4. Fig 4 Organizational structure diagram of individual robotic software modules
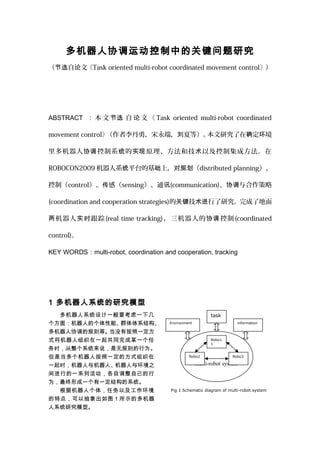
Fig 5 Schematic diagram of the behavior-based control of robotics
Telecommunicati
on
Command
Tasks
Behavior
Arbiter
Target
Info.
Obstacles
Info.
Coordinate
Info.
Part path
planning
Tracking
algorithm
Movement
controller
Electrical
machine
Arbiter
Obstacle
testing 1
Obstacle
testing 2
Obstacle
testing 3
Laser
device
Ultrasoni
c device
Infrared
device
Arbiter
Overall
location
systems
Part
location
systems
STARGAZER
indoor locating
system
Digital
compa
ss
Coded
disc.
5. 5 多机器人的协调控制系统
两机器人的编队跟踪问题,我们采用
虚拟领队(virtual leading)和编队跟踪控
制方法。虚拟领队机器人编队的几何关系是
由虚拟领队机器人与跟最机器人之间的相
对位置确定的。如图 6 所示。
多机器人编队完成特定任务是机器人
协调系统的典型任务。本实验采用了多机器
人编队控制策略,由文【3】知,我们利用在
行为融合中采用各行为适量的加权求和算
法。如图 所示, ∑= iiUWU0 式中 0U
为运动控制器矢量, iW 为权系数, iU
为子行为输出矢量, ...3,2,1=i 。在存在
障碍物环境的多机器人编队控制实验中,
通过利用以太网(ethernet)传递定位信息
和超声波和红外数据,实现了基于传感器
信息共享的运动协调。
Fig 6 diagram of real robot and the master-slave tracking of virtual leader
Sensor systems
Wireless ethernet
Obstacle avoidance
formation
randomness
W1
W2
W3
W4
Movement controller
Multi-robot
Target tracking
6. Fig 7 diagram of coordinated control of robot formation
6 实验结果综述
为了验证基于虚拟领队的两机器人的
地面编队跟踪控制,以及三机器人的协调
控制完成任务的实验,我们在基于
ROBOCON2009 比赛的主题上,开发了三
台机器人:领队机器人(leader robot)、
跟随机器人(following robot)、敲鼓机器
人(drumbeating robot),机器人的主要
参数如 table 1。
robots Weight
(Kg)
hieght
(mm)
Radius of
wheels (mm)
Wheeltrea
d (mm)
Wheelbase
(mm)
Leader 14 740 100 540 600
Follower 13 720 100 720 600
Drum-beater 8 680 100 440 400
Table1. the physical parameter of the robots
我们把机器人完成各个子任务的时间
和机器人在各阶段的精度和最后完成任务
的精度,以及机器人成功完成人物的概率
信息在 Table 2 中展示。
Table2. Results of robot-controlling experiment
8. 8 Reference
[1] Chen W.D.,Xi Y.G.,Gu D.L.,Dong.S.L.
A task-oriented distributed controlling
system based on multi-robot. Application
and Theory of Automation Technology,
2002.8
[2]Zhang Y.,Luo Y., Zheng T.X.
Technology and applications of mobile
robots. Beijing: Electronic Industry Press,
2007.9
[3]Luo Z.Z. Cooperation of robotic sensing
and information. Beijing Mechanical
Industry Press, 2002
[4]Ma M.S.,He K.Z.,Research of outdoor
robotic localization, Electronic
Technology, 1998
[5]Deng.X.Y., Song Y.D., Anderson J.N.,
Performance of a menory-based
approach to the control of robotic
manipulators, System Theory, 1997
[6]Song Y.D., Memory-based control of
Non-linear Dynamic Systems Part I-
Design and Analysis, Industrial
Electronics and Applications, 2006
[7]Cai W.C.,Weng R.,Zhang B.,Li
F.,Stewart A.,Dhaliwal and Song Y.D.,
Development of Real0time Control Test-
bed for Unmanned Mobile Vehicles. Conf.
IEEE Industrial Electronics Paris,
FRANCE, 2006.10