Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Shin-ya Koga
PDF, PPTX
9,986 views
自律走行ロボットをプログラミングするということ ~ETロボコンの場合~
2013/09/14 に開催された OSC 2013 Hokkaido で行った、ET ロボコン紹介セミナーで使ったスライド。
Education
◦
Read more
8
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 37
2
/ 37
3
/ 37
4
/ 37
5
/ 37
6
/ 37
7
/ 37
8
/ 37
9
/ 37
10
/ 37
11
/ 37
12
/ 37
13
/ 37
14
/ 37
15
/ 37
16
/ 37
17
/ 37
18
/ 37
19
/ 37
20
/ 37
21
/ 37
22
/ 37
23
/ 37
24
/ 37
25
/ 37
26
/ 37
27
/ 37
28
/ 37
29
/ 37
30
/ 37
31
/ 37
32
/ 37
33
/ 37
34
/ 37
35
/ 37
36
/ 37
37
/ 37
More Related Content
PPTX
最近のやられアプリを試してみた
by
zaki4649
PDF
オブジェクト指向とSOLID原則の入門
by
KISARAGIMakoto
PPTX
本当のオブジェクト指向は可読性を上げる
by
Wataru Terada
PPTX
Dronekitによる python apiとアプリ開発の概要
by
Masami Ogoshi
PDF
Active Object
by
y-uti
PDF
게임제작개론 : #0 과목소개
by
Seungmo Koo
PDF
모바일 게임기획 따라하며 배우기
by
Sunnyrider
PPTX
ARマーカーを利用したHoloLens同士の位置合わせ
by
Takahiro Miyaura
最近のやられアプリを試してみた
by
zaki4649
オブジェクト指向とSOLID原則の入門
by
KISARAGIMakoto
本当のオブジェクト指向は可読性を上げる
by
Wataru Terada
Dronekitによる python apiとアプリ開発の概要
by
Masami Ogoshi
Active Object
by
y-uti
게임제작개론 : #0 과목소개
by
Seungmo Koo
모바일 게임기획 따라하며 배우기
by
Sunnyrider
ARマーカーを利用したHoloLens同士の位置合わせ
by
Takahiro Miyaura
What's hot
PDF
xR Developerなら知っておきたいカメラの基礎知識
by
Satoshi Maemoto
PDF
ROSCon発表の振り返りとROSConの振り返り(ROS Japan UG #48 ROSCon 2022ふりかえり会)
by
Atsushi Hasegawa
PPTX
猫でも分かる UE4のAnimation Blueprintの運用について
by
エピック・ゲームズ・ジャパン Epic Games Japan
PPTX
Photon Fusionのはじめの一歩
by
聡 大久保
PDF
リアルタイムレイトレーシング時代を生き抜くためのデノイザー開発入門
by
Silicon Studio Corporation
PDF
GitHubの機能を活用したGitHub Flowによる開発の進め方
by
Takeshi Mikami
PDF
WebRTCの技術解説 第二版 公開版 完全版
by
Contest Ntt-west
PDF
私がスクラムをやめた理由 - 全員スクラムマスター。@DevLove -
by
Takao Oyobe
PDF
【Unite Tokyo 2018 Training Day】ProBuilderで学ぶレベルデザイン レベルデザインについて
by
Unity Technologies Japan K.K.
PDF
ビジュアルスクリプティングで始めるUnity入門1日目 プレイヤーを動かそう
by
Unity Technologies Japan K.K.
PDF
UE4のモバイル開発におけるコンテンツアップデートの話 - Chunk IDとの激闘編 -
by
エピック・ゲームズ・ジャパン Epic Games Japan
PDF
超簡単!TortoiseSVNをWindowsにインストールする
by
Shin Tanigawa
PDF
emscriptenでC/C++プログラムをwebブラウザから使うまでの難所攻略
by
祐司 伊藤
PDF
オブジェクト指向プログラミングのためのモデリング入門
by
増田 亨
PDF
【Unite Tokyo 2018】さては非同期だなオメー!async/await完全に理解しよう
by
Unity Technologies Japan K.K.
