基於光度立體與深度學習的高反光金屬表面瑕疵檢測系統
成員:田O東、陳O琳、田O萱、蘇O維、王O瑄、廖O傑、陳O諺、蔡O騏、吳O儀
專題網頁:https://ittrainingclub.pse.is/114-7-25-AI
艾鍗官網:https://www.ittraining.com.tw/
聯絡信箱:service@ittraining.com.tw
<專題摘要>
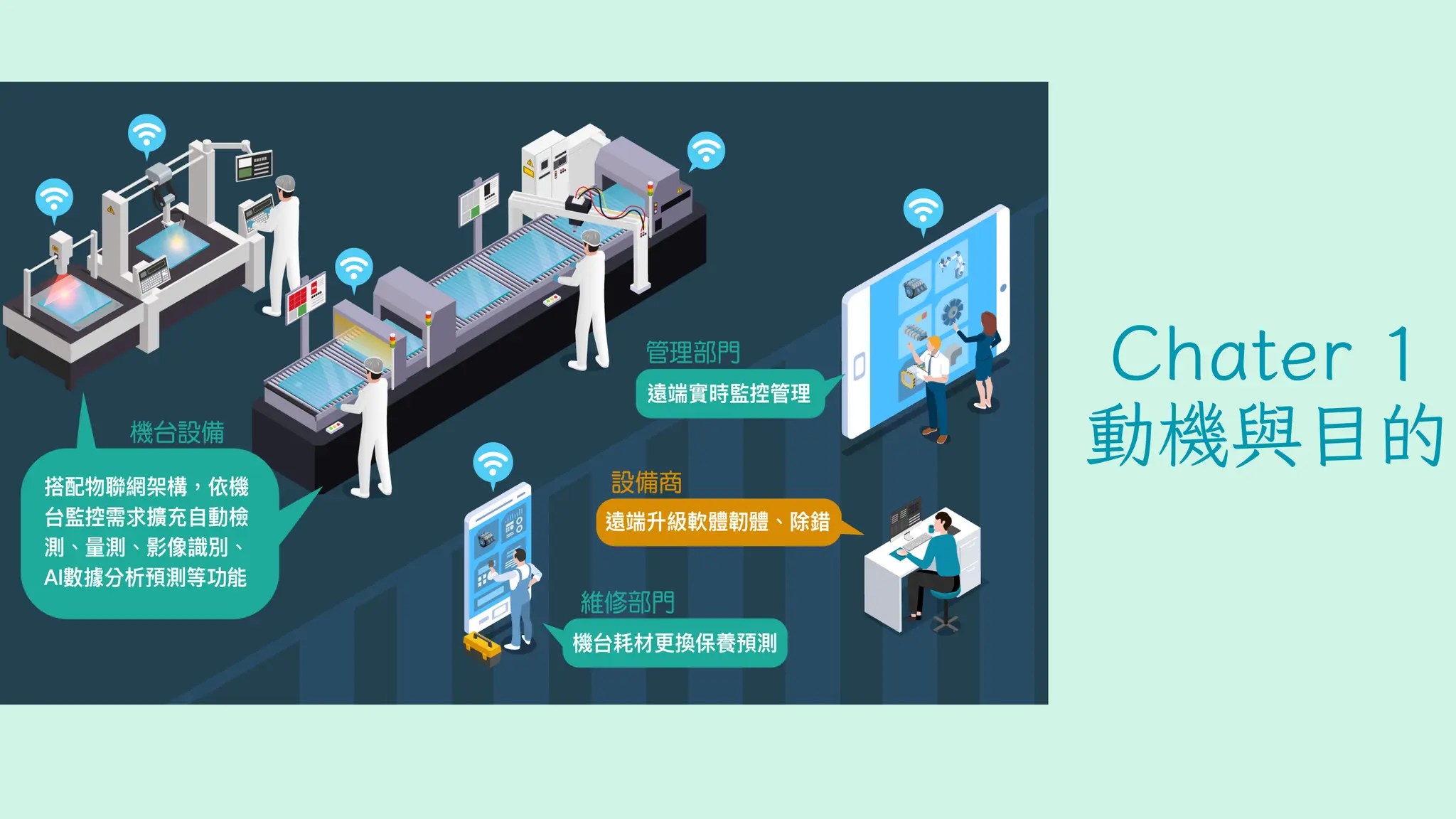
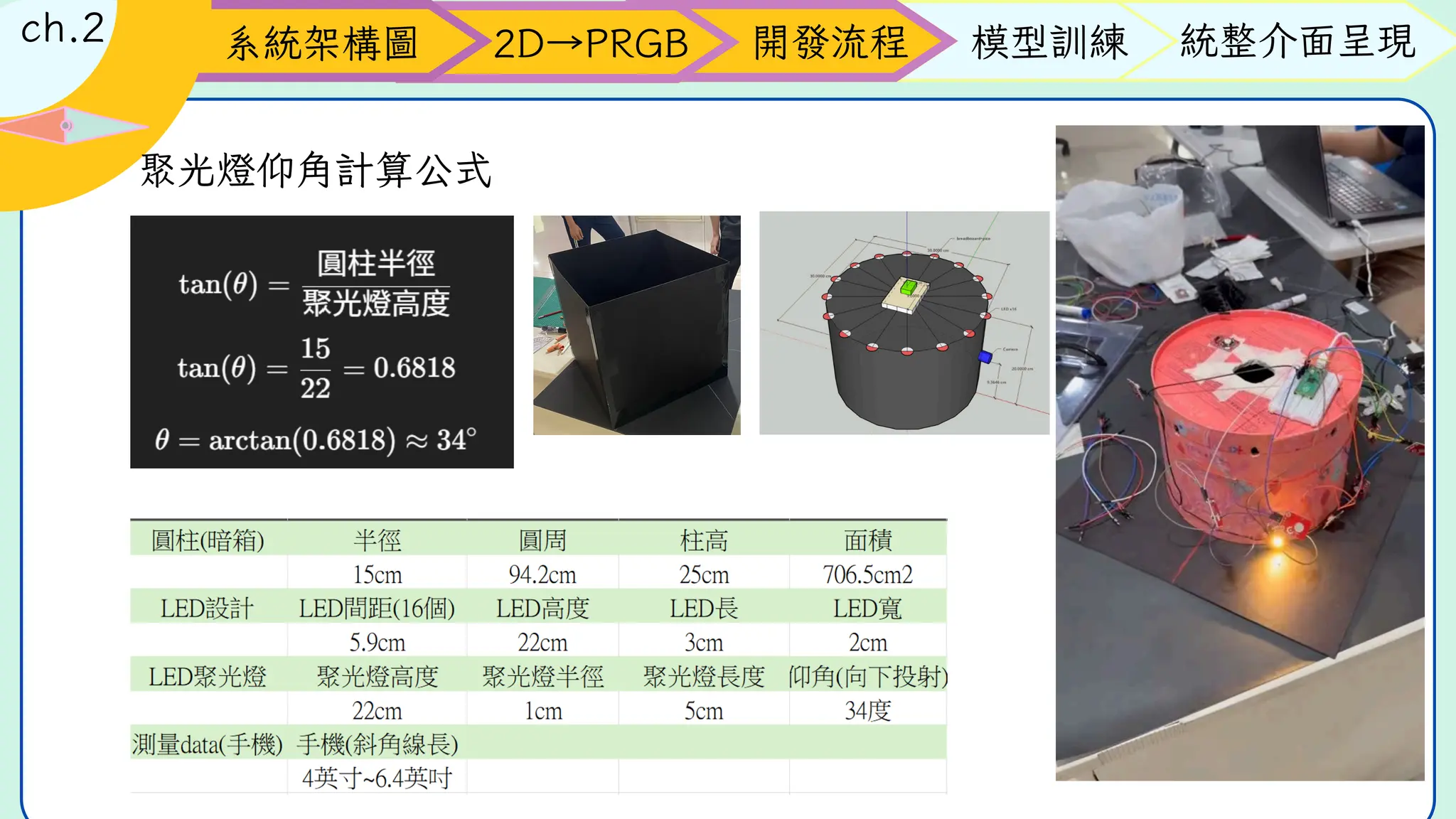
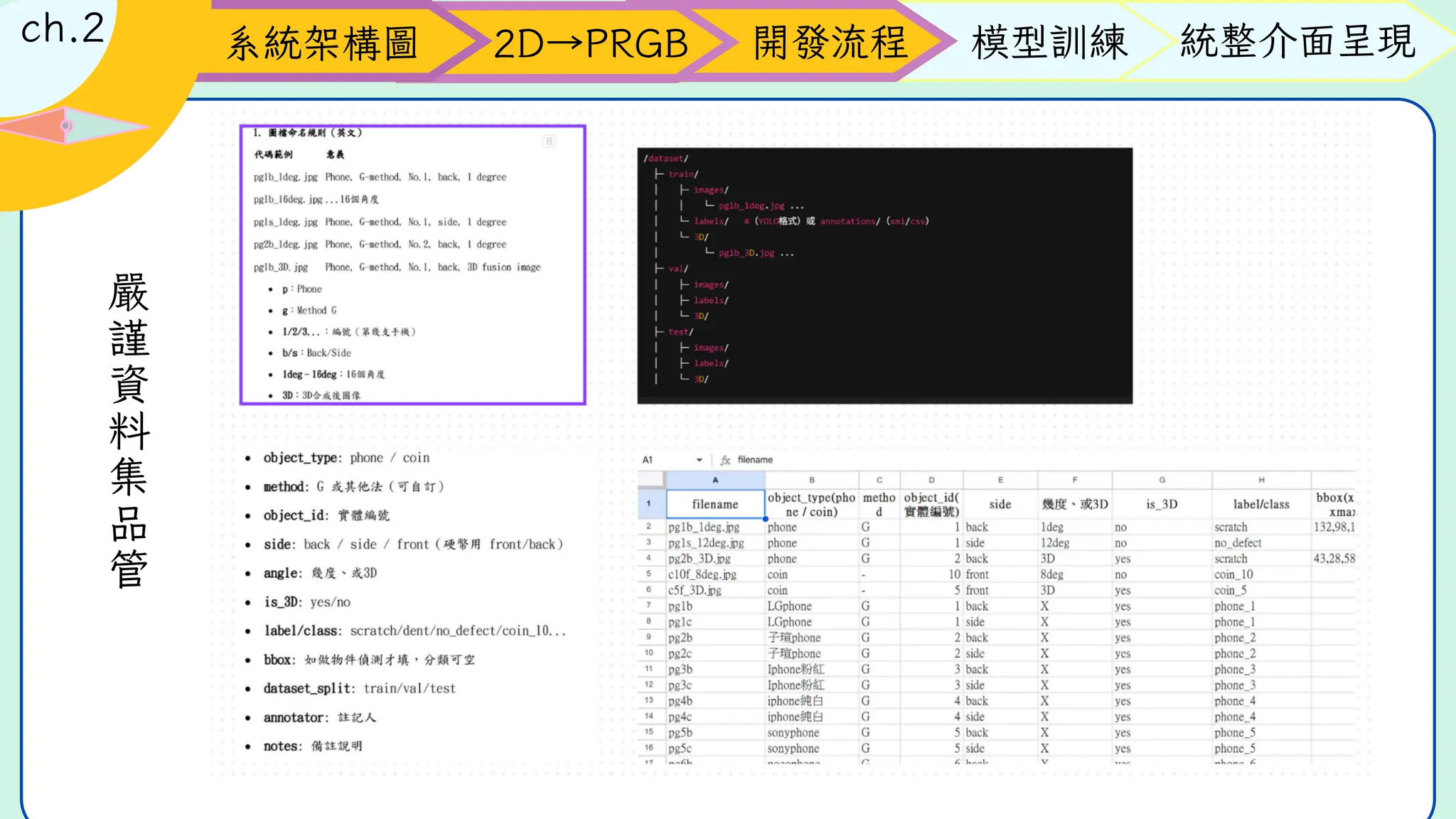
本專題針對高反光金屬表面在自動化製程中常見的光影干擾問題,提出一套結合光度立體(Photometric Stereo)與深度學習的 AI 視覺瑕疵檢測系統。