Downloaded 126 times






![Man_Ita_VRBrain4.x_Ver_1.01
5
7
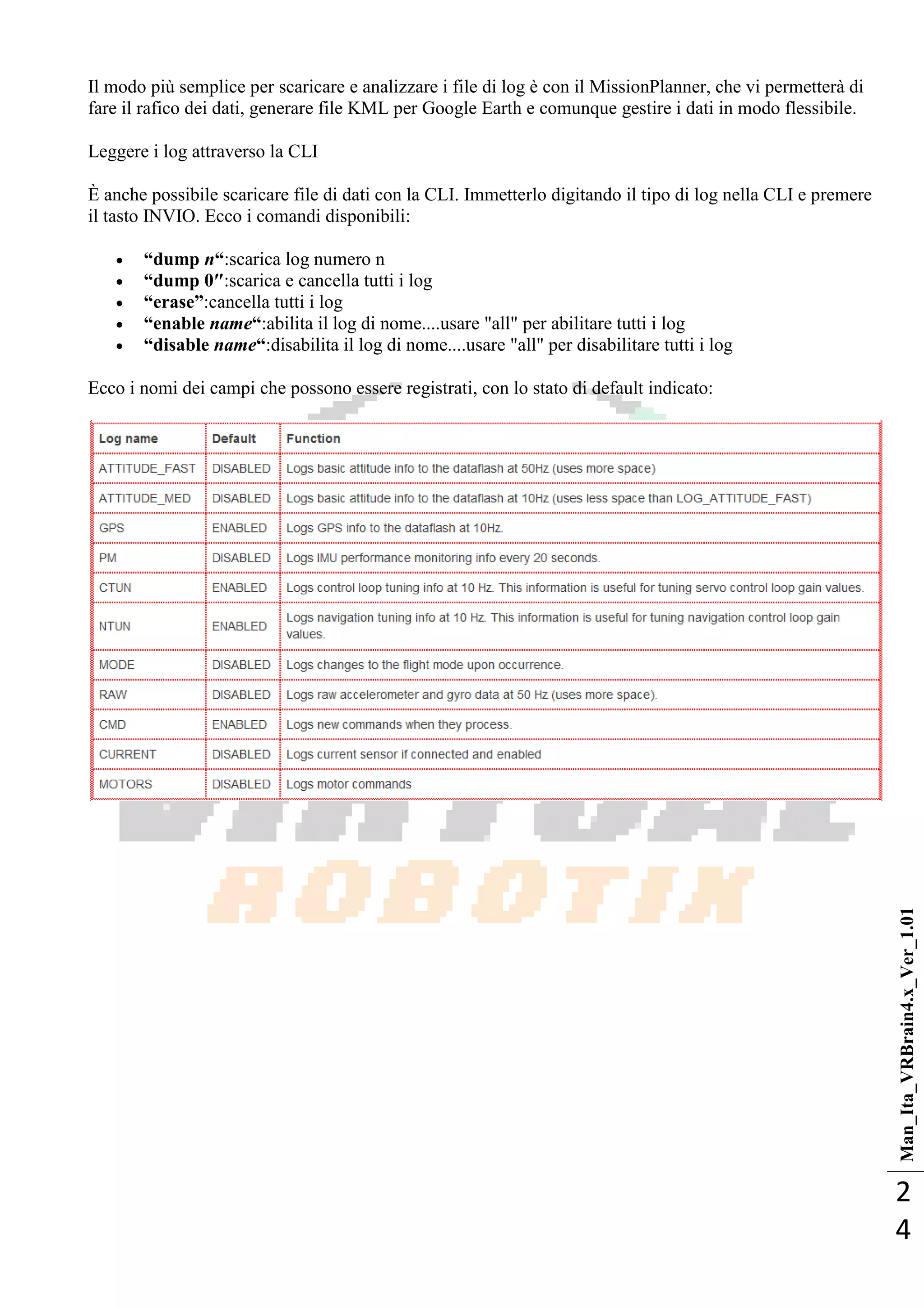