PDF
C++ マルチスレッドプログラミング
by
Kohsuke Yuasa
PDF
【Unite 2018 Tokyo】そろそろ楽がしたい!新アセットバンドルワークフロー&リソースマネージャー詳細解説
by
Unity Technologies Japan K.K.
PPTX
プログラマが欲しい仕様書とは
by
Katsutoshi Makino
PDF
조정훈, 게임 프로그래머를 위한 클래스 설계, NDC2012
by
devCAT Studio, NEXON
PDF
홍성우, 내가 만든 언어로 게임 만들기, NDC2017
by
devCAT Studio, NEXON
xR Developerなら知っておきたいカメラの基礎知識
by
Satoshi Maemoto
ROSCon発表の振り返りとROSConの振り返り(ROS Japan UG #48 ROSCon 2022ふりかえり会)
by
Atsushi Hasegawa
猫でも分かる UE4のAnimation Blueprintの運用について
by
エピック・ゲームズ・ジャパン Epic Games Japan
Photon Fusionのはじめの一歩
by
聡 大久保
リアルタイムレイトレーシング時代を生き抜くためのデノイザー開発入門
by
Silicon Studio Corporation
GitHubの機能を活用したGitHub Flowによる開発の進め方
by
Takeshi Mikami
WebRTCの技術解説 第二版 公開版 完全版
by
Contest Ntt-west
私がスクラムをやめた理由 - 全員スクラムマスター。@DevLove -
by
Takao Oyobe
【Unite Tokyo 2018 Training Day】ProBuilderで学ぶレベルデザイン レベルデザインについて
by
Unity Technologies Japan K.K.
ビジュアルスクリプティングで始めるUnity入門1日目 プレイヤーを動かそう
by
Unity Technologies Japan K.K.
UE4のモバイル開発におけるコンテンツアップデートの話 - Chunk IDとの激闘編 -
by
エピック・ゲームズ・ジャパン Epic Games Japan
超簡単!TortoiseSVNをWindowsにインストールする
by
Shin Tanigawa
emscriptenでC/C++プログラムをwebブラウザから使うまでの難所攻略
by
祐司 伊藤
オブジェクト指向プログラミングのためのモデリング入門
by
増田 亨
【Unite Tokyo 2018】さては非同期だなオメー!async/await完全に理解しよう
by
Unity Technologies Japan K.K.
C++ マルチスレッドプログラミング
by
Kohsuke Yuasa
【Unite 2018 Tokyo】そろそろ楽がしたい!新アセットバンドルワークフロー&リソースマネージャー詳細解説
by
Unity Technologies Japan K.K.
プログラマが欲しい仕様書とは
by
Katsutoshi Makino
조정훈, 게임 프로그래머를 위한 클래스 설계, NDC2012
by
devCAT Studio, NEXON
홍성우, 내가 만든 언어로 게임 만들기, NDC2017
by
devCAT Studio, NEXON
Viewers also liked
PDF
挫折しないRedmine
by
Go Maeda
PDF
Tutorial for robot programming with LEGO mindstorms EV3
by
Hironobu Fujiyoshi
PPT
外乱光対策にまいまい式を使おう(ETロボコン2011東京連合第1回)
by
Yohei Onishi
PDF
ライントレースの改善法
by
noanoa07
PDF
画像認識 走行プレゼン
by
HanpenRobot
PDF
PID制御
by
robotclub_kut
PDF
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
PDF
LEGO Mindstorms ev3 ハンズオン資料 (2014年3月版)
by
Yoshitaka Seo
PDF
GR-KURUMIで倒立振子
by
Bizan Nishimura
PDF
ETロボコン活動 改善のヒント
by
Yukinobu Nishikawa
PDF
Etロボコンのすゝめ
by
kichimura
挫折しないRedmine
by
Go Maeda
Tutorial for robot programming with LEGO mindstorms EV3
by
Hironobu Fujiyoshi
外乱光対策にまいまい式を使おう(ETロボコン2011東京連合第1回)
by
Yohei Onishi
ライントレースの改善法
by
noanoa07
画像認識 走行プレゼン
by
HanpenRobot
PID制御
by
robotclub_kut
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
LEGO Mindstorms ev3 ハンズオン資料 (2014年3月版)
by
Yoshitaka Seo
GR-KURUMIで倒立振子
by
Bizan Nishimura
ETロボコン活動 改善のヒント
by
Yukinobu Nishikawa
Etロボコンのすゝめ
by
kichimura
Similar to 自律走行ロボットをプログラミングするということ ~ETロボコンの場合~
PDF
つくばチャレンジ2023シンポジウム 発表資料
by
Koichi Hikawa
PDF
C#/Java & Linux で始める ET ロボコン
by
Shin-ya Koga
PPTX
ETロボコンのすすめ
