
Recommended
More Related Content
Featured
Featured (20)
Solucion parcialiii v1_2015i
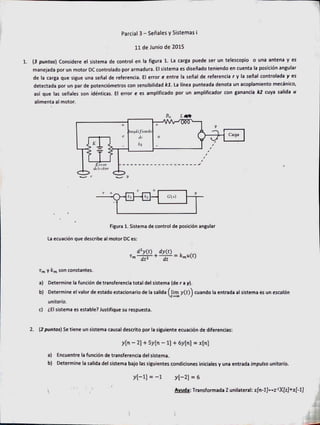
- 1. Parcial3—Señales y Sistemas i 11 de Junio de 2015 1. (3 puntos) Considere el sistema de control en la figura 1. La carga puede ser un telescopio o una antena y es manejada por un motor DC controlado por armadura. El sistema es diseñado teniendo en cuenta la posición angular de la carga que sigue una señal de referencia.El error e entre la señal de referenciar y la señal controladay es detectada por un par de potenciómetroscon sensibilidadkl. La línea punteadadenota un acoplamientomecánico, así que las señales son idénticas. El error e es amplificado por un amplificadorcon ganancia k2 cuya salida u alimenta al motor. Implificndo Carga ka Error «tor Figura1. Sistema de control de posición angular La ecuación que describe al motor DC es: d2y(t) dy(t) Tm — = kmu(t)dt2 dt Tm y km son constantes. a) Determine la función de transferencia total del sistema (de r a y). b) Determine el valor de estado estacionario de la salida lim y(t)) cuando la entrada al sistema es un escalón unitario. c) ¿El sistema es estable? Justifique su respuesta. 2. (2puntos) Se tiene un sistema causal descrito por la siguiente ecuación de diferencias: —2)+ Sy[n —1)+ 6ytn) = x[nl a) Encuentre lafunción de transferencia del sistema. b) Determine la salida del sistema bajo las siguientes condiciones iniciales y una entrada impulso unitario. yt-ll = -1 yt-2) =6 AygdQ•.Transformada Z unilateral: