More Related Content

PDF
組み込み向けC++のやり方を探る - mbedで楽しい組み込みプログラミング - 
PPTX

PPTX
「推しが100万部売れて欲しい!」 推し技術書LT大会 発表スライド 
PPTX

PPTX
C# Tokyo コミュニティ説明 20200925 
PPTX

PDF

PPT
What's hot

PPTX

PDF

PPTX

PPTX
Uno Platform 入門 2020/04/03 
PPTX

PDF

PPTX

PDF

PPTX

PDF
ドット絵でプログラミング!難解言語『Piet』勉強会 
PPTX

PDF

PPTX
Visual Studio Code で C# でのアプリ開発 
PDF

PDF

PDF
Kanrk05 .Netでお仕事しているプログラマがスクリプト言語として使うRuby 
PDF
Customizing cargo for cross compiling 
PPTX

PDF

PDF
Viewers also liked

PDF
unique_ptrにポインタ以外のものを持たせるとき 
PDF
Boost.Spirit.QiとLLVM APIで遊ぼう 
PDF

PPT

PPTX
BoostAsioで可読性を求めるのは間違っているだろうか 
PDF

PPTX

PPTX
RoboticsとC++@歌舞伎座.tech#8「C++初心者会」
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.




![ROSのC++11/14への対応状況
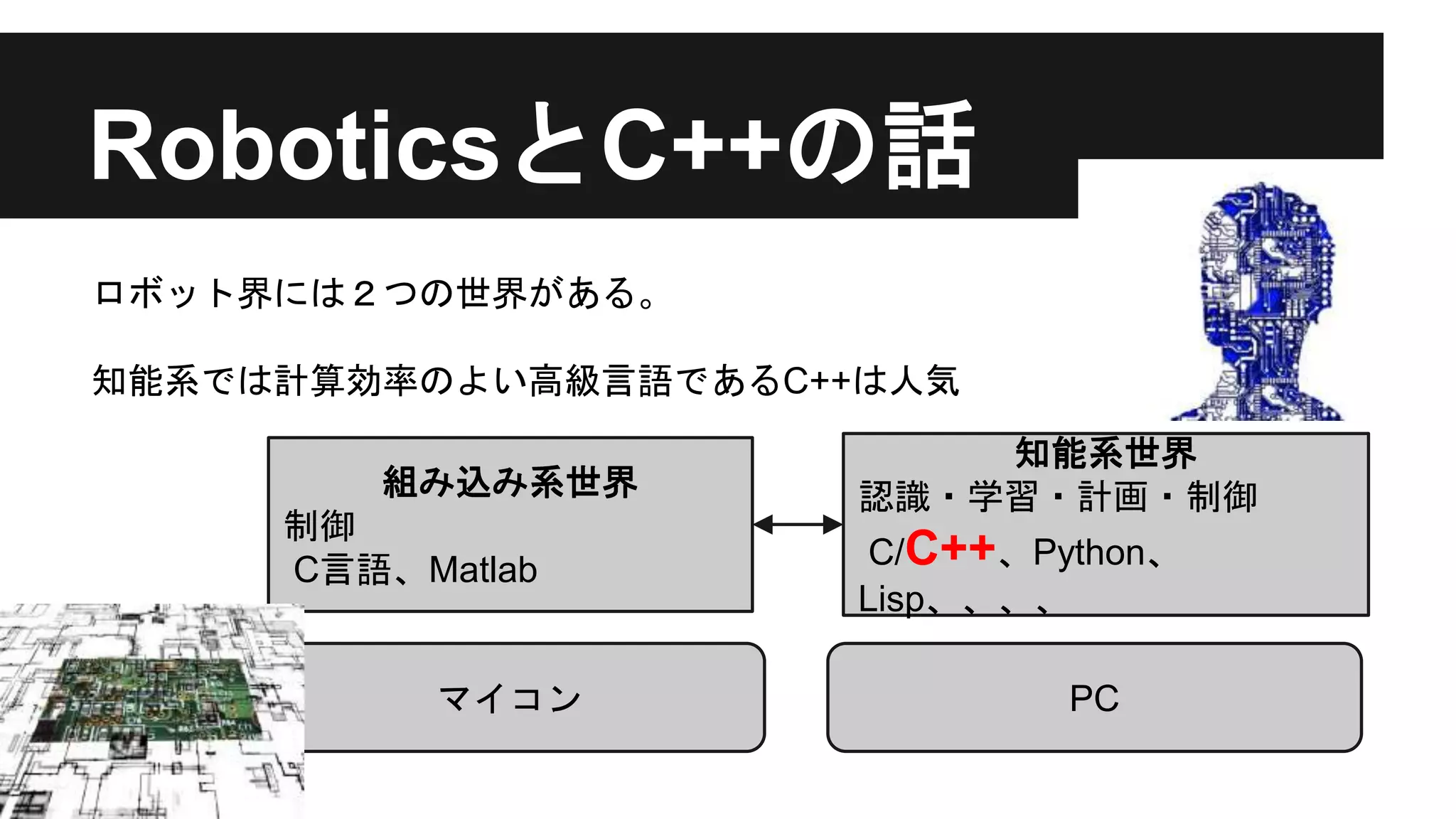