by
Hiroyuki Takahashi
PDF
自律ドローンのサーベイ資料
by
fumi_maker
PDF
Orientation
by
Thomath M
PPT
Kosenconf numazu Free Session5
by
Yuichiro Kobayashi
PPTX
ETロボについて
by
Futa HIRAKOBA
PDF
2017 06-04.overview
by
Shin-ya Koga
PDF
2017 05-21.overview
by
Shin-ya Koga
PPTX
Summer camp2018 group4
by
openrtm
PDF
私の失敗道(仮)
by
Yuuki Tan-nai
つくばチャレンジ2023シンポジウム 発表資料
by
Koichi Hikawa
C#/Java & Linux で始める ET ロボコン
by
Shin-ya Koga
ETロボコンのすすめ
by
Hiroyuki Takahashi
自律ドローンのサーベイ資料
by
fumi_maker
Orientation
by
Thomath M
Kosenconf numazu Free Session5
by
Yuichiro Kobayashi
ETロボについて
by
Futa HIRAKOBA
2017 06-04.overview
by
Shin-ya Koga
2017 05-21.overview
by
Shin-ya Koga
Summer camp2018 group4
by
openrtm
私の失敗道(仮)
by
Yuuki Tan-nai
More from Shin-ya Koga
PDF
品質管理グループ Linux 勉強会
by
Shin-ya Koga
PPTX
2021 10-12.linx device-tree
by
Shin-ya Koga
PDF
2014年の社内新人教育テキスト #1(プログラミング言語概論)
by
Shin-ya Koga
PDF
2022-09-15.studyMeeting.pdf
by
Shin-ya Koga
PDF
デバイスからクラウドへ ~組み込みエンジニアと IoT
by
Shin-ya Koga
PDF
2021 12-02.koga.lecture note-revised
by
Shin-ya Koga
PDF
OSC 2012 Hokkaido でのプレゼン資料
by
Shin-ya Koga
PDF
Android が巨大すぎてお困りのあなたへ~組み込み Windows の今と、これから~
by
Shin-ya Koga
PDF
2018 08-31.946oss revised
by
Shin-ya Koga
PDF
仮想化って何だろう_______________________________
by
Shin-ya Koga
PDF
2019 05-19.overview
by
Shin-ya Koga
PDF
IoT あるじゃん北海道支部勉強会
by
Shin-ya Koga
PDF
コードを書かずにLチカ。から始めよう
by
Shin-ya Koga
PDF
CLR/H 第 79 回勉強会での LT
by
Shin-ya Koga
PDF
組み込みから IoT へ
by
Shin-ya Koga
PDF
組み込みでもマルチコア。WEC2013での対応
by
Shin-ya Koga
PDF
2014年の社内新人教育テキスト #3(オブジェクト指向言語ふりかえり)
by
Shin-ya Koga
PDF
Universal Apps (UWP)
by
Shin-ya Koga
PPTX
2014年の社内新人教育テキスト #2(関数型言語からオブジェクト指向言語へ)
by
Shin-ya Koga
PDF
正解は一つじゃない: 選択肢と最適解
by
Shin-ya Koga
品質管理グループ Linux 勉強会
by
Shin-ya Koga
2021 10-12.linx device-tree
by
Shin-ya Koga
2014年の社内新人教育テキスト #1(プログラミング言語概論)
by
Shin-ya Koga
2022-09-15.studyMeeting.pdf
by
Shin-ya Koga
デバイスからクラウドへ ~組み込みエンジニアと IoT
by
Shin-ya Koga
2021 12-02.koga.lecture note-revised
by
Shin-ya Koga
OSC 2012 Hokkaido でのプレゼン資料
by
Shin-ya Koga
Android が巨大すぎてお困りのあなたへ~組み込み Windows の今と、これから~
by
Shin-ya Koga
2018 08-31.946oss revised
by
Shin-ya Koga
仮想化って何だろう_______________________________
by
Shin-ya Koga
2019 05-19.overview
by
Shin-ya Koga
IoT あるじゃん北海道支部勉強会
by
Shin-ya Koga
コードを書かずにLチカ。から始めよう
by
Shin-ya Koga
CLR/H 第 79 回勉強会での LT
by
Shin-ya Koga
組み込みから IoT へ
by
Shin-ya Koga
組み込みでもマルチコア。WEC2013での対応
by
Shin-ya Koga
2014年の社内新人教育テキスト #3(オブジェクト指向言語ふりかえり)
by
Shin-ya Koga
Universal Apps (UWP)
by
Shin-ya Koga
2014年の社内新人教育テキスト #2(関数型言語からオブジェクト指向言語へ)
by
Shin-ya Koga
正解は一つじゃない: 選択肢と最適解
by
Shin-ya Koga
自律走行ロボットをプログラミングするということ ~ETロボコンの場合~
1.
