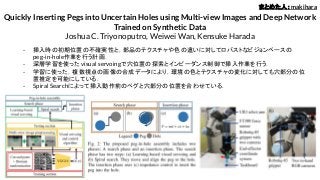
Quickly Inserting Pegsinto Uncertain Holes using Multi-view Images and Deep Network
Trained on Synthetic Data
Joshua C. Triyonoputro, Weiwei Wan, Kensuke Harada
- 挿入時の初期位置の不確実性と,部品のテクスチャや色の違いに対してロバストなビジョンベースの
peg-in-hole作業を行う計画.
- 深層学習を使ったvisual servoingで穴位置の探索とインピーダンス制御で挿入作業を行う.
- 学習に使った,複数視点の画像の合成データにより,環境の色とテクスチャの変化に対しても穴部分の位
置推定を可能にしている.
- Spiral Searchによって挿入動作前のペグと穴部分の位置を合わせている.
まとめた人:makihara
4.
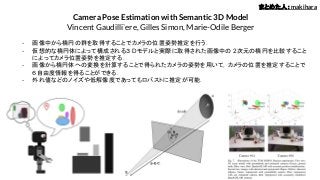
Camera Pose Estimationwith Semantic 3D Model
Vincent Gaudilli`ere, Gilles Simon, Marie-Odile Berger
- 画像中から楕円の群を取得することでカメラの位置姿勢推定を行う.
- 仮想的な楕円体によって構成される3 Dモデルと実際に取得された画像中の 2次元の楕円を比較すること
によってカメラ位置姿勢を推定する.
- 画像から楕円体への変換を計算することで得られたカメラの姿勢を用いて,カメラの位置を推定することで
6自由度情報を得ることができる.
- 外れ値などのノイズや低解像度であってもロバストに推定が可能.
まとめた人:makihara
5.
Hand-eye calibration witha remote centre of motion
Krittin Pachtrachai, Francisco Vasconcelos, George Dwyer, Stephen Hailes and Danail
Stoyanov- Remote center of motion(遠隔運動中心)をもつ外科手術ロボットのための手先カメラキャリブレーション手
法の提案.
- 自由度の制約がある中でもキャリブレーションが可能であり,精度も既存手法より高いことから,広い範囲
で使うことのできない一般的なロボットに対しても適用可能.
- 取得されたグリッドパターンから RCMの位置姿勢を導出し,姿勢のしきい値を 5[deg]として,制約付き非線
形最適化問題を解くことによって補正を行なっている.
まとめた人:makihara
6.
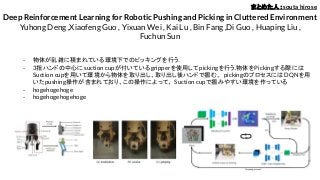
Deep Reinforcement Learningfor Robotic Pushing and Picking in Cluttered Environment
Yuhong Deng ,Xiaofeng Guo , Yixuan Wei , Kai Lu , Bin Fang ,Di Guo , Huaping Liu ,
Fuchun Sun
- 物体が乱雑に積まれている環境下でのピッキングを行う.
- 3指ハンドの中心にsuction cupが付いているgripperを使用してpickingを行う.物体をPickingする際には
Suction cupを用いて環境から物体を取り出し、取り出し後ハンドで掴む。 pickingのプロセスにはDQNを用
いたpushing操作が含まれており、この操作によって、 Suction cupで掴みやすい環境を作っている
- hogehogehoge
- hogehogehogehoge
まとめた人:souta hirose
7.
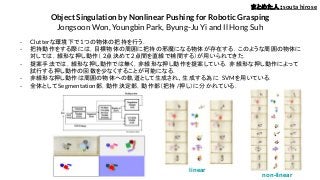
Object Singulation byNonlinear Pushing for Robotic Grasping
Jongsoon Won, Youngbin Park, Byung-Ju Yi and Il Hong Suh
- Clutterな環境下で1つの物体の把持を行う.
- 把持動作をする際には,目標物体の周囲に把持の邪魔になる物体が存在する.このような周囲の物体に
対しては,線形な押し動作( 2点決めて2点間を直線で補間する)が用いられてきた.
- 提案手法では,線形な押し動作では無く,非線形な押し動作を提案している.非線形な押し動作によって
試行する押し動作の回数を少なくすることが可能になる.
- 非線形な押し動作は周囲の物体への軌道として生成され、生成する為に SVMを用いている.
- 全体としてSegmentation部,動作決定部,動作部(把持 /押し)に分かれている.
まとめた人:souta hirose
linear
non-linear
8.
Robust Grasp PlanningOver Uncertain Shape Completions
Jens Lundell, Francesco Verdoja and Ville Kyrki
- 形状が不確かな物体に対するロバストな把持計画手法の提案.
- アプローチ方法としては Point CloudをCNNに入れて形状を補間する方法を使用
- Simulation及び実機での結果において、形状の不確かさが存在することにより,把持の成功率が上がった
とのこと.
まとめた人:souta hirose

![Hand-eye calibration with a remote centre of motion
Krittin Pachtrachai, Francisco Vasconcelos, George Dwyer, Stephen Hailes and Danail
Stoyanov- Remote center of motion(遠隔運動中心)をもつ外科手術ロボットのための手先カメラキャリブレーション手
法の提案.
- 自由度の制約がある中でもキャリブレーションが可能であり,精度も既存手法より高いことから,広い範囲
で使うことのできない一般的なロボットに対しても適用可能.
- 取得されたグリッドパターンから RCMの位置姿勢を導出し,姿勢のしきい値を 5[deg]として,制約付き非線
形最適化問題を解くことによって補正を行なっている.
まとめた人:makihara](https://image.slidesharecdn.com/total20200407-20200412-200414105132/85/Pre-Survey-2020-04-07-2020-04-12-5-320.jpg?cb=1586861593)