7. 分束板 补偿板
t
k-1
k-2
2
M
1M′
λθδ kt i == cos2
λγδ ktn == cos2
↓⇒↓ it θ
t
2M
1M′
k
k-1
返回 退出
// M21M′
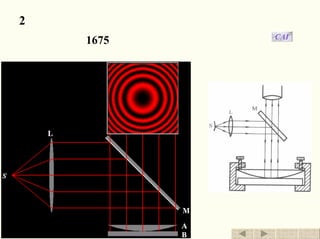
当 t 连续改变时干涉条纹如何变化?
同心圆环状的等倾干涉条纹
the mirrors are perpendicular to each other
12. §15.4 偏振光的干涉
1P
2P
E
r
x
αcosEEe = αsinEEo =
βcos2 ee EE =
)
2
cos(2 β
π
−= oo EE
A
*
S
βαsinsinE=
o
y
返回 退出
E
r 1P2P
αβ
oE
eE
2oE
2eE
O
A
x
y
)
2
cos(sin β
π
α −= E
βαcoscosE=