面對不鏽鋼、鋁鎂合金、鍍鉻等高鏡面材質,傳統影像系統易因反射與陰影誤判,無法滿足高精度製程對品質控管的需求。
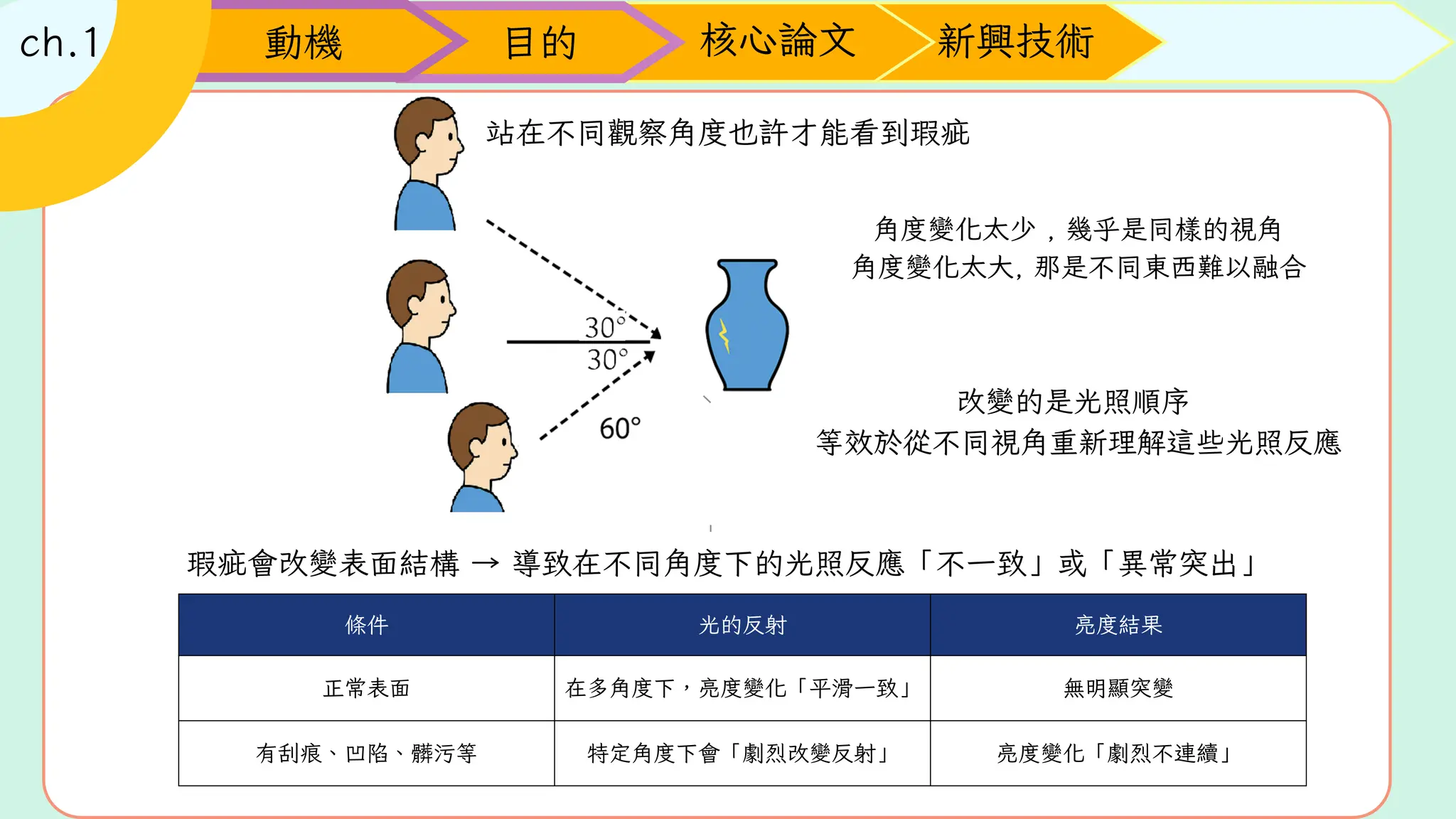
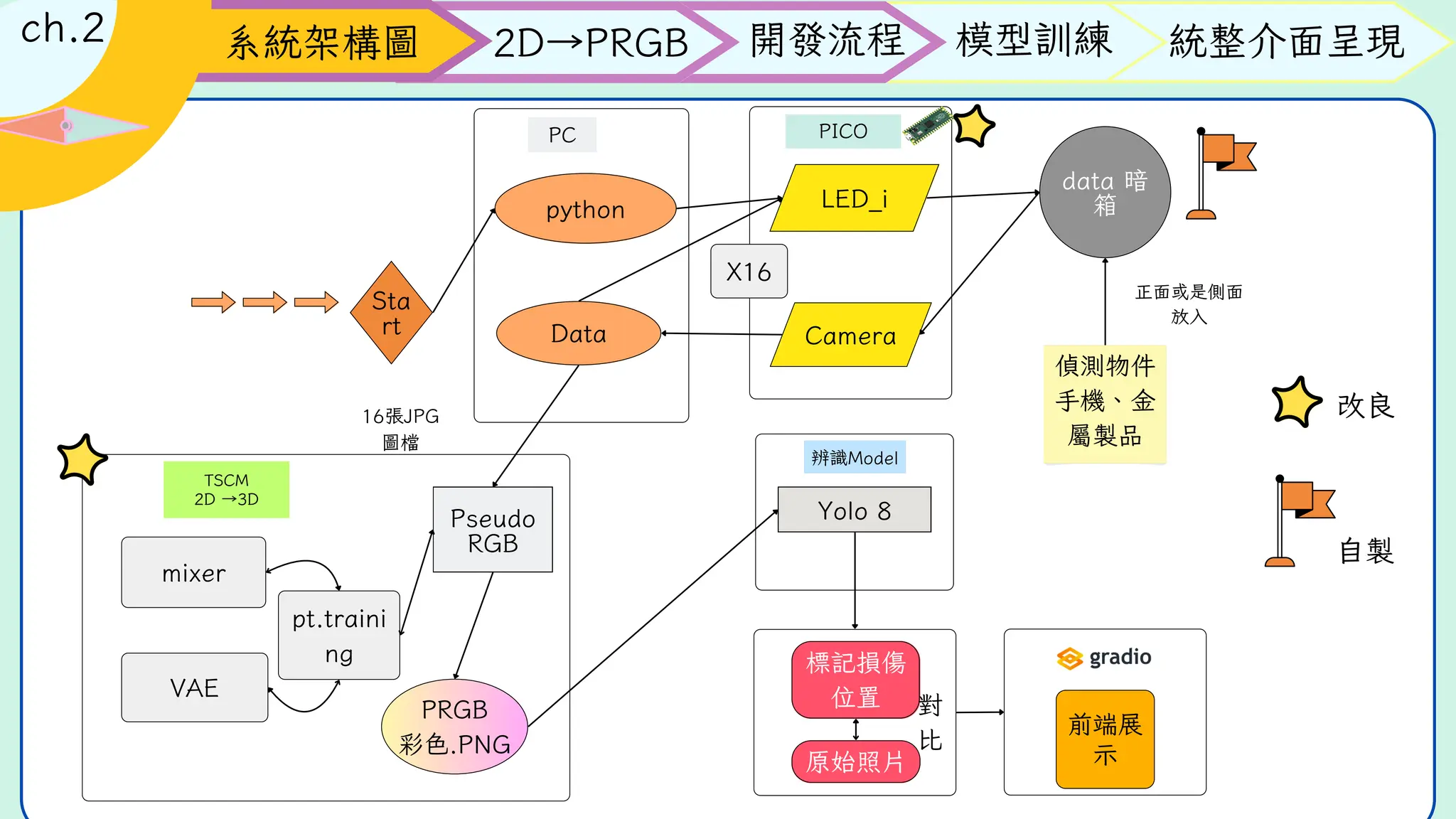
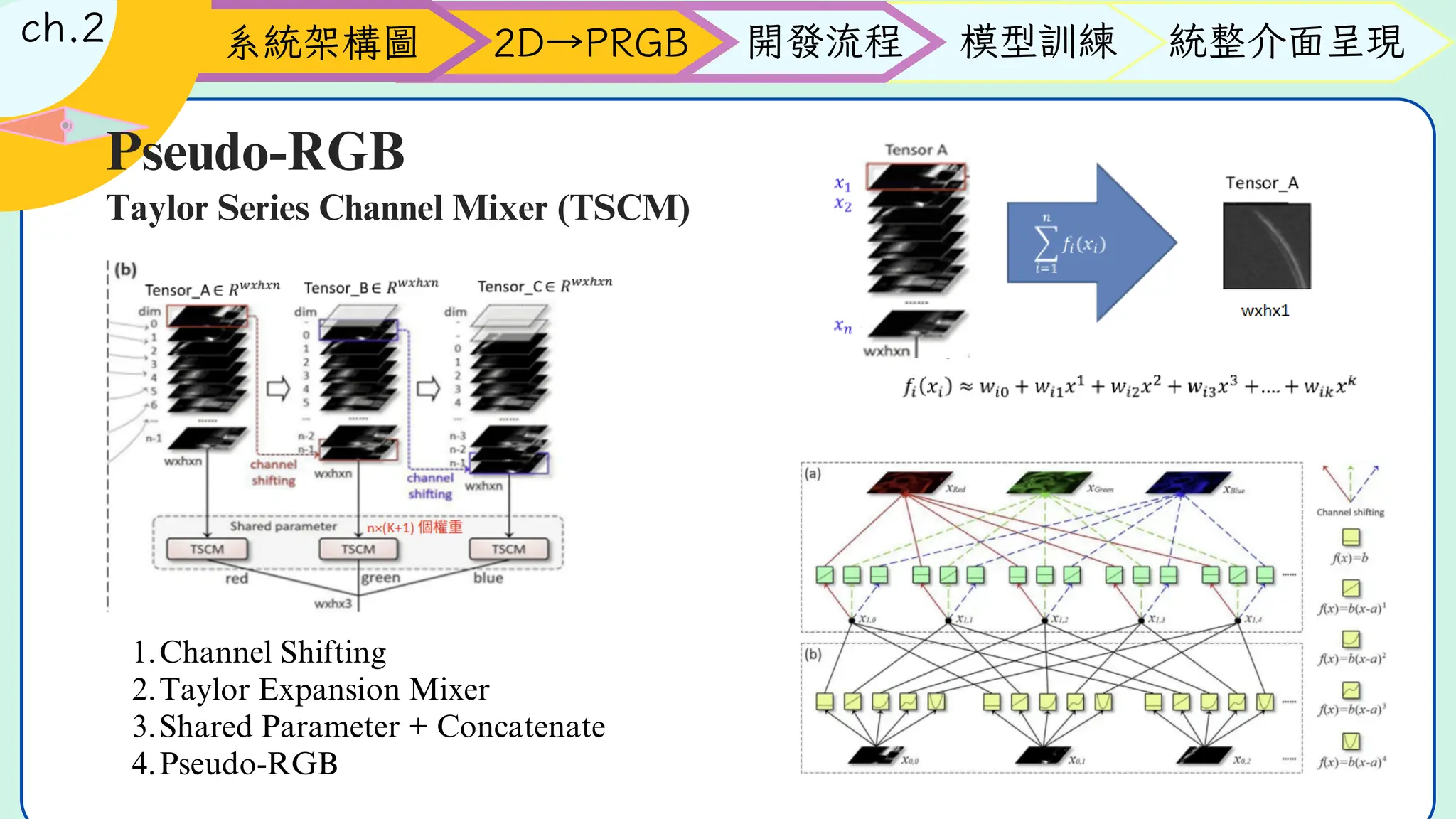
