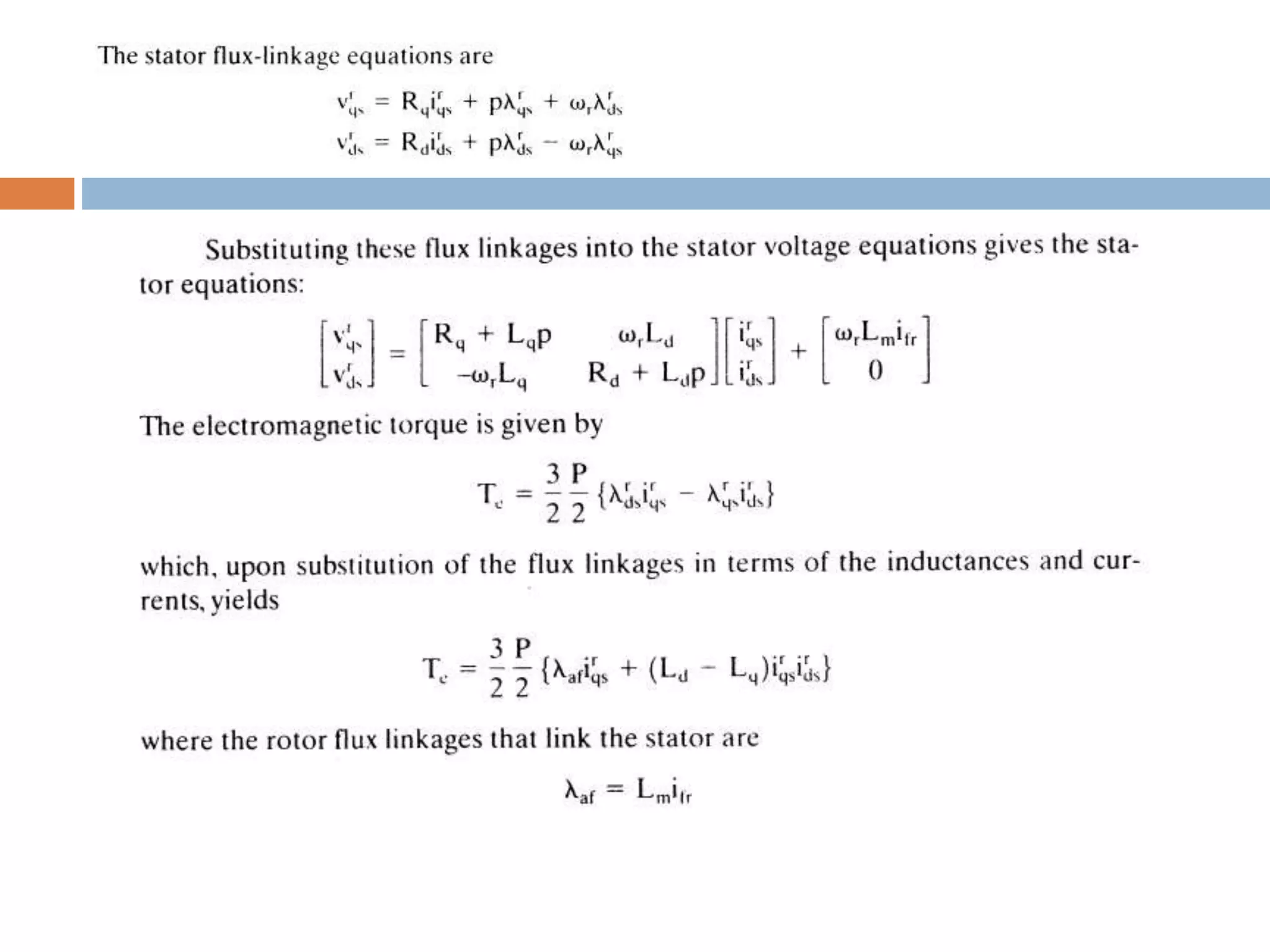
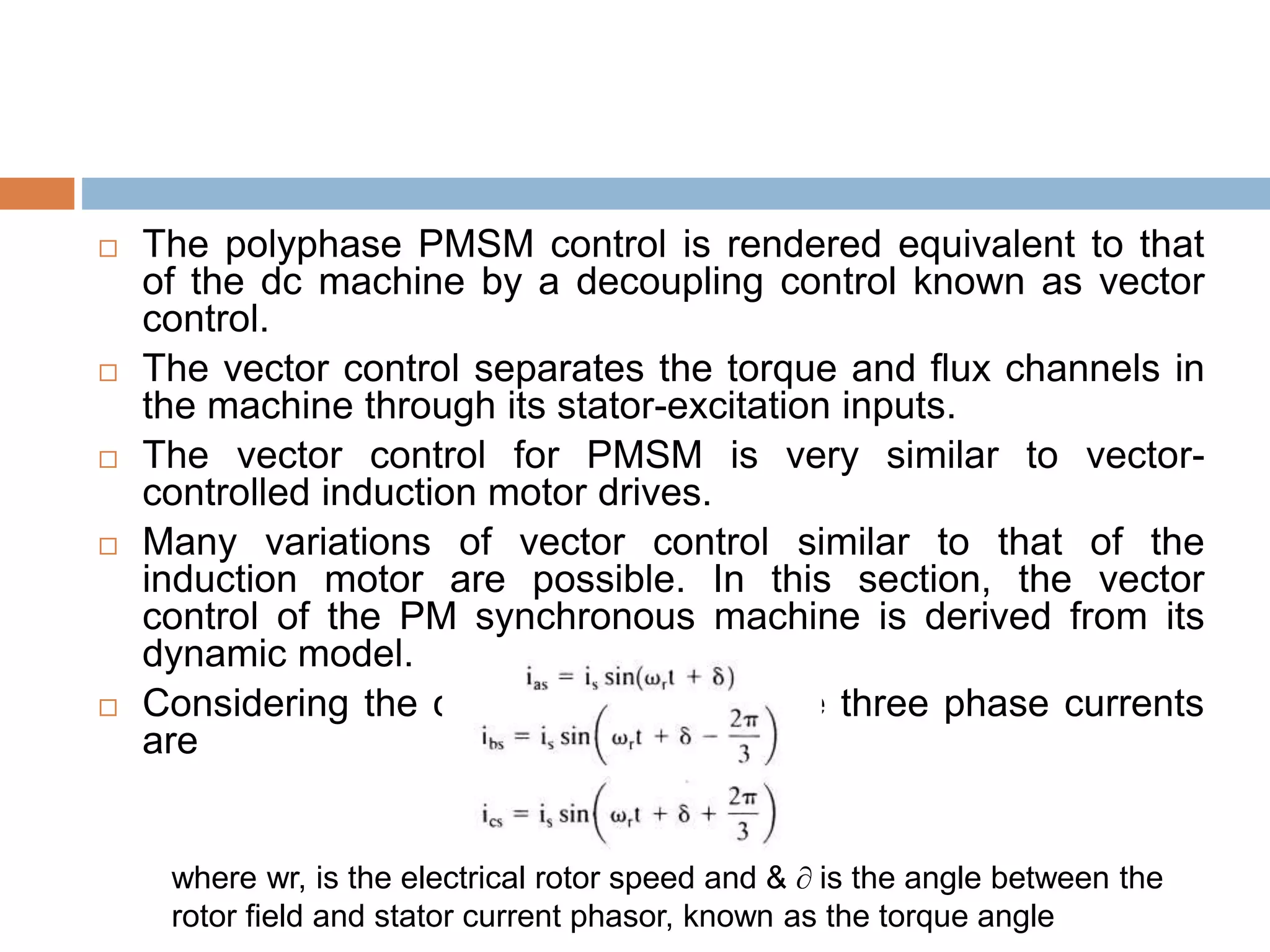
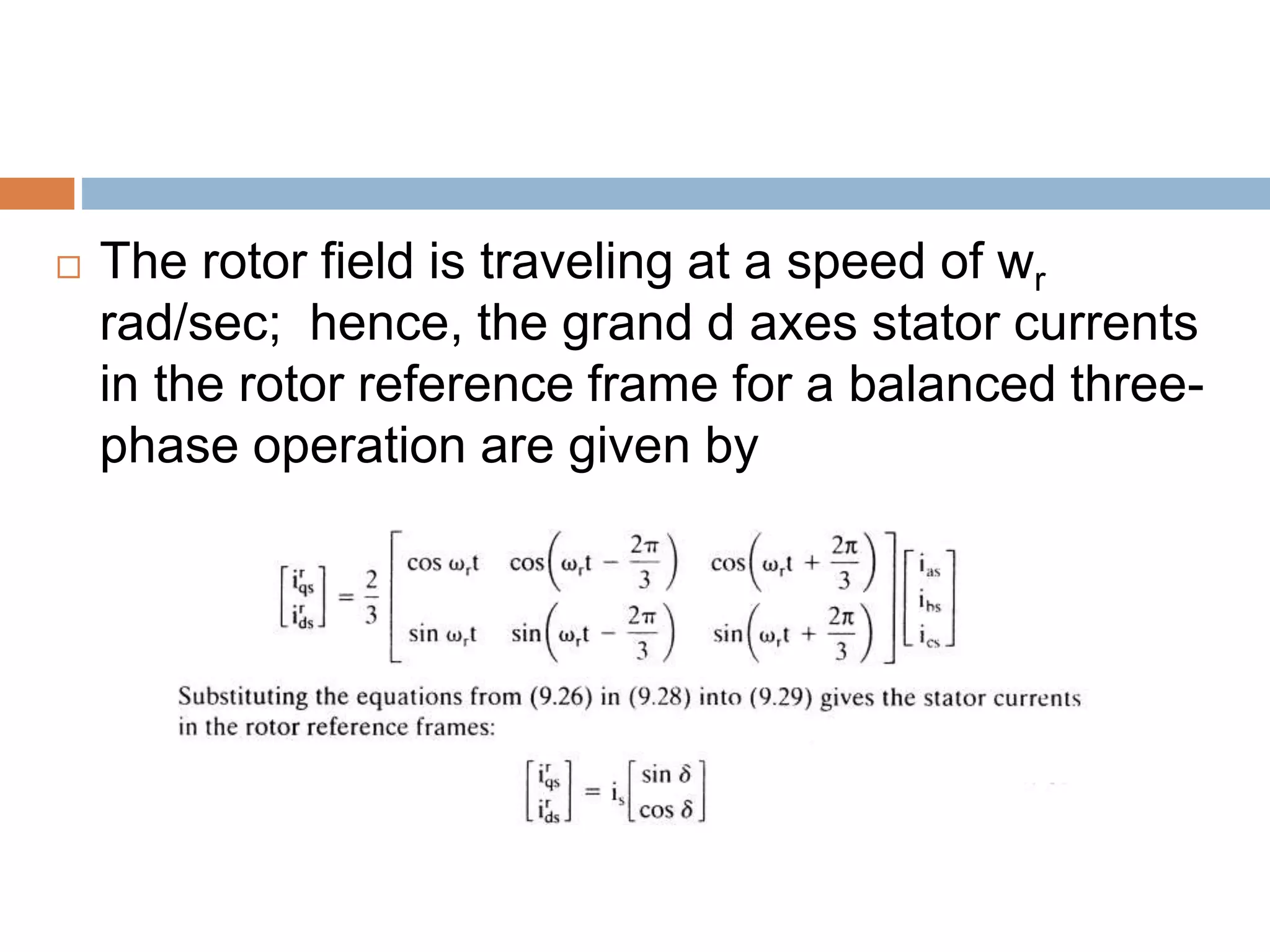
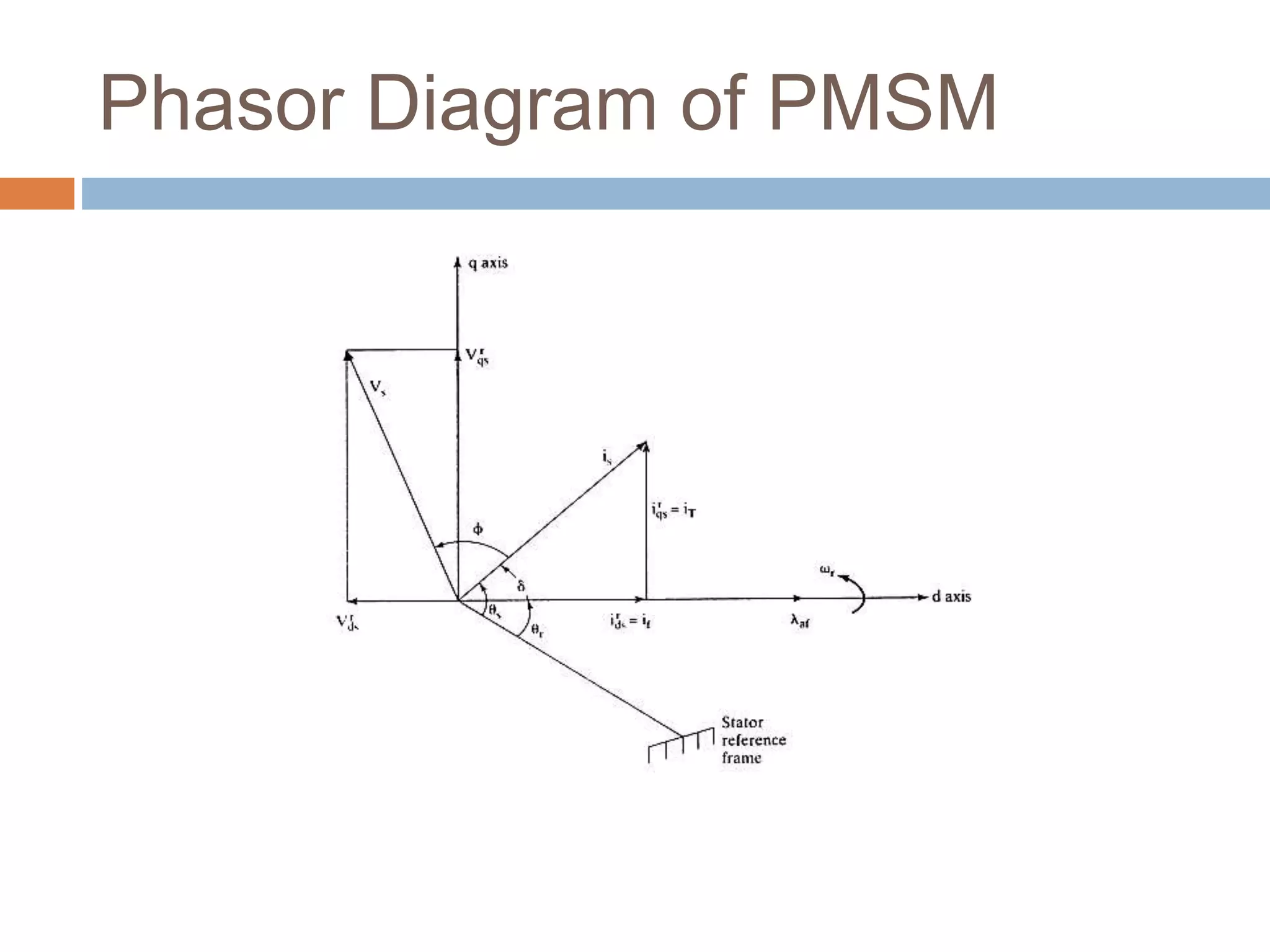
