Download to read offline
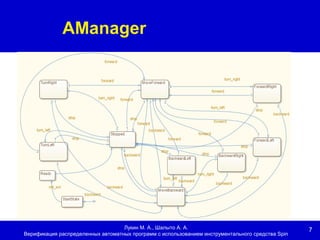
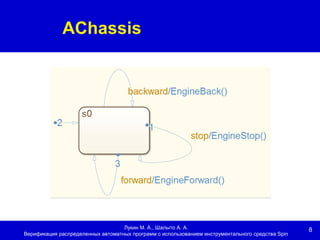

Документ описывает верификацию распределенных автоматных программ с использованием инструмента Spin, начиная с 2005 года и отмечая важные достижения, такие как выигранный грант в 2007 году. Обсуждаются области применения, примеры использования, а также ограничения метода Spin, включая размер автоматов и число переменных. В документе также приводятся примеры реализации автоматов для управления гусеничным шасси.