自律走行ロボットを プログラミングするということ ~ET ロボコンの場合 古賀信哉 ETロボコン北海道地区実行委員会
2.
はじめに ET ロボコンの紹介 自律自立と走行 センサで回りと自分を見る 自律走行へ挑戦するために
3.
ET ロボコンの紹介
4.
どんなコンテスト? 目的 開催概要 若手技術者や学生向けの学習の場を提供・育成 自律走行ロボットの、走行実技と設計モデルを競う 年間スケジュール 実施説明会 技術教育1、2 +
試走会1、2 モデル提出~モデル審査 地区大会実技コンテスト(一般公開) 全国チャンピオンシップ大会
5.
ロボットで何をやるの? 競技コース 黒いラインを引いたコース 光センサを使ってライントレース 途中には、坂道やカーブもあり 基本コースのゴール後に難所あり 階段、シーソー 機体を傾けないと通れない高さのゲート
6.
ロボットで何をやるの? 競技コース 黒いラインを引いたコース 光センサを使ってライントレース 途中には、坂道やカーブもあり 基本コースのゴール後に難所あり 階段、シーソー 機体を傾けないと通れない高さのゲート 「アーキテクト部門」を新設。 パフォーマンスステージ(新設!)
ベーシックコース後の自由パフォーマンス
7.
何を競うの? 走行実技 共通のハードウェアを使う ソフトウェアの出来を競う 設計モデル
構造モデルと振る舞いモデルを中心に記述 「これは走りそうだ」と分かる内容は高評価
8.
何が難しいの? ちゃんと走らせること 直進コースを直進し、カーブで曲がる 坂道で倒れず、ラインを見失わない
難所に着いたことを検出して動きを変える ちゃんと設計すること 構造、振る舞いのモデルの一貫性(UML) 前提の適切さ、仮説と検証の妥当性(性能)
9.
何を使うの? 機体 LEGO Mindstorms NXT OS
とプラットフォーム nxtOSEK (TOPPERS/JSP, etc.) (OSS) プログラミング環境 Cygwin/gcc (OSS): C 言語 ARM ツールチェイン
10.