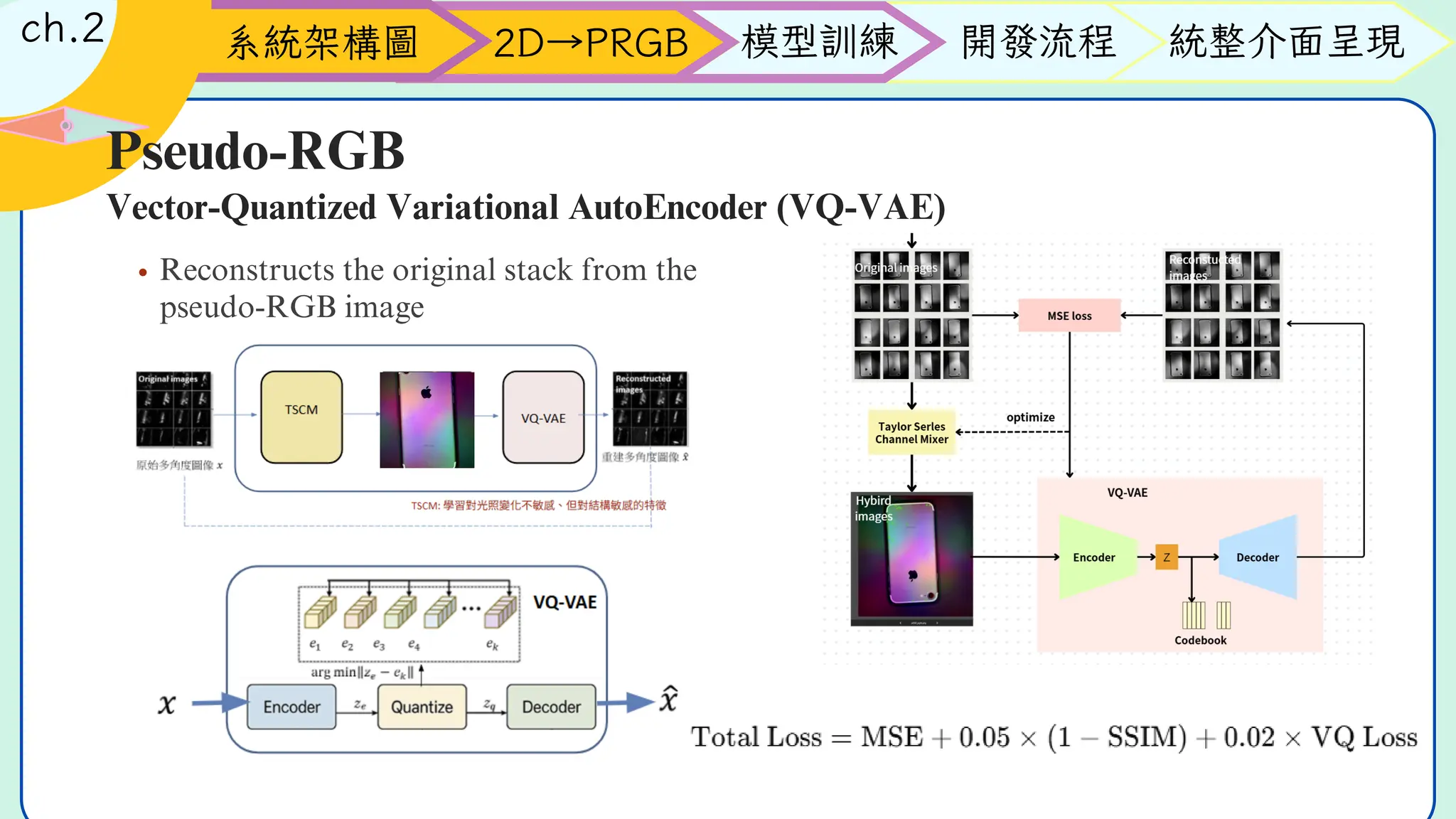
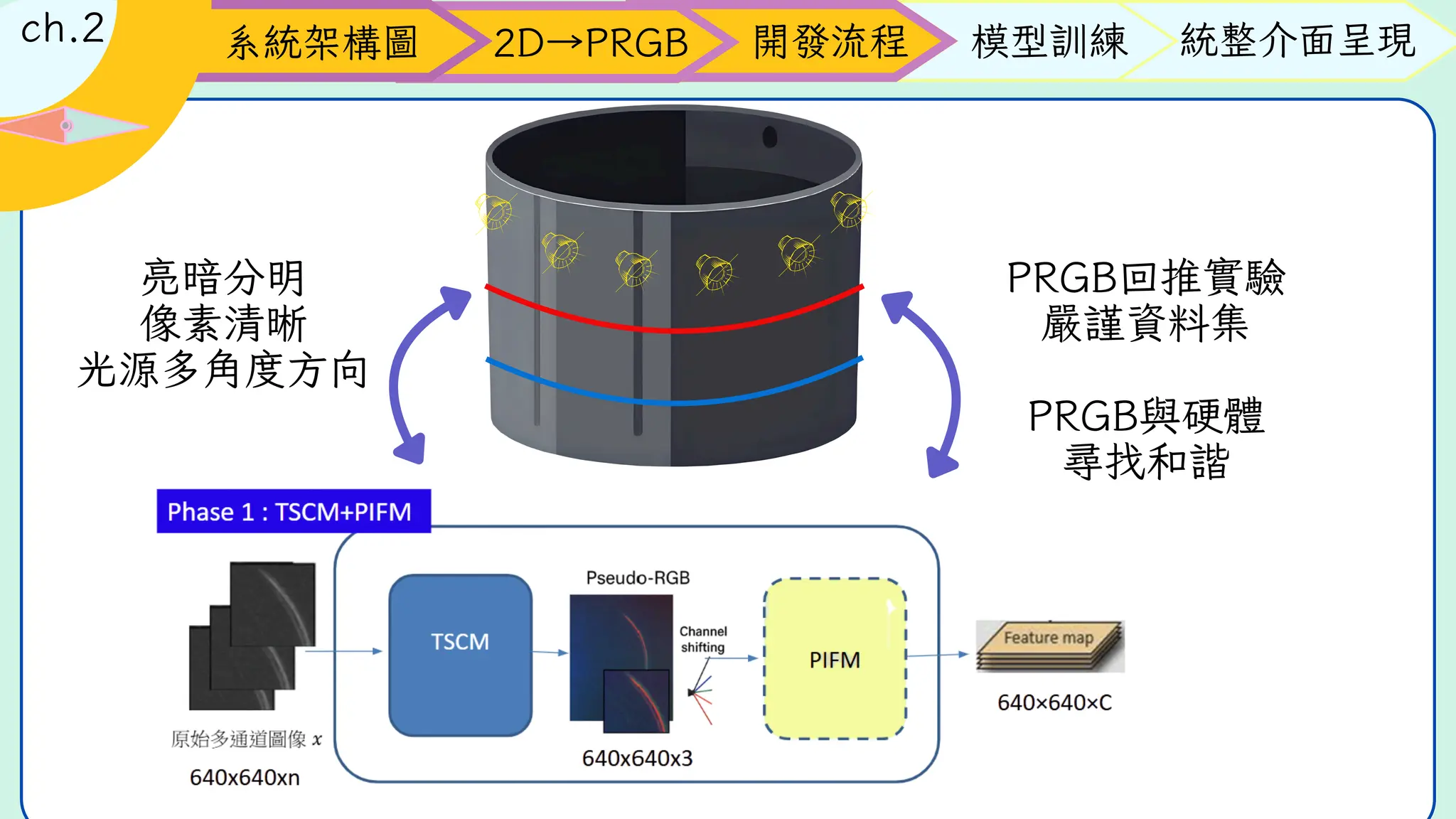
本系統以固定視角拍攝 8 張不同方向光源下的灰階影像,首先透過 channel shift 技術模擬人眼從多角度觀察物體表面的效果,接著使用 TSCM 模組(光照加權整合)進行亮度融合,最後將結果映射為具幾何敏感性的 pseudo-RGB 圖像。