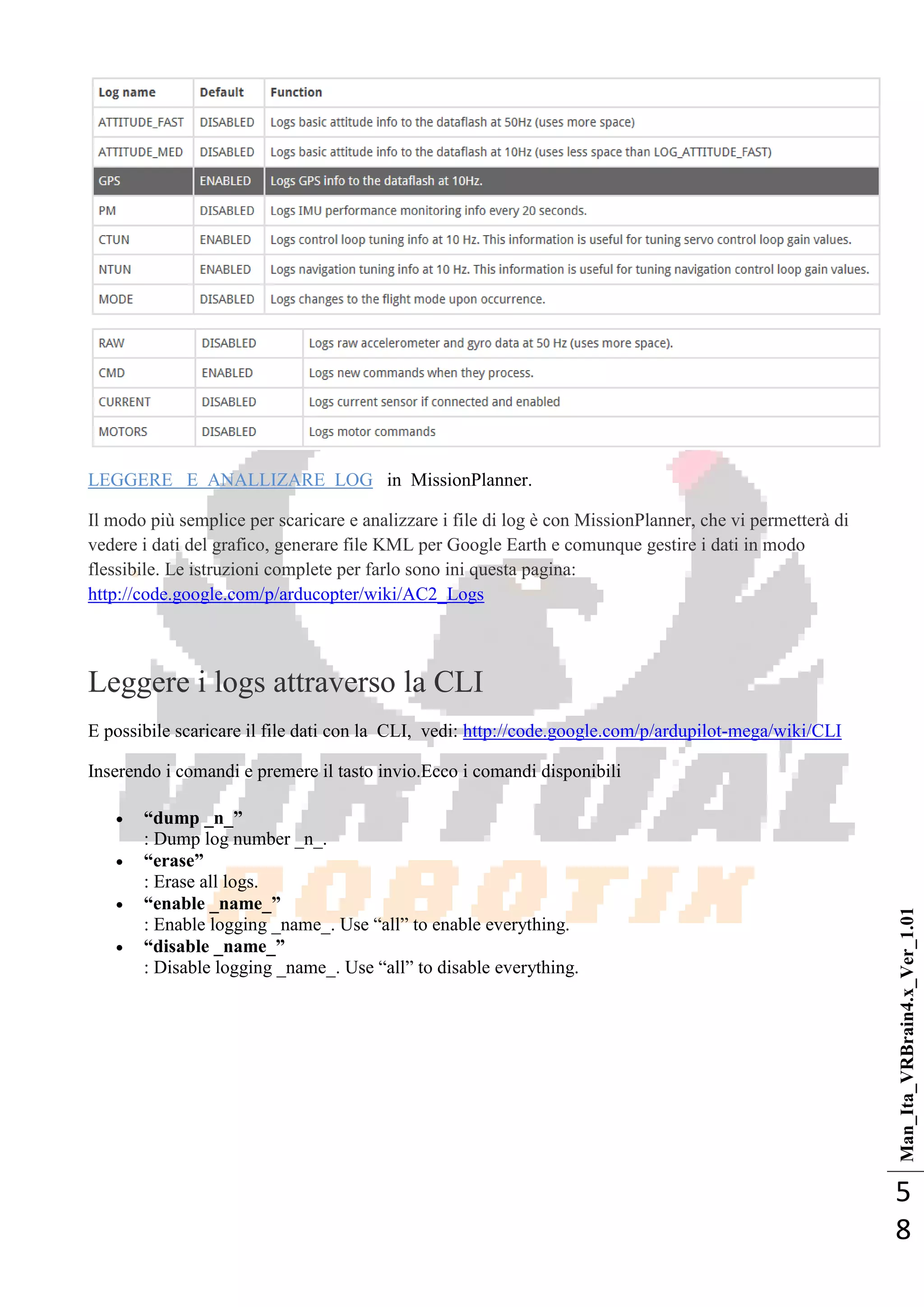
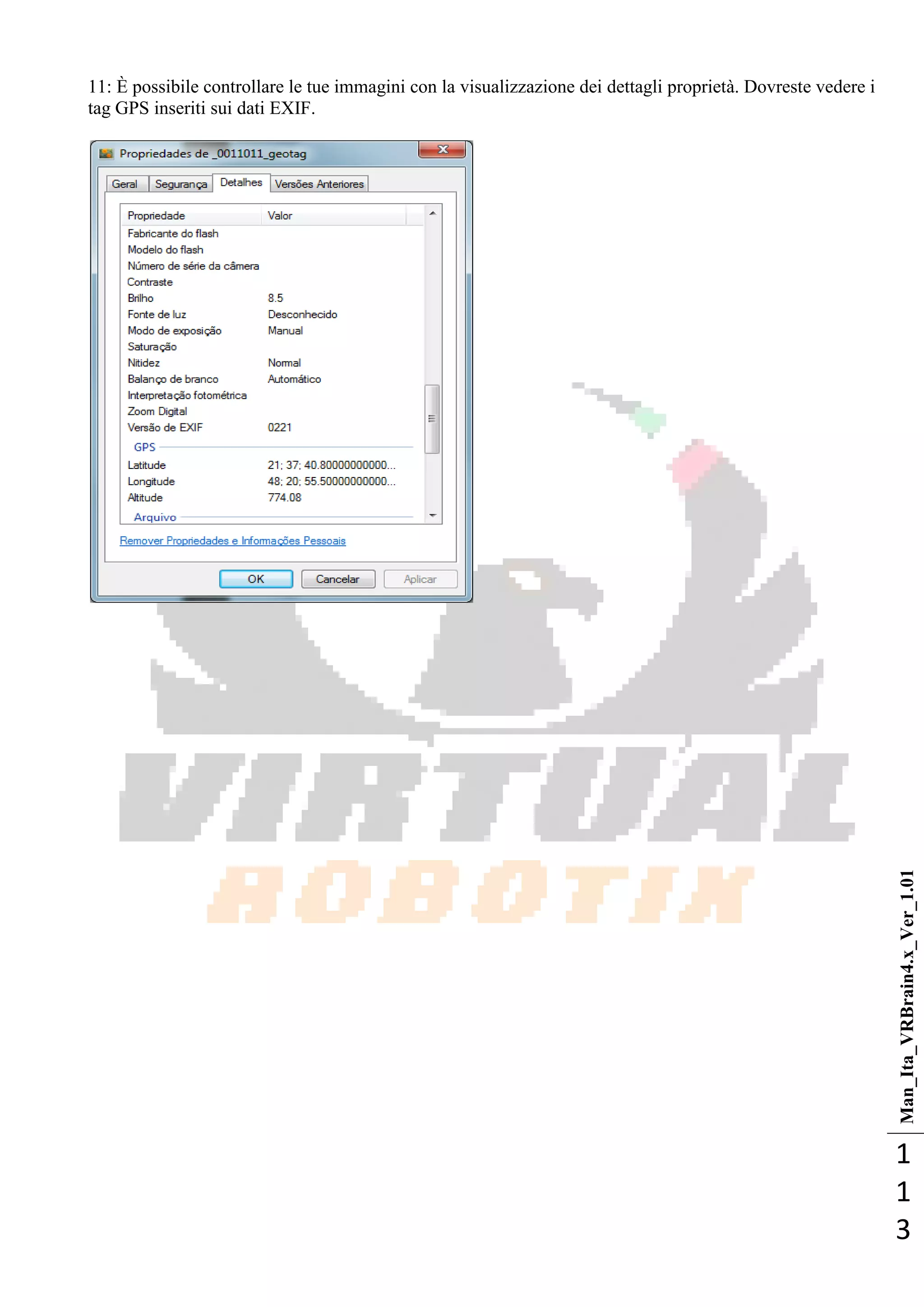
E‘ una buona cosa cancellare i log salvati dalla memoria,se la memoria si riempisse,non sarà registrato
più alcun log.