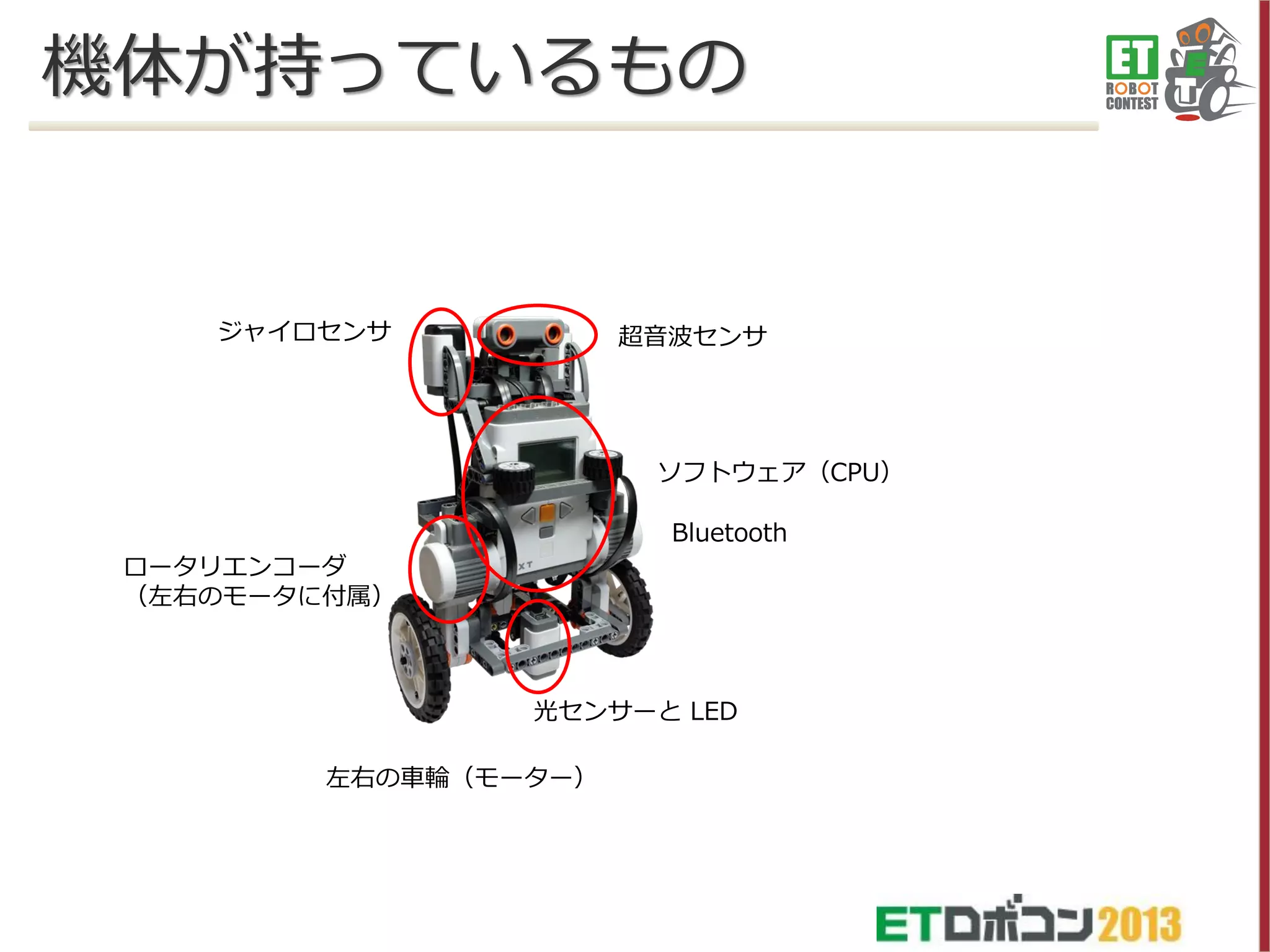
機体が持っているもの ジャイロセンサ 超音波センサ ソフトウェア(CPU) Bluetooth ロータリエンコーダ (左右のモータに付属) 光センサーと LED 左右の車輪(モーター)
11.
自立と走行 ~自律の前に、まず自立
12.