ロボット界ではC++11/14への対応への関心は薄そうなイメージ。C++03が主流。
こんな感じにしたいが・・・
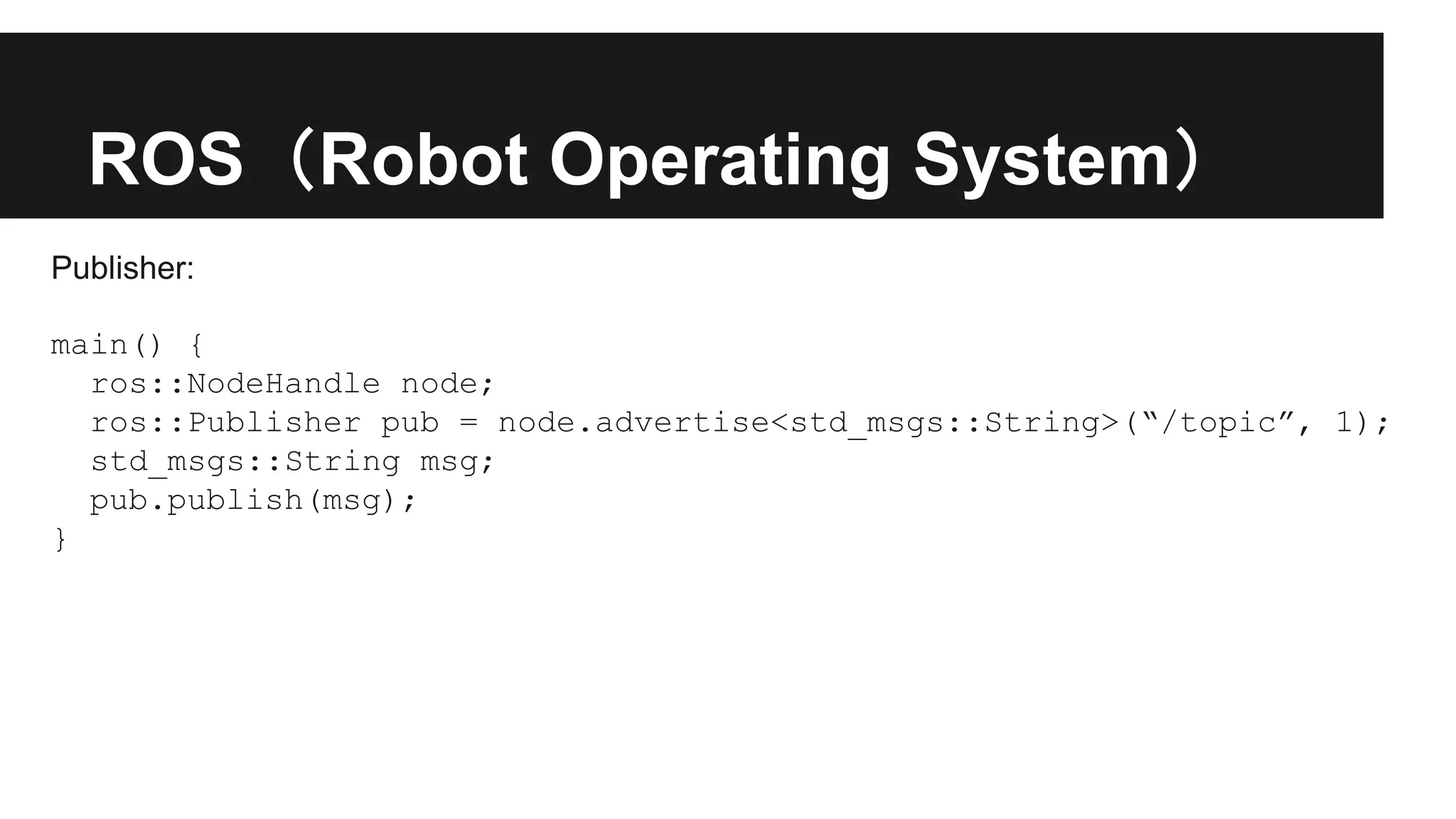
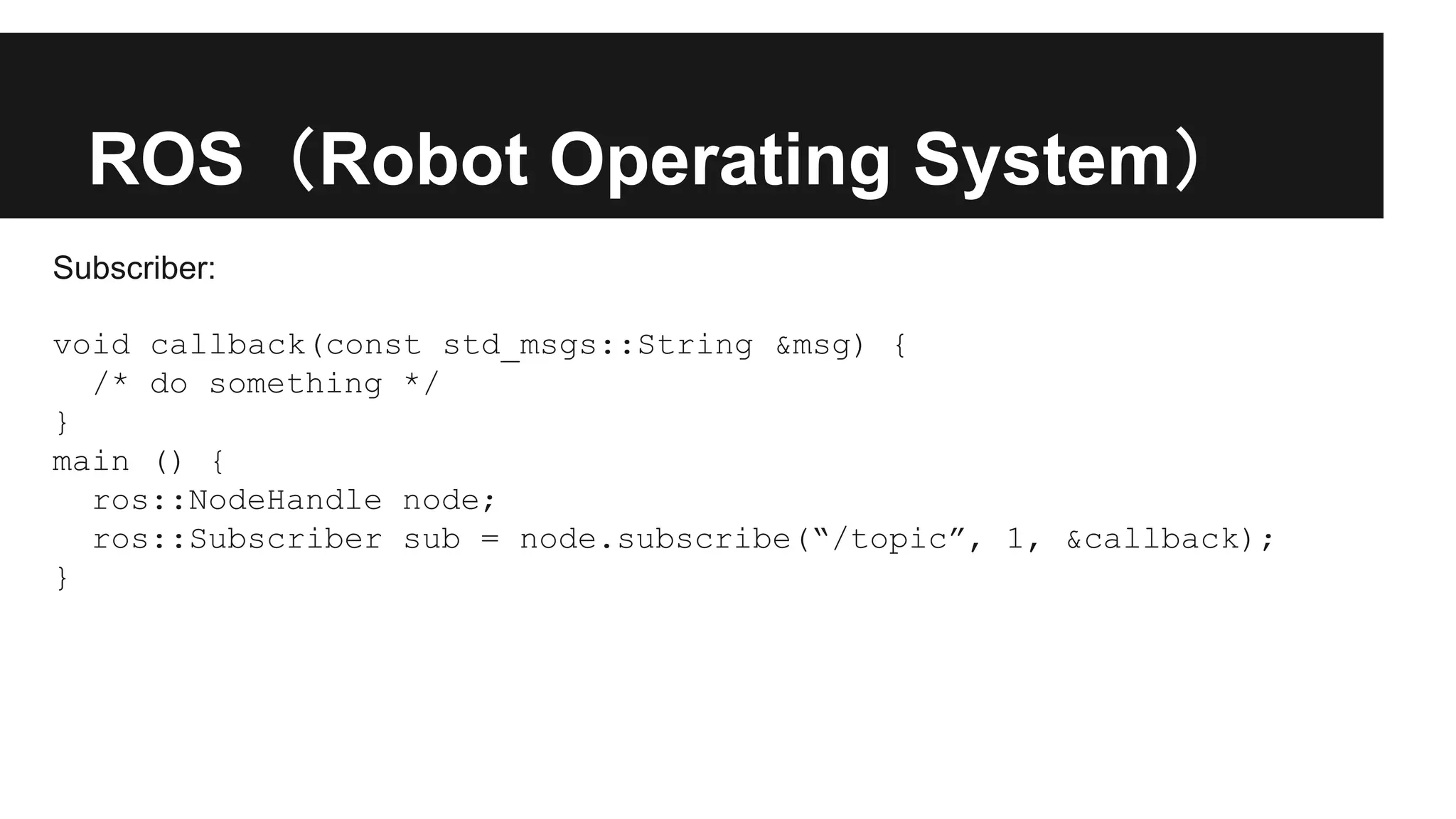
main() {
ros::NodeHandle node;
auto sub = node.Subscriber(“/topic”, 1, [] (const std_msgs::String& msg)
{
/* do something */
});
}](https://image.slidesharecdn.com/roboticsc-150517082717-lva1-app6892/75/Robotics-C-tech-8-C-14-2048.jpg)