Ecco i tipi di dati che possono essere registrati nella memoria DataFlash a bordo. È possibile attivarli o
disattivare digitando: enable [nome log] nel menù CLI log come descritto.](https://image.slidesharecdn.com/manitavrbrain40ver1-01-130722133049-phpapp02/75/Man-ita-vr_brain40_ver_1-01-57-2048.jpg)










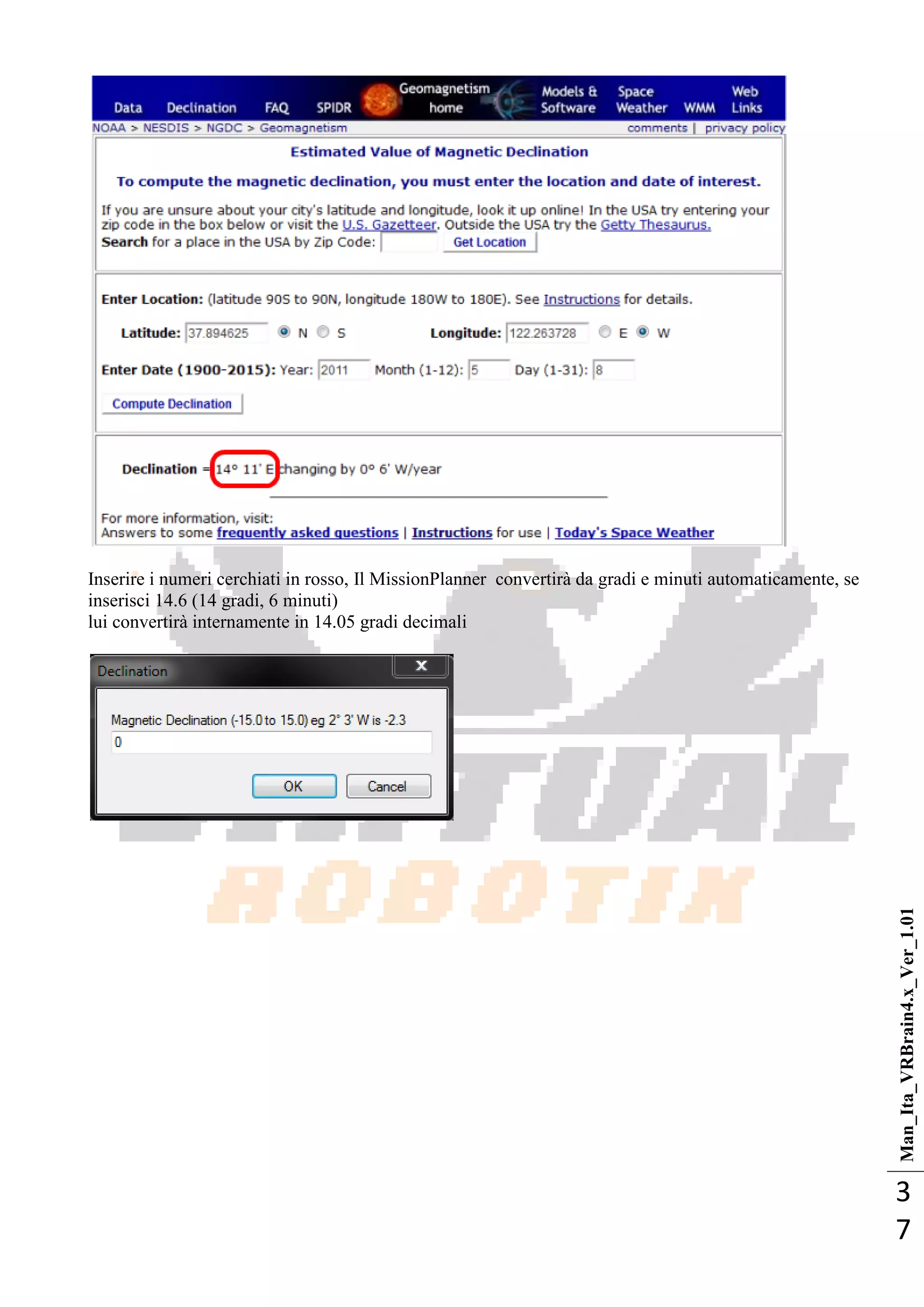
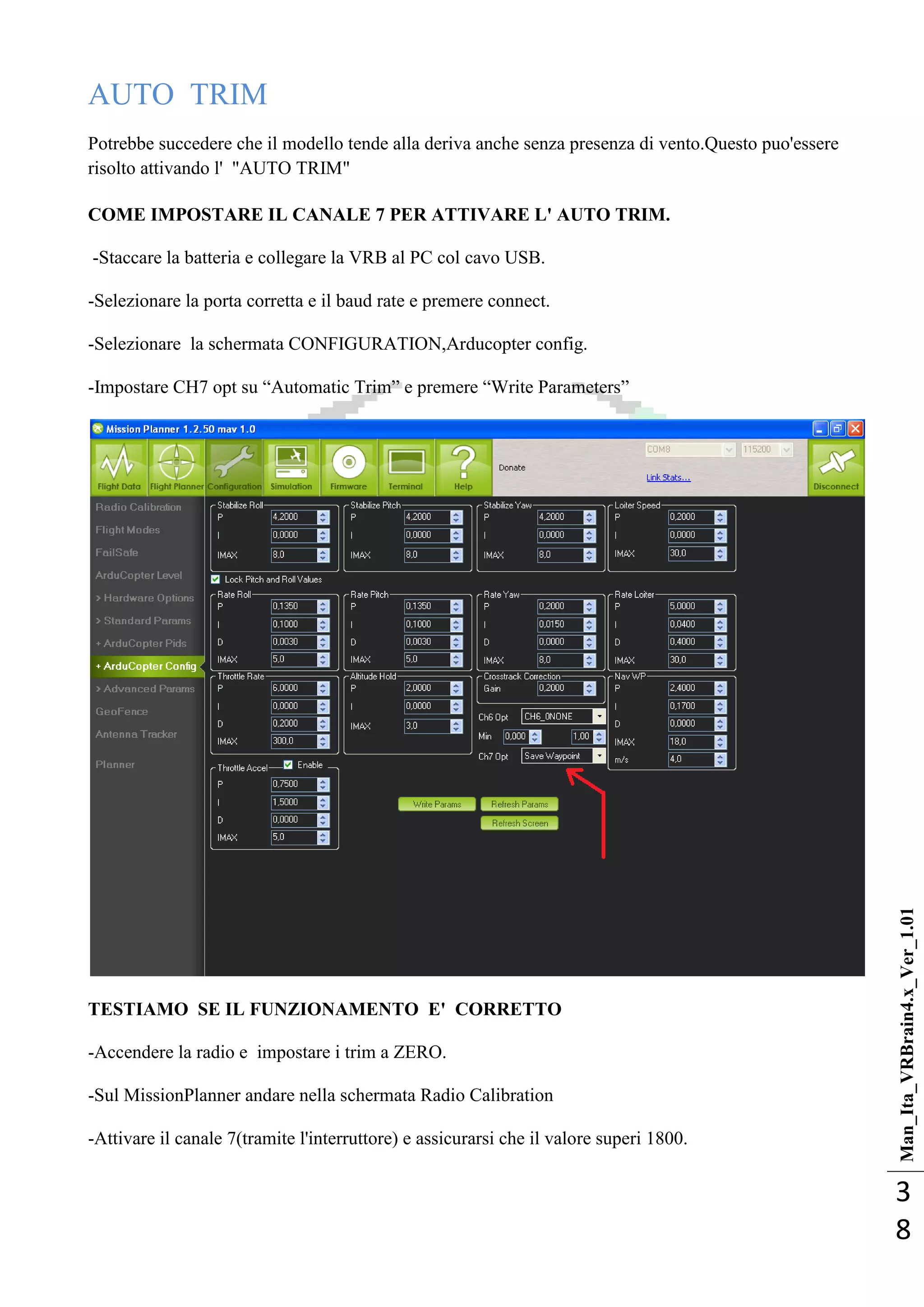
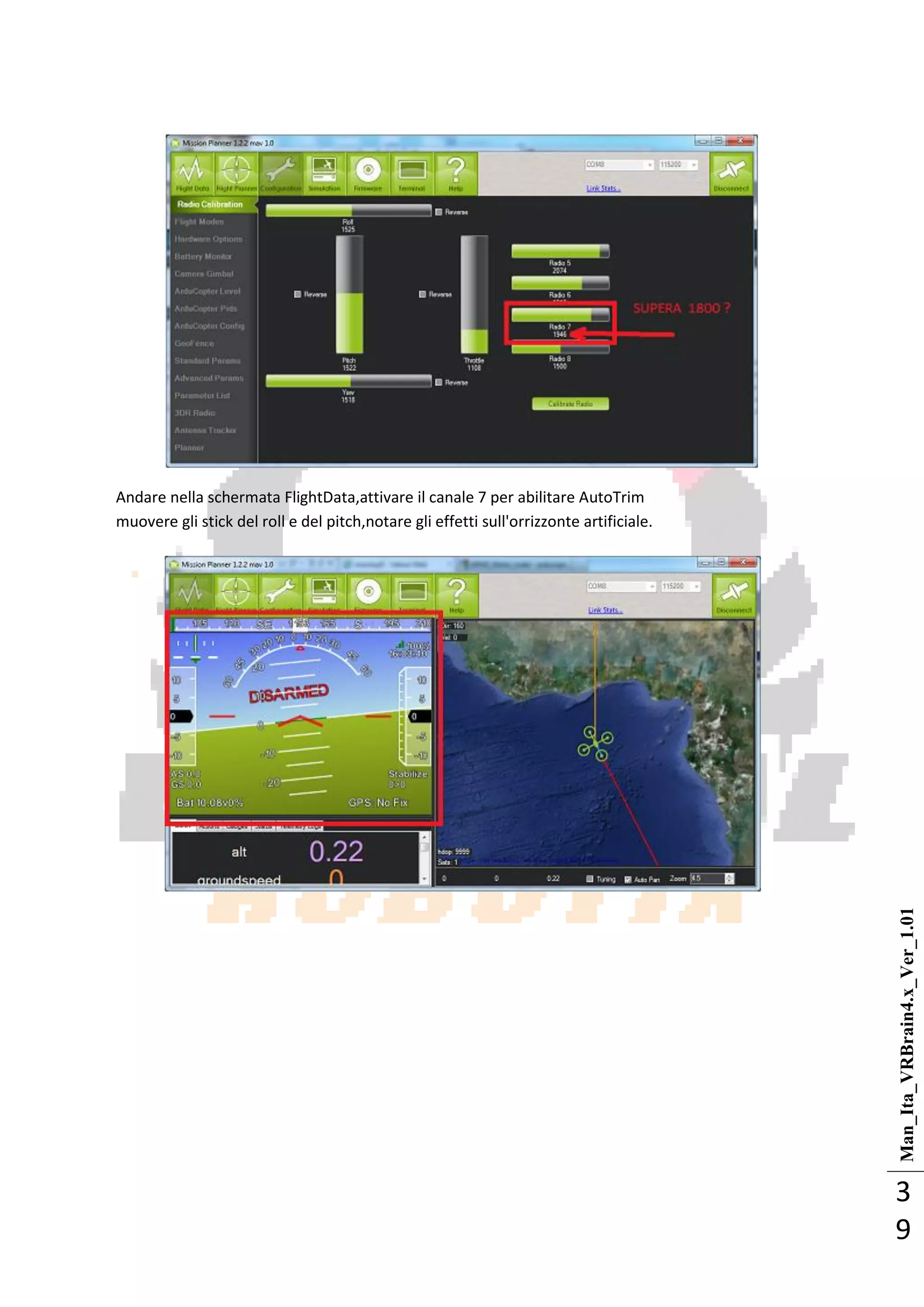
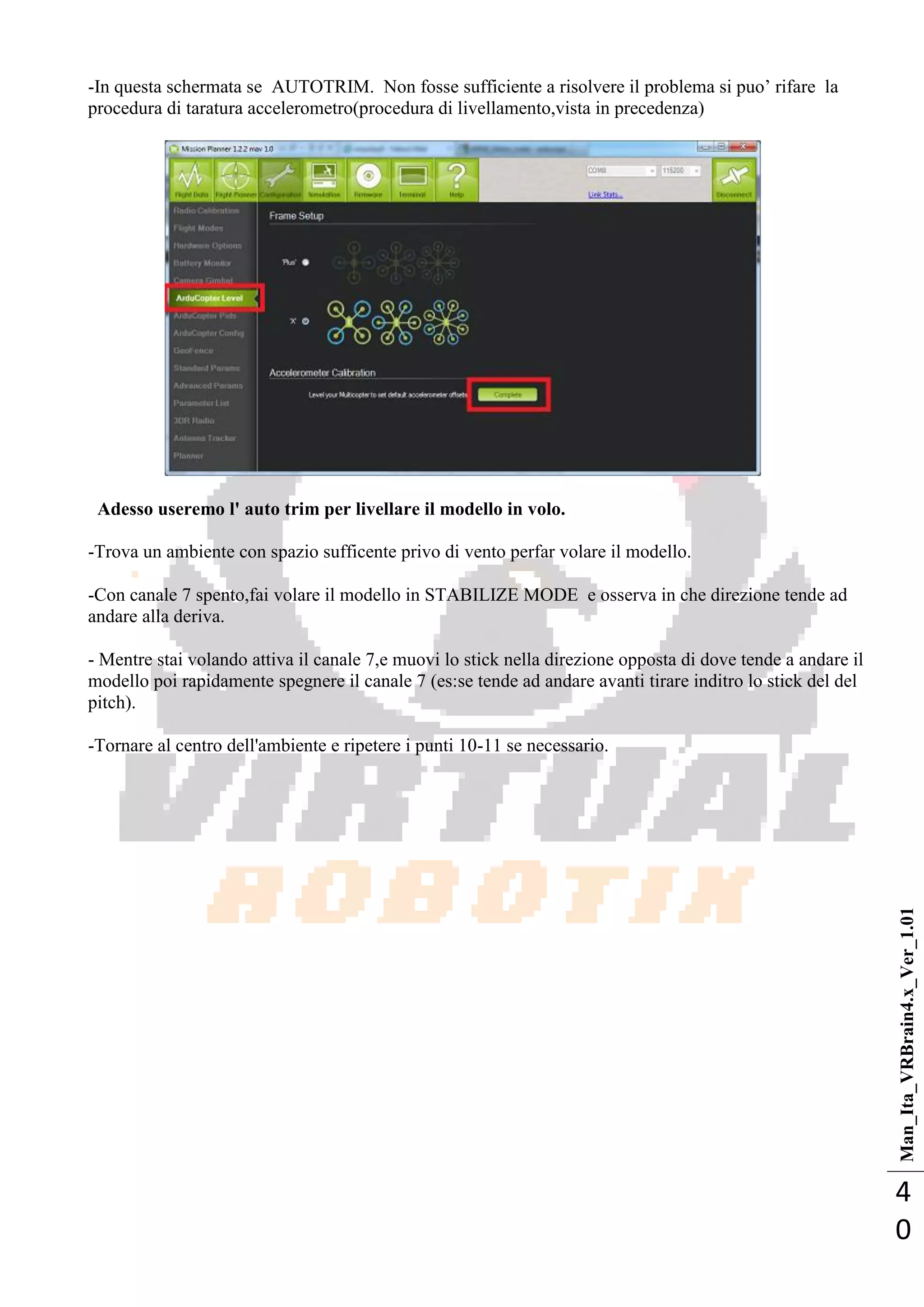
La guida fornisce istruzioni dettagliate per l'installazione e la configurazione del dispositivo di controllo VRBrain 4.0 su multirotori e altri modelli radiocomandati, inclusi collegamenti, aggiornamenti del firmware, e utilizzo del software Mission Planner. Sono descritti anche vari accessori e firmware disponibili, nonché raccomandazioni per l'installazione e la protezione del dispositivo. È sottolineata l'importanza di avere conoscenze di base di elettronica e modellismo per un corretto funzionamento e un supporto tecnico tramite forum.



























