More Related Content

PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis... 
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR... 
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process 
PDF
2024 State of Marketing Report – by Hubspot 
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing 
PDF

PDF
学際領域研究者のたまごが思うこと10選-認知, 神経, 人工知能の視点から- 全脳アーキテクチャ若手の会 第19回勉強会 カジュアルトーク 
PPTX
全脳アーキテクチャ勉強会若手の会実現に向けて E-cell sprint 2014 Featured

PDF
Everything You Need To Know About ChatGPT 
PDF
Product Design Trends in 2024 | Teenage Engineerings 
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health 
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf 
PDF

PDF
PEPSICO Presentation to CAGNY Conference Feb 2024 
PDF
Content Methodology: A Best Practices Report (Webinar) 
PPTX
How to Prepare For a Successful Job Search for 2024 
PDF
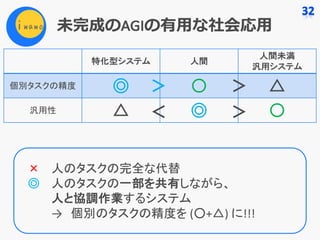
Social Media Marketing Trends 2024 // The Global Indie Insights 
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024 
PDF
5 Public speaking tips from TED - Visualized summary 
PDF
ChatGPT and the Future of Work - Clark Boyd 
PDF
Getting into the tech field. what next 
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent 
PDF
How to have difficult conversations 
PDF
Introduction to Data Science 
PDF
Time Management & Productivity - Best Practices 
PDF
The six step guide to practical project management 
PDF
Beginners Guide to TikTok for Search - Rachel Pearson - We are Tilt __ Bright... 
PDF
Unlocking the Power of ChatGPT and AI in Testing - A Real-World Look, present... 全脳アーキテクチャ若手の会 第24回勉強会 カジュアルトーク 大澤発表資料
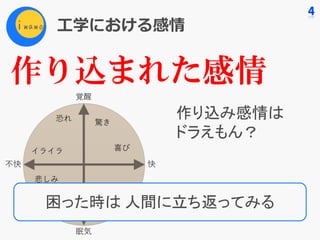
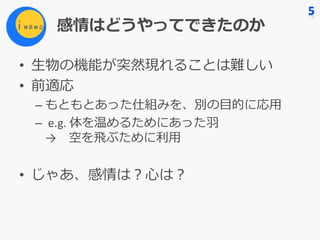
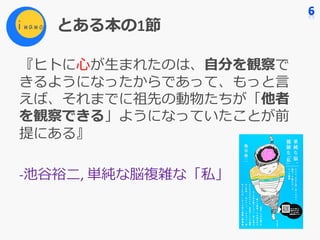
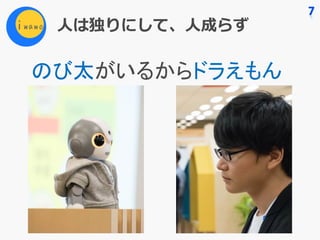
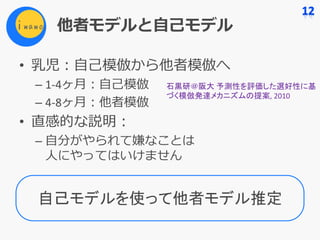
- 1.
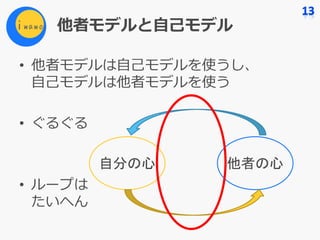
- 2.
- 3.
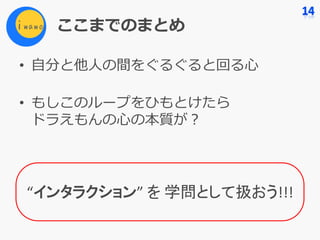
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
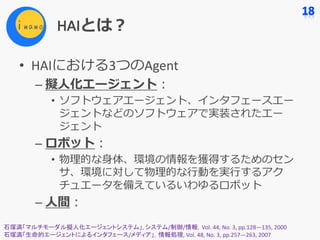
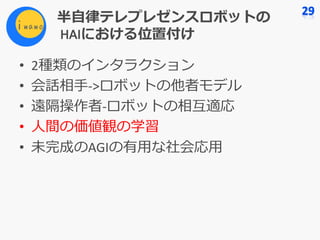
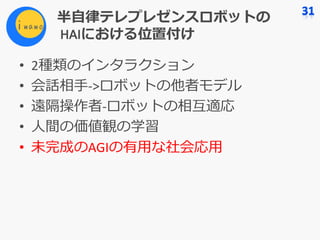
HAIとは?
• HAIにおける3つのAgent
– 擬⼈化エージェント:
•ソフトウェアエージェント、インタフェースエー
ジェントなどのソフトウェアで実装されたエー
ジェント
– ロボット:
• 物理的な⾝体、環境の情報を獲得するためのセン
サ、環境に対して物理的な⾏動を実⾏するアク
チュエータを備えているいわゆるロボット
– ⼈間:
石塚満「マルチモーダル擬人化エージェントシステム」, システム/制御/情報,Vol. 44, No. 3, pp.128—135, 2000
石塚満「生命的エージェントによるインタフェース/メディア」,情報処理, Vol. 48, No. 3, pp.257—263, 2007
- 19.
- 20.
- 21.
- 22.
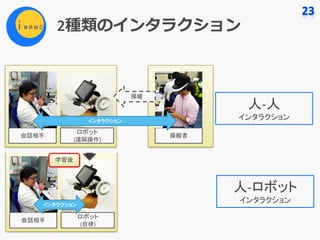
- 23.
- 24.
- 25.
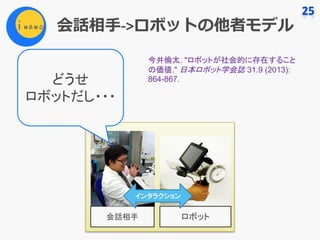
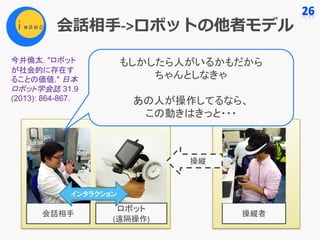
- 26.
- 27.
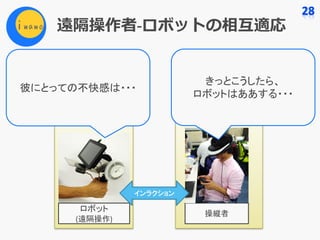
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
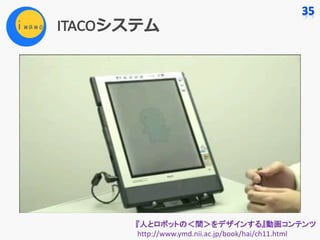
- 35.
- 36.