此步驟能有效強化刮痕、凹陷、污漬等瑕疵的顯著性,大幅提升辨識穩定性與可視性。
完成 pseudo-RGB 轉換後,輸入 YOLOv8 進行即時瑕疵定位與分類,實驗結果在 mAP@50 可達 0.86。系統具備模型自學與參數調整能力,能動態適應不同材質與製程條件。未來規劃結合異常偵測模型與多模態感測器,應用於半導體、汽車零件與高階精密產線,提供穩定且可擴展的智慧品管解決方案。

































![吉伊卡哇臉盲辨識器 - 艾鍗學院學員專題 [AI人工智慧與邊緣運算工程師班]](https://cdn.slidesharecdn.com/ss_thumbnails/5-241108100914-50424585-thumbnail.jpg?width=640&height=640&fit=bounds)
![AI 語音複製 X 翻譯 - 艾鍗學院學員專題 [AI人工智慧與邊緣運算工程師班]](https://cdn.slidesharecdn.com/ss_thumbnails/3aixv4-googleppt-241108100906-87502164-thumbnail.jpg?width=640&height=640&fit=bounds)
![以人工智能打造企業內部知識管理系統以PCB板為例 - 艾鍗學院學員專題 [AI人工智慧與邊緣運算工程師班]](https://cdn.slidesharecdn.com/ss_thumbnails/1v9-241108100905-c32c0a44-thumbnail.jpg?width=640&height=640&fit=bounds)














