Download to read offline



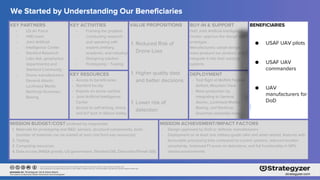
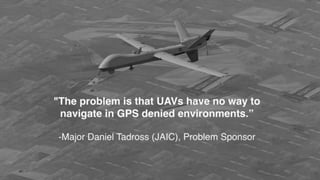
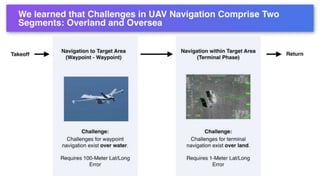

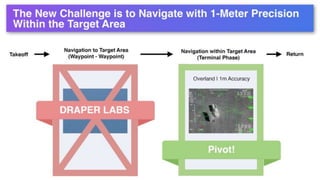


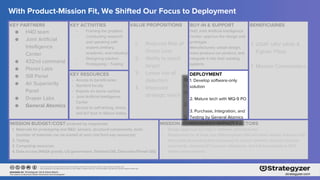

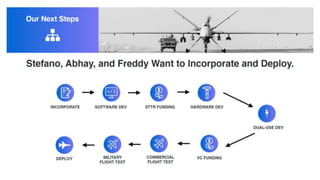


The document outlines a business pivot focusing on waypoint navigation for UAVs, emphasizing the need for prototyping, testing, and deployment strategies in collaboration with key partners and resources. It includes details on budget allocation, beneficiaries, and mission achievement factors, aiming for improved UAV capabilities and reduced risks. The team plans to continue development and pursue funding options for the project's deployment over the next year.























































































