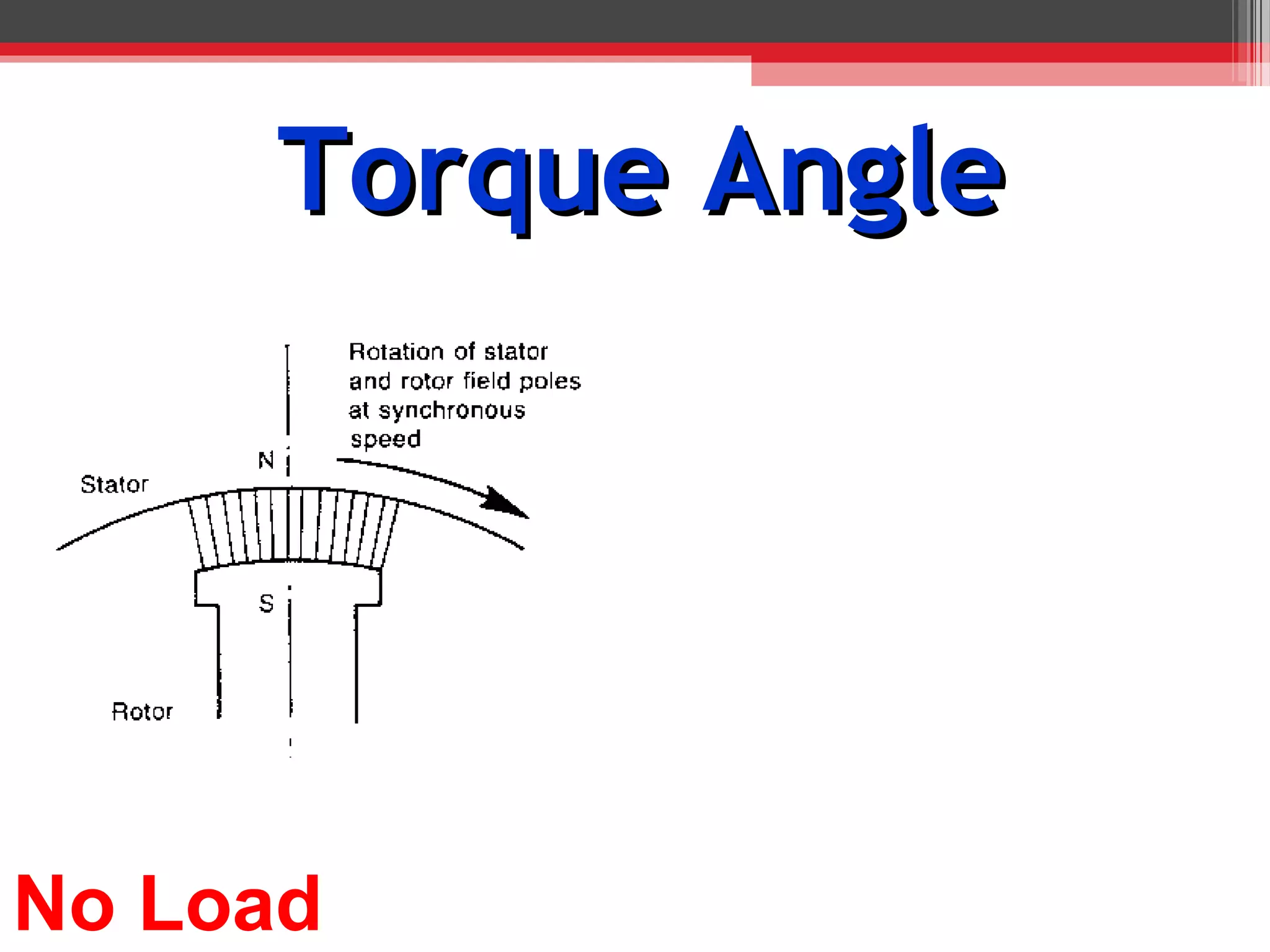
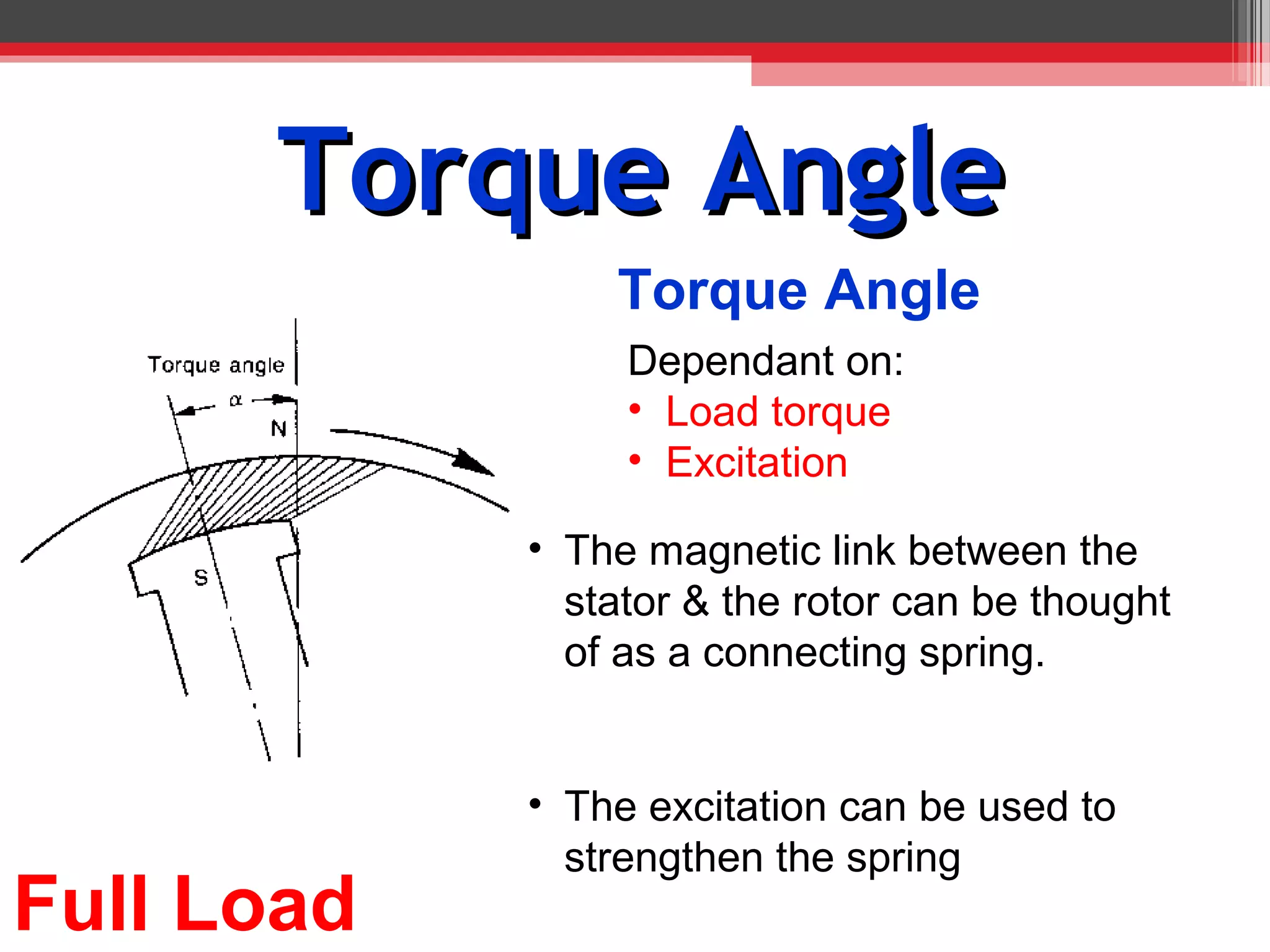
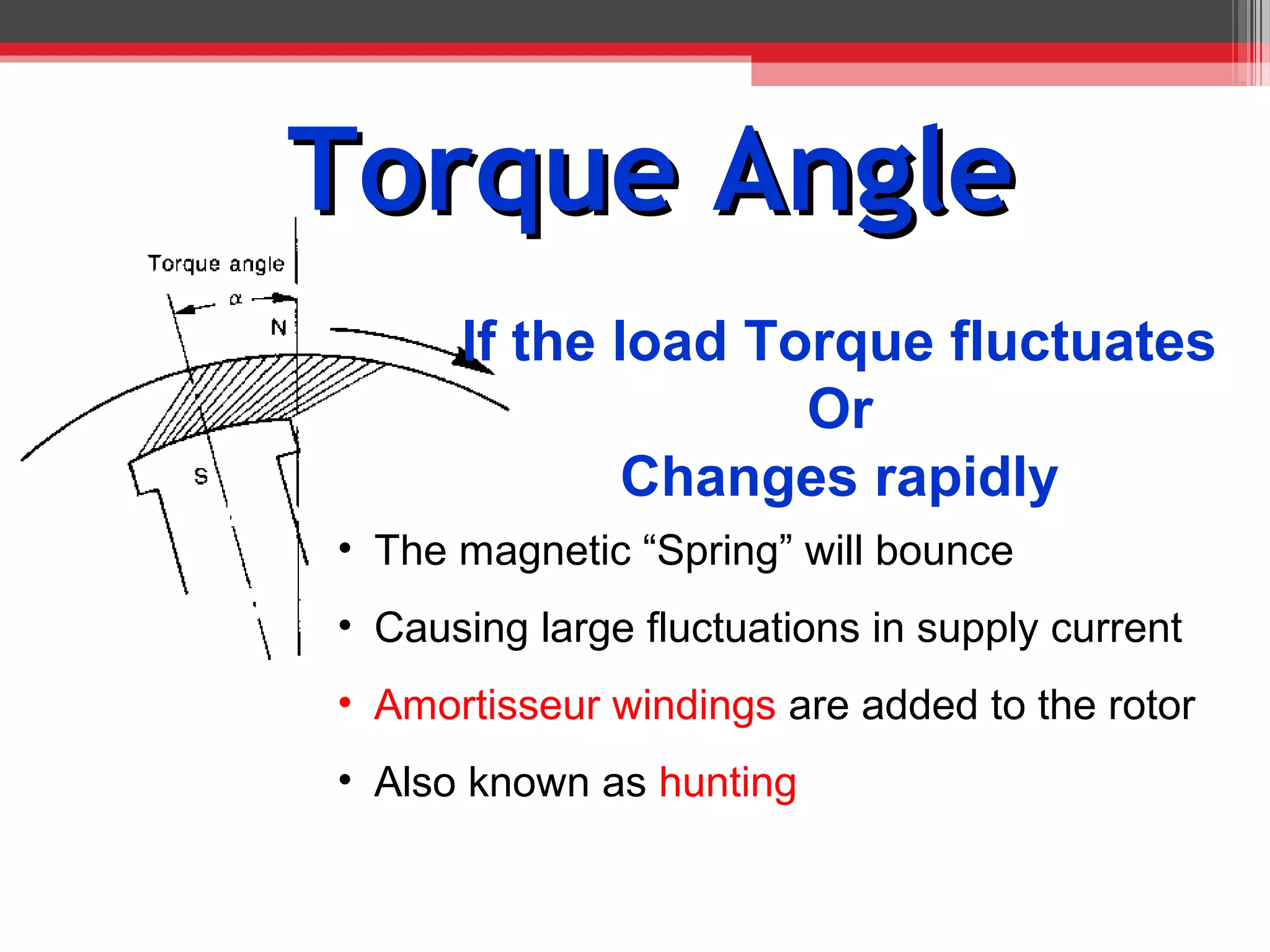
