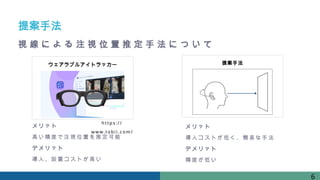
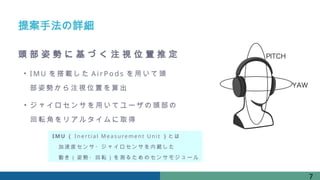
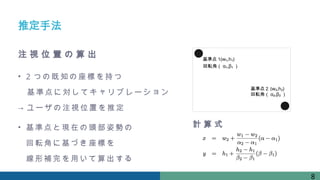
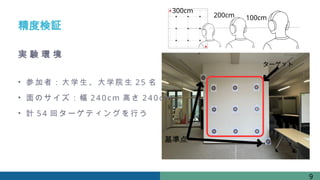
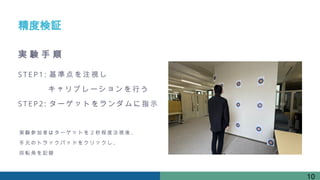
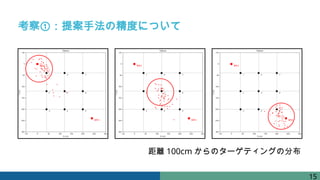
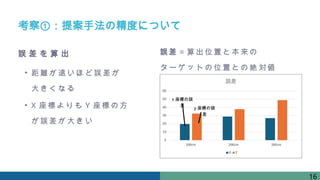
本研究の目的は、ユーザの注視した座標を頭部姿勢に基づいて推定することである。 ユーザは、何かに興味を示したり、操作したりする際に、対象に注目するため、その方向に顔を向ける。 そのため、ユーザの顔が向いている方向を検出することができれば、ユーザの注目している対象を推定することが可能になる。 そこで本研究では、ユーザが装着するIMU搭載ヘッドホンから取得した回転角を用いて頭部姿勢を取得し、そのユーザの注視位置を推定する手法を提案する。本稿では、ユーザ注視位置と、システムが推定した座標を比較することで提案手法の有効性を検証するとともに、想定される使用方法について議論する。



















![YutakaMorinoDEIM発表用スライド [webメディアがSNSに与える影響]2019](https://cdn.slidesharecdn.com/ss_thumbnails/deim-250707052628-be27f26c-thumbnail.jpg?width=640&height=640&fit=bounds)










