Downloaded 548 times
(
)(
1](https://image.slidesharecdn.com/z-transformsandtheirapplications1-150409114412-conversion-gate01/75/Z-transforms-and-their-applications-5-2048.jpg)
![Important results on Z-Transforms
Shifting Theorem
Z(a yk-1) = z-1 Y[z]
Multiplication by a constant
Z(a yk) = a Y[z]](https://image.slidesharecdn.com/z-transformsandtheirapplications1-150409114412-conversion-gate01/75/Z-transforms-and-their-applications-6-2048.jpg)
![Connecting Z and Fourier
transforms
The DTFT is a special case of the Z-transform.
The bilateral Z-transform is defined as:
special case is
Since ,
it is the evaluation of the Z-transform around
the unit circle in the complex plane.
1||
][)(
i
i
n
n
e
ez
znxzX](https://image.slidesharecdn.com/z-transformsandtheirapplications1-150409114412-conversion-gate01/75/Z-transforms-and-their-applications-11-2048.jpg)

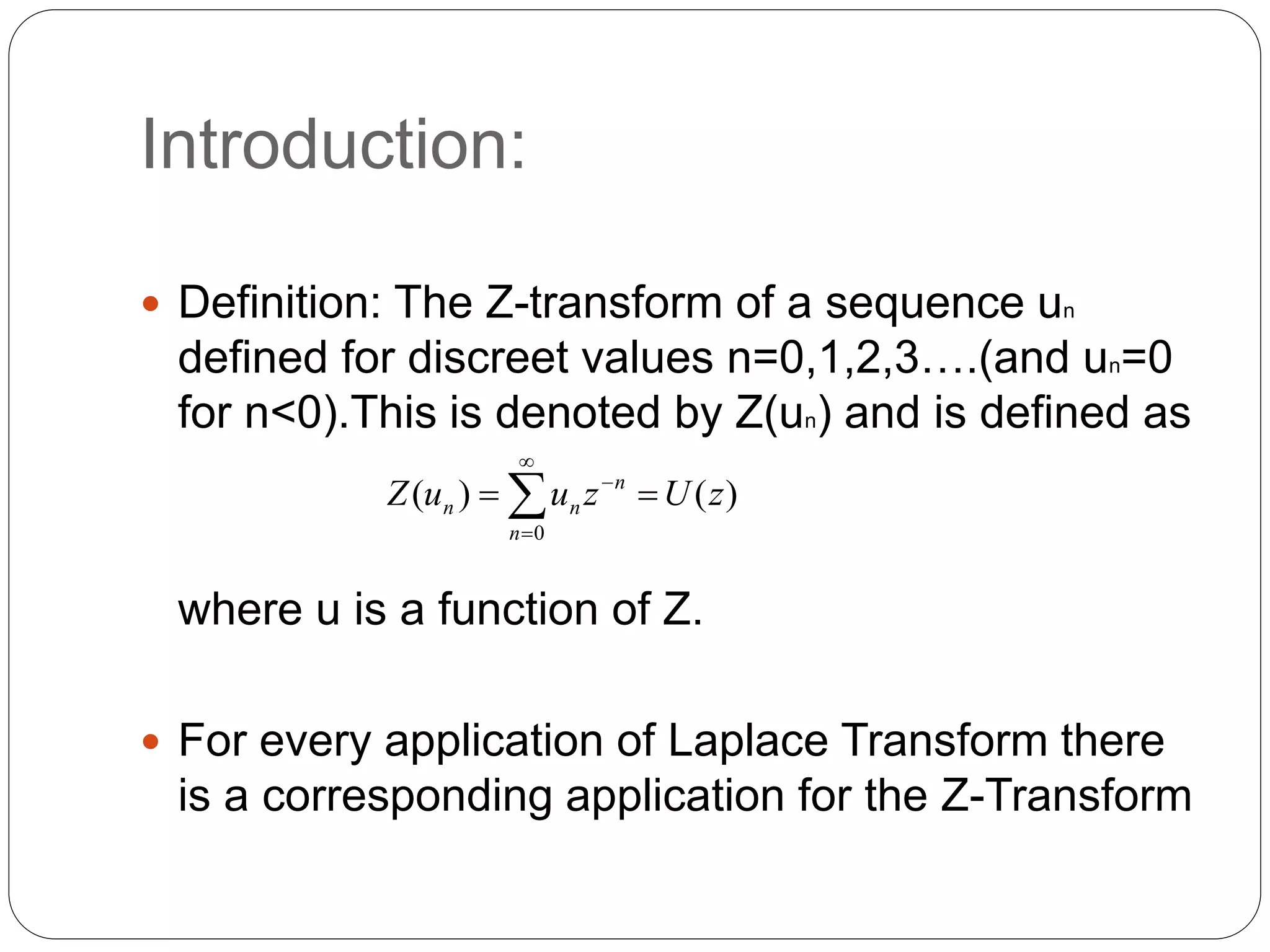
Z-transforms can be used to analyze systems described by difference equations. The Z-transform relates the terms of a discrete-time sequence to a complex function of a complex variable z. Some key applications of Z-transforms include analyzing Fibonacci series, Newton's interpolation formula, and compound interest problems. Important results for Z-transforms include theorems regarding shifting, constants, initial values, final values, and convolution. Z-transforms are also connected to other transforms like the Fourier transform and Laplace transform through relationships like the discrete-time Fourier transform and bilinear transform.