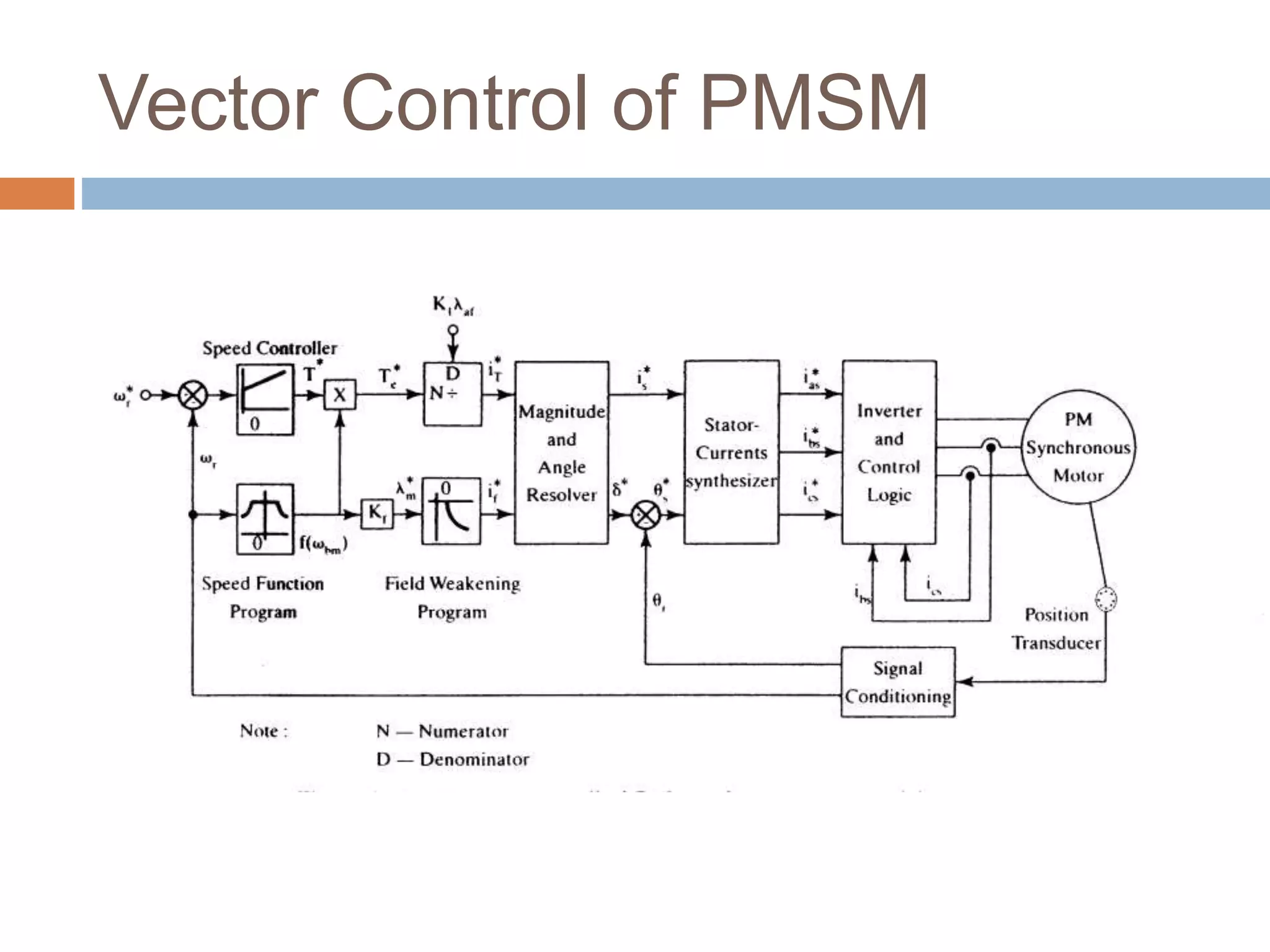
The document discusses vector control of permanent magnet synchronous motors (PMSM). It begins by describing the dynamic model of a PMSM, including assumptions made about the rotor flux. It then derives the stator equations in the rotor reference frame to model the PMSM similarly to an induction motor. Vector control of the PMSM is then derived from its dynamic model to decouple the torque and flux channels by controlling the stator currents in the d-q reference frame. This allows controlling the PMSM similarly to a separately excited DC motor.