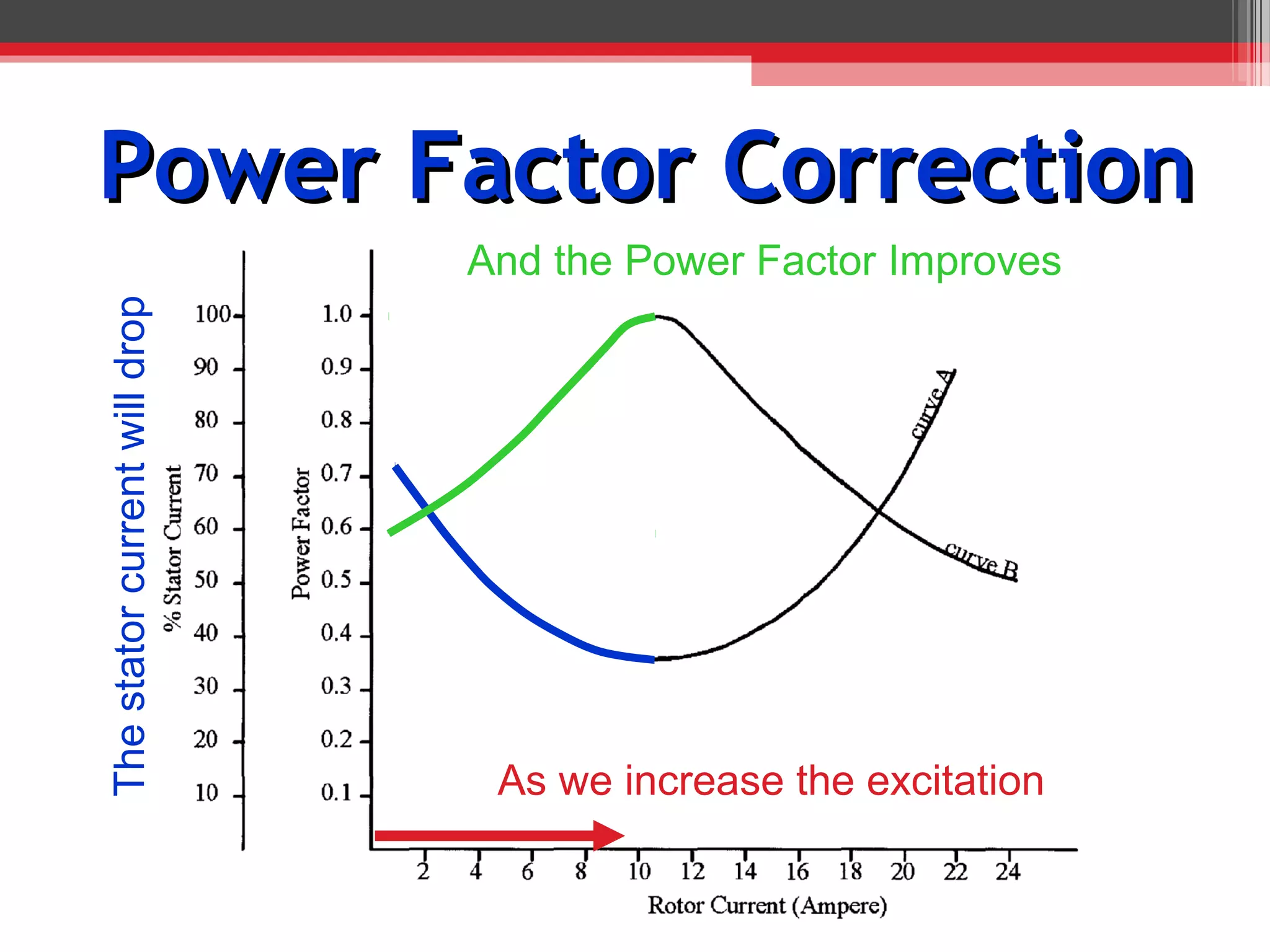
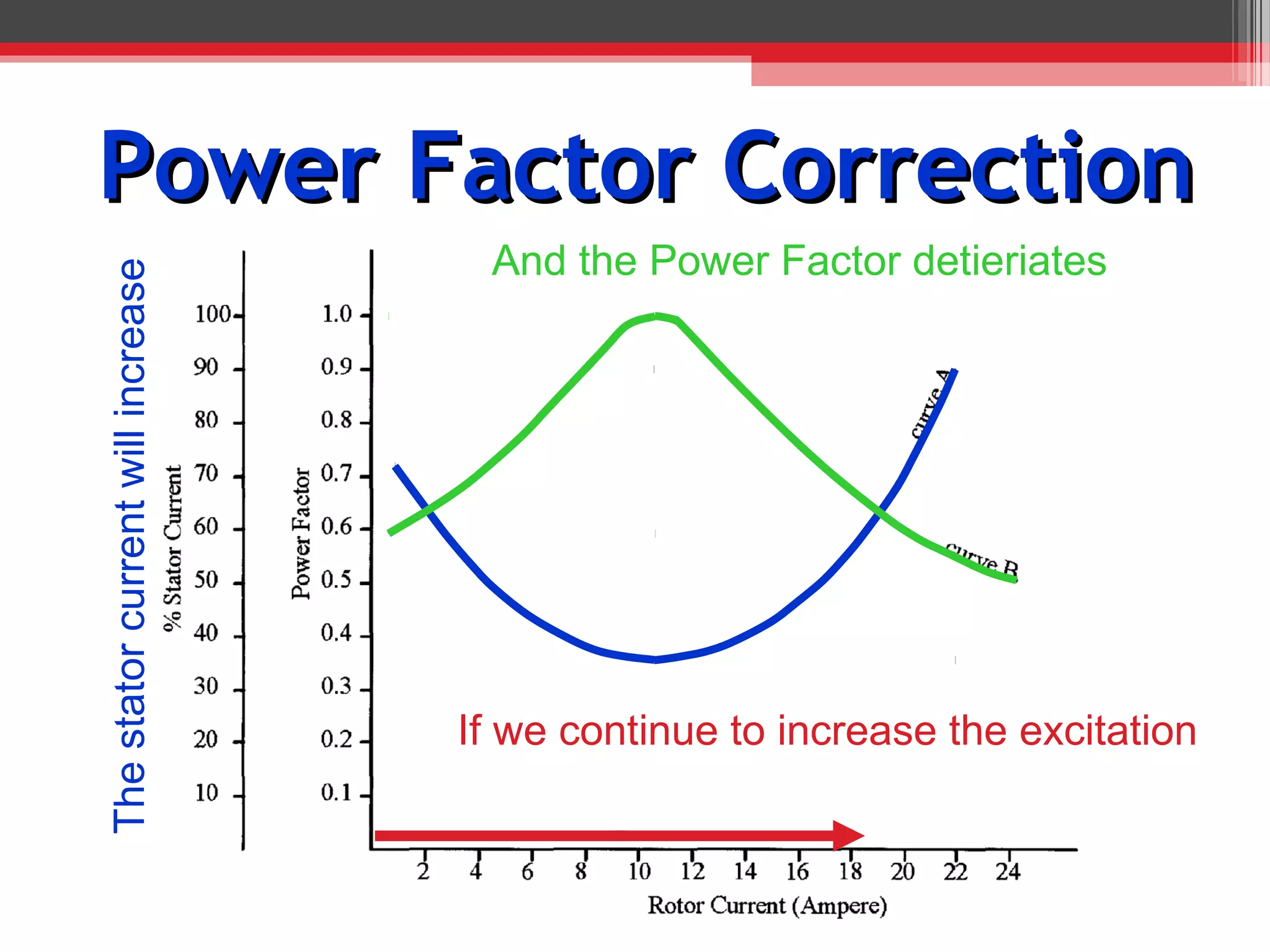
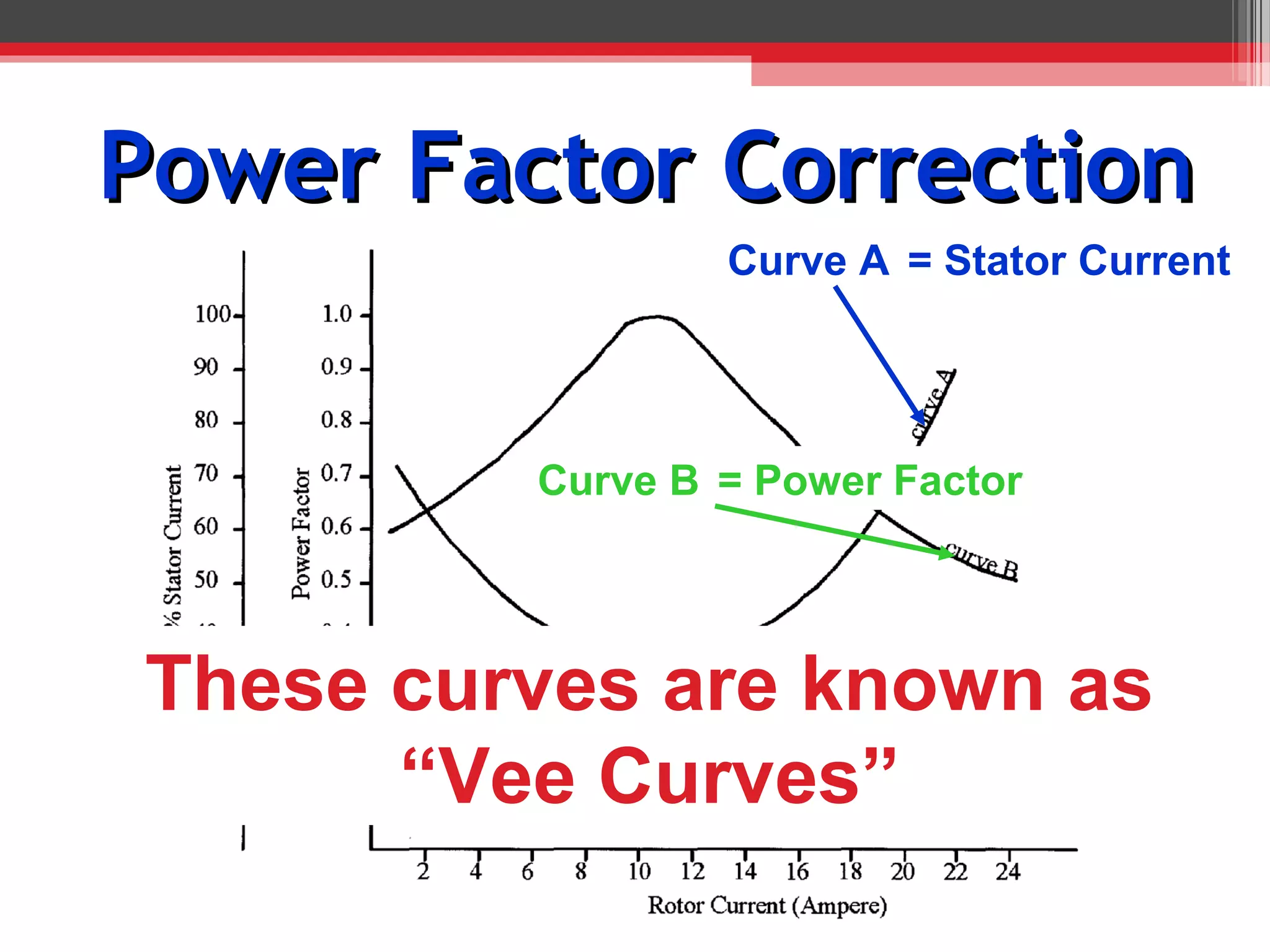