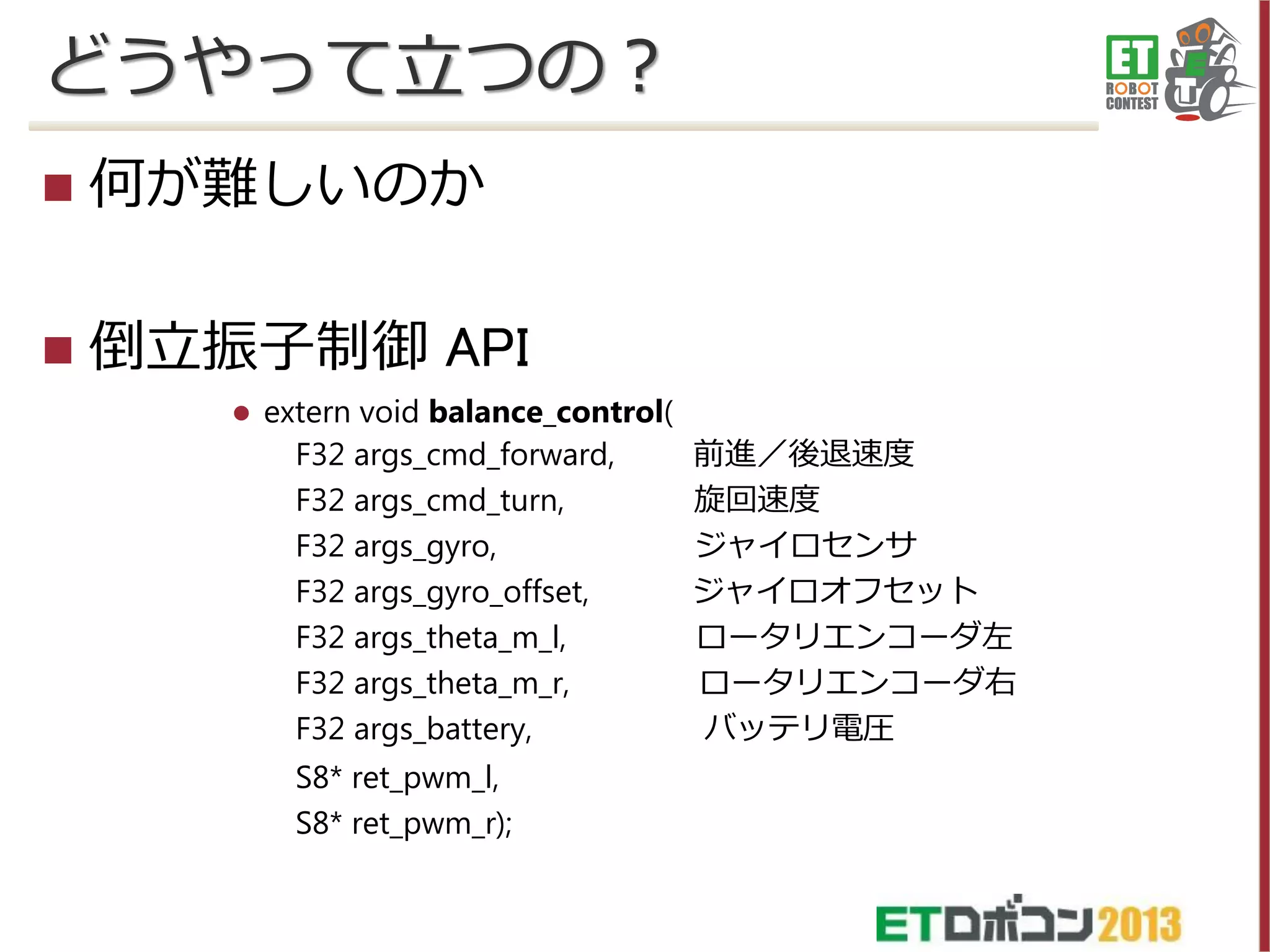
どうやって立つの? 何が難しいのか 倒立振子制御 API extern void
balance_control( F32 args_cmd_forward, F32 args_cmd_turn, F32 args_gyro, F32 args_gyro_offset, F32 args_theta_m_l, F32 args_theta_m_r, F32 args_battery, S8* ret_pwm_l, S8* ret_pwm_r); 前進/後退速度 旋回速度 ジャイロセンサ ジャイロオフセット ロータリエンコーダ左 ロータリエンコーダ右 バッテリ電圧
13.
