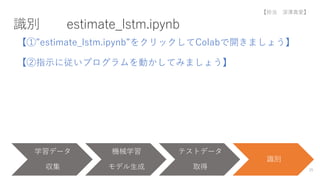
東京農工大学のGIYSEプログラムのクラスステージで高校生向けに開催した実習の講義資料です。
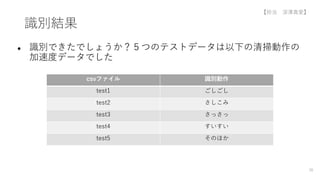
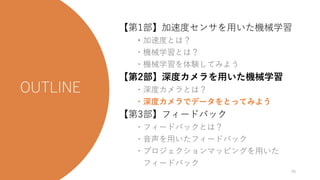
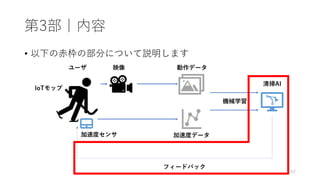
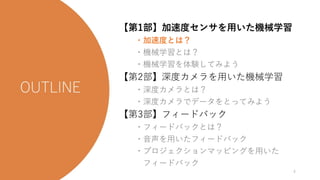
加速度を用いた清掃行動識別を体験することで機械学習の基礎を学ぶことができます。
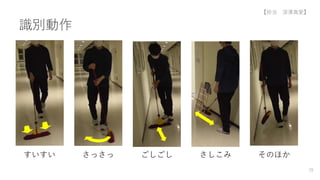
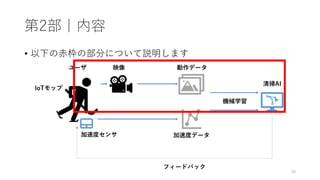
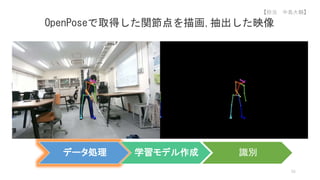
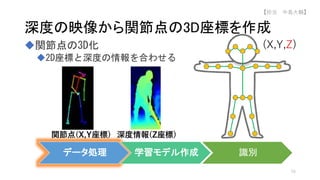
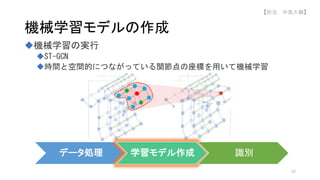
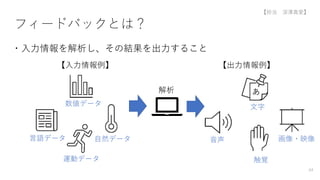
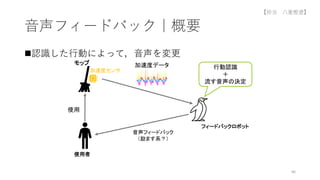
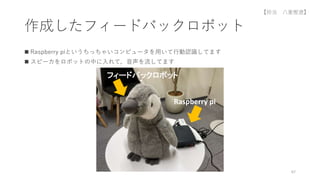
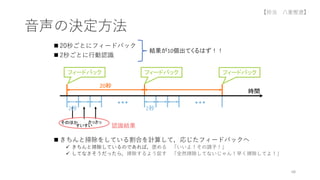
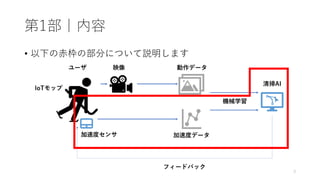
また画像を用いた清掃行動識別や清掃行動に対するフィードバックの方法も紹介しています。
実習で使用した機械学習を体験できるフォルダは以下のリンクからダウンロードすることができます。
https://web.tuat.ac.jp/~yu-nakayama/exp/202202GIYSE.zip
ダウンロードしたフォルダは自身のGoogleドライブにアップロードすることで使用できます。

![加速度センサについて
対象物が動いた時の加速度を計算する機械
3軸(x,y,z)の加速度が取得可能
→どの向きに動いたのかが分かる
様々な使い道
ゲームコントローラ
歩数計
カメラの手ブレ機能
車のエアバック
スマートフォン
9
[引用]秋月電子通商,L3GD20H使用3軸ジャイロセンサーモジュールキット,
https://akizukidenshi.com/catalog/g/gK-15096/
実物はこんなの
縦持ち 横持ち
【担当 八重樫遼】](https://image.slidesharecdn.com/giyseiot-220215051727/85/IoT-GIYSE-9-320.jpg)