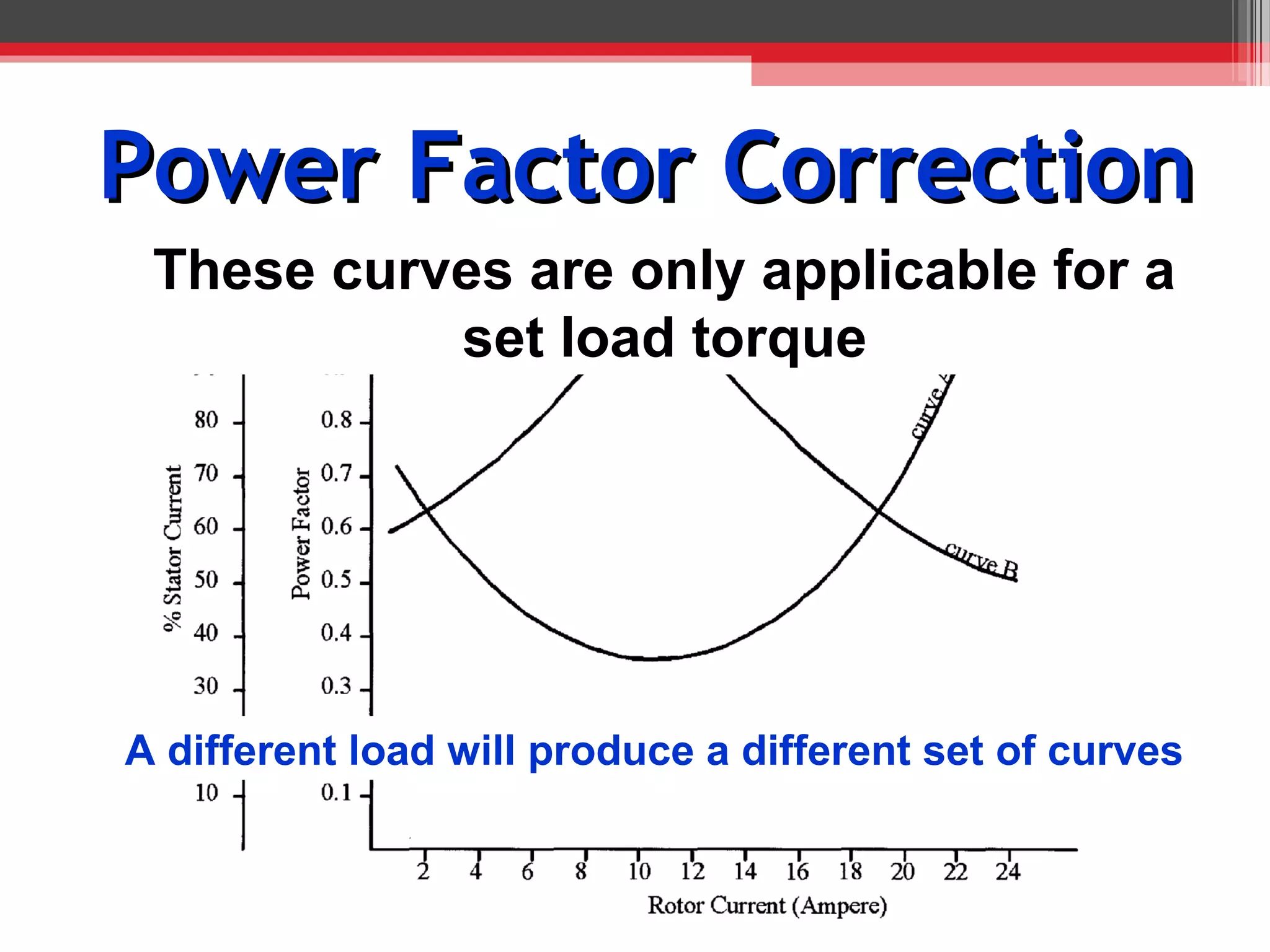
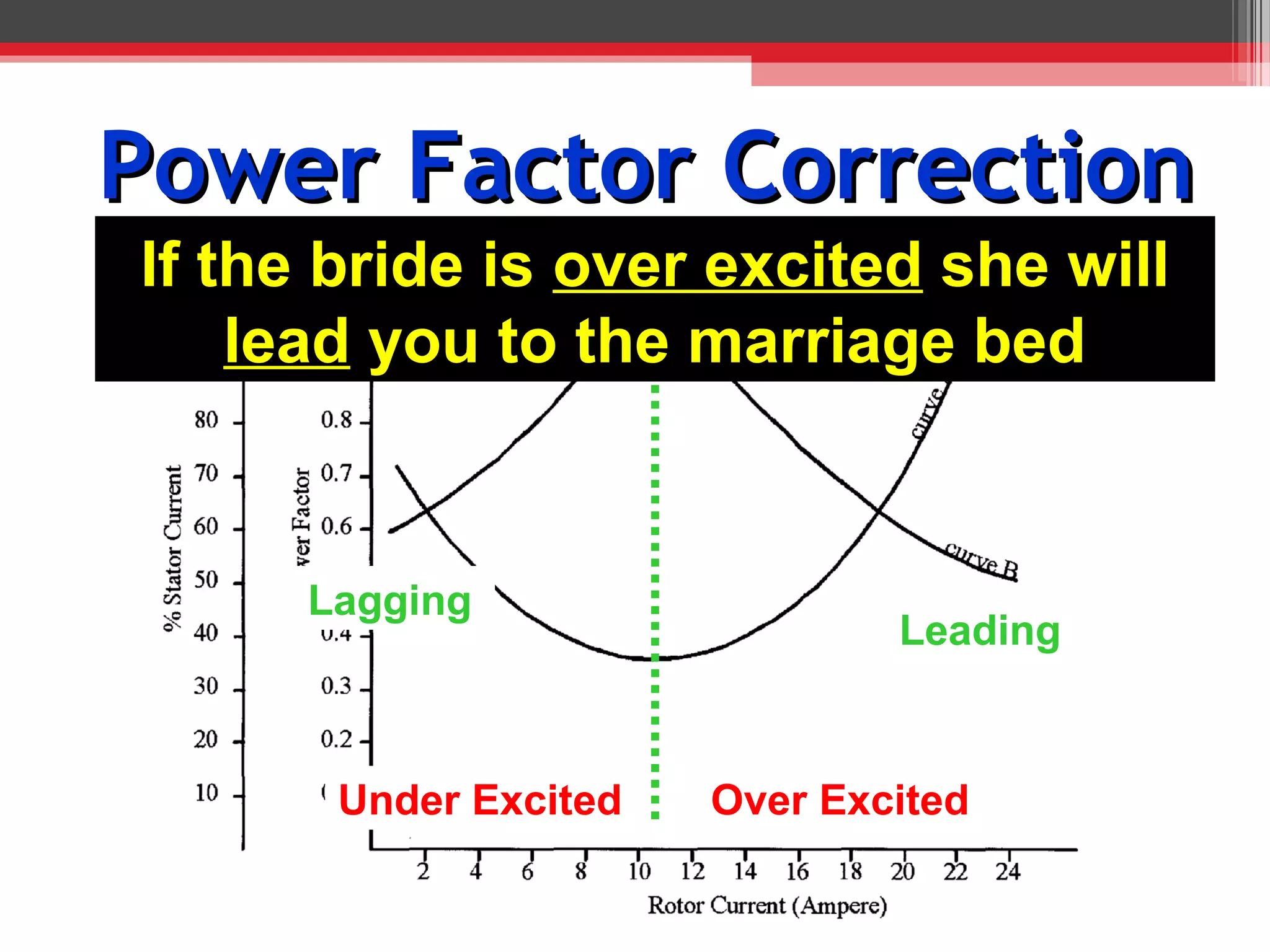
Synchronous motors operate at a constant synchronous speed determined by the number of poles and frequency of the power supply. They have high efficiency and provide smooth constant torque but are more expensive than induction motors. The rotor is either wound similarly to an induction motor or contains permanent magnets. Methods to provide starting torque include using a pony motor, applying a reduced voltage and frequency to the rotor windings to make it operate like an induction motor initially, or using damper windings. Synchronous motors are commonly used for power factor correction by varying the field excitation to control the phase relationship between voltage and current.