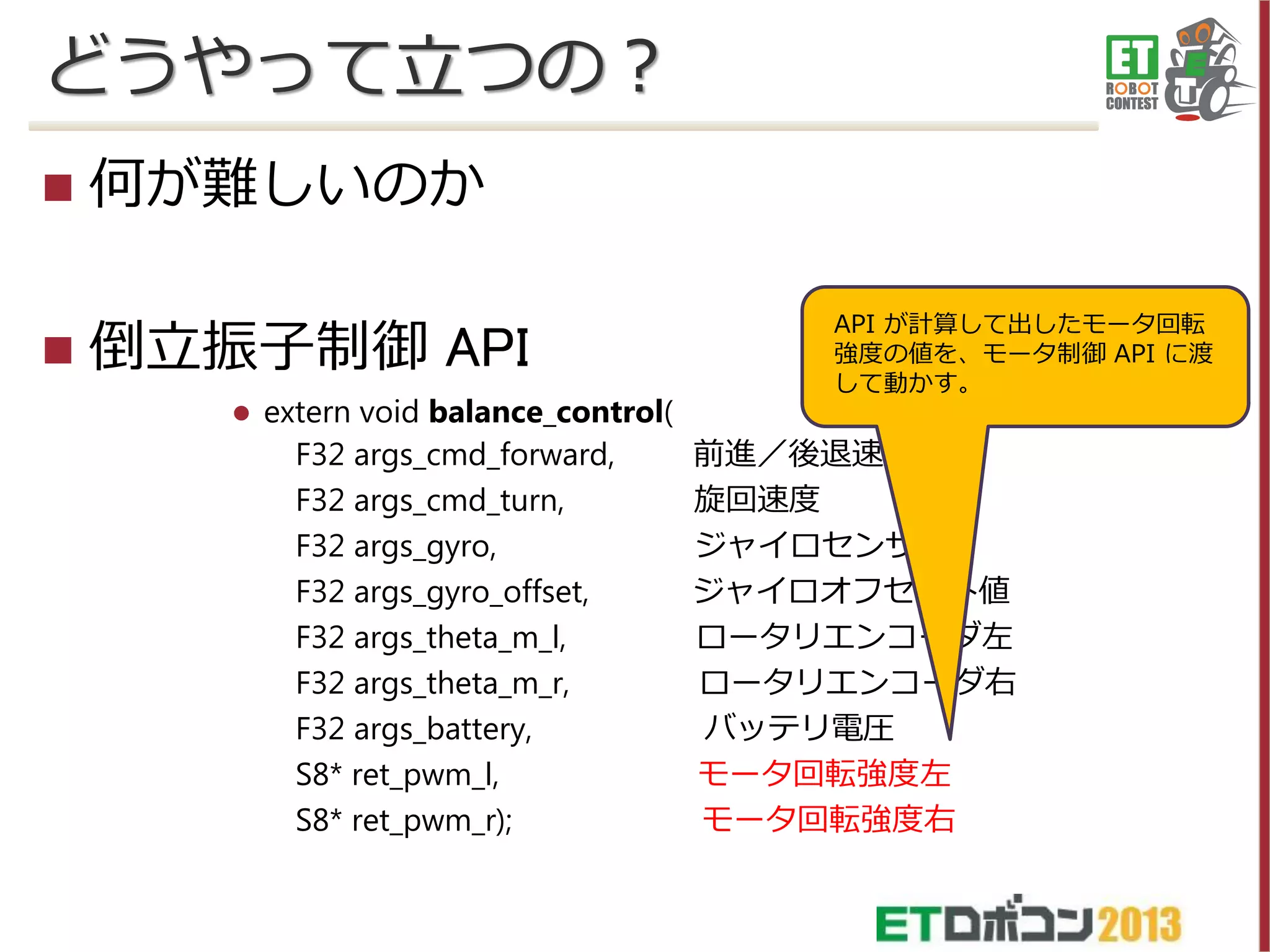
どうやって立つの? 何が難しいのか 倒立振子制御 API extern void
balance_control( F32 args_cmd_forward, F32 args_cmd_turn, F32 args_gyro, F32 args_gyro_offset, F32 args_theta_m_l, F32 args_theta_m_r, F32 args_battery, S8* ret_pwm_l, S8* ret_pwm_r); API が計算して出したモータ回転 強度の値を、モータ制御 API に渡 して動かす。 前進/後退速度 旋回速度 ジャイロセンサ値 ジャイロオフセット値 ロータリエンコーダ左 ロータリエンコーダ右 バッテリ電圧 モータ回転強度左 モータ回転強度右
14.
デモで分かること(倒立制御) 完全静止できない!
15.
デモで分かること(倒立制御) 完全静止できない! 倒立制御では、ジャイロセンサの値を 見ながら、倒れないように車輪を小刻 みに動かします。 車輪が動くので、静止できません。
16.
走行するには 倒立振子制御 API 静止の場合と API
は同じ 前進・後退 前進・後退速度を指定 右旋回・左旋回 旋回速度を指定
17.
デモで分かること(走行制御) 直進しない!
18.
デモで分かること(走行制御) 直進しない! 同じ回転強度をモータ制御 API に指定 しても、左右のモータの特性が違いま す。思った通りには直進しません。 車輪の取り付けがわずかに左右ずれて いれば、それも影響します。
19.
自立と走行(まとめ) 自立の仕組み ジャイロセンサで傾き動作(角速度)検出 傾きを解消するために車輪を動かす ジャイロセンサ
API と倒立振子制御計算 API モーター制御 API 課題 倒立振子は静止しない まっすぐ走らない 車は急に止まらない・走らない
20.
自立と走行(まとめ) 自立の仕組み ジャイロセンサで傾き動作(角速度)検出 傾きを解消するために車輪を動かす ジャイロセンサ
API と倒立振子制御計算 API モーター制御 API 課題 倒立振子は静止しない まっすぐ走らない 前進・後退中に速度を一気に落とすと、 簡単に転倒します! 車は急に止まらない・走らない
21.
センサで回りと自分を見る ~目を開いてみよう
22.
機体に装着されたセンサの一覧 ジャイロセンサ:角速度 光センサと LED ロータリエンコーダ 超音波センサ タッチセンサ:スタート指示に使える
23.
地面の色(明るさ)を見る 光センサと LED:反射光 地面の色が反射光の強さに対応 デモで分かること
24.
車輪の動きで自分の動きを知る ロータリエンコーダ:車輪の回転角 剛体モデルで考える デモで分かること
25.
前方障害物との距離を知る 超音波センサ:前方物体までの距離 距離計測の仕組み デモで分かること
26.
センサで回りと自分を見る(まとめ) センサで検出できるもの 傾き角度動作: ジャイロセンサ 左右の車輪の回転角:
ロータリエンコーダ 前方物体との距離: 超音波センサ 課題 光センサからの入力値は不安定 外乱光 倒立振子機体の傾き動作 センサ自体の精度
27.
センサで回りと自分を見る(まとめ) 課題(続き) 足元の障害物は検出できない(難所攻略時) どうやれば? 理想モデルと実データのかい離 まずは実測! 実測に基づいてモデルを修正
28.
自律走行へ挑戦するために
29.
自律って何だろう ライントレース? 自分を知る、世界を知る
30.
制御動作の最適化 車は急に止まれない、曲がれない 比例制御 積分制御、微分制御
31.
自己位置推定 剛体モデルで計算 推定結果と現実の違いを補正
32.
難所攻略 階段に出くわしたことを知るには 走り過ぎて落ちないために シーソーを通り抜ける
33.
ライントレースの精度を上げる 外乱の影響をどうやって防ぐ? 自己位置推定を補完 「チェックポイント」を作ろう 適応型にするために
34.
これから始めるには ET ロボコン http://www.etrobo.jp/2013/ LEGO
Mindstorms NXT の入手先 http://www.afrel.co.jp/lineup/robocon http://afrel-shop.com/shopdetail/008000000003/order/ NXT 拡張ファームウェアと nxtOSEK の入手先 http://lejos-osek.sourceforge.net/jp/installation_enf.htm
35.
仕組みをもっと知っておこう nxtOSEKのタスク/スレッド仕様 nxtOSEK/toppers_osek/doc/ リアルタイム処理用の優先度仕様 Etrobo
APIの内部 センサからの入力をどう受け取っているか ハードウェアの特性 センサやモータのばらつき、入力・応答特性 電池の残量の違いにも注意
36.
仕組みをもっと知っておこう nxtOSEKのタスク/スレッド仕様 nxtOSEK/toppers_osek/doc/ リアルタイム処理用の優先度仕様 スリープ関数がスリープしない(busy loop
による待ち動作)なので要注意! Etrobo APIの内部 マルチスレッド実装は「周期アラーム」が 便利。 センサからの入力をどう受け取っているか ハードウェアの特性 センサやモータのばらつき、入力・応答特性 電池の残量の違いにも注意
37.
ここから先は、みなさんで 今日のプレゼンで使ったソースコード 以下のページで公開しています: http://www.stprec.co.jp/project/
Download