Download as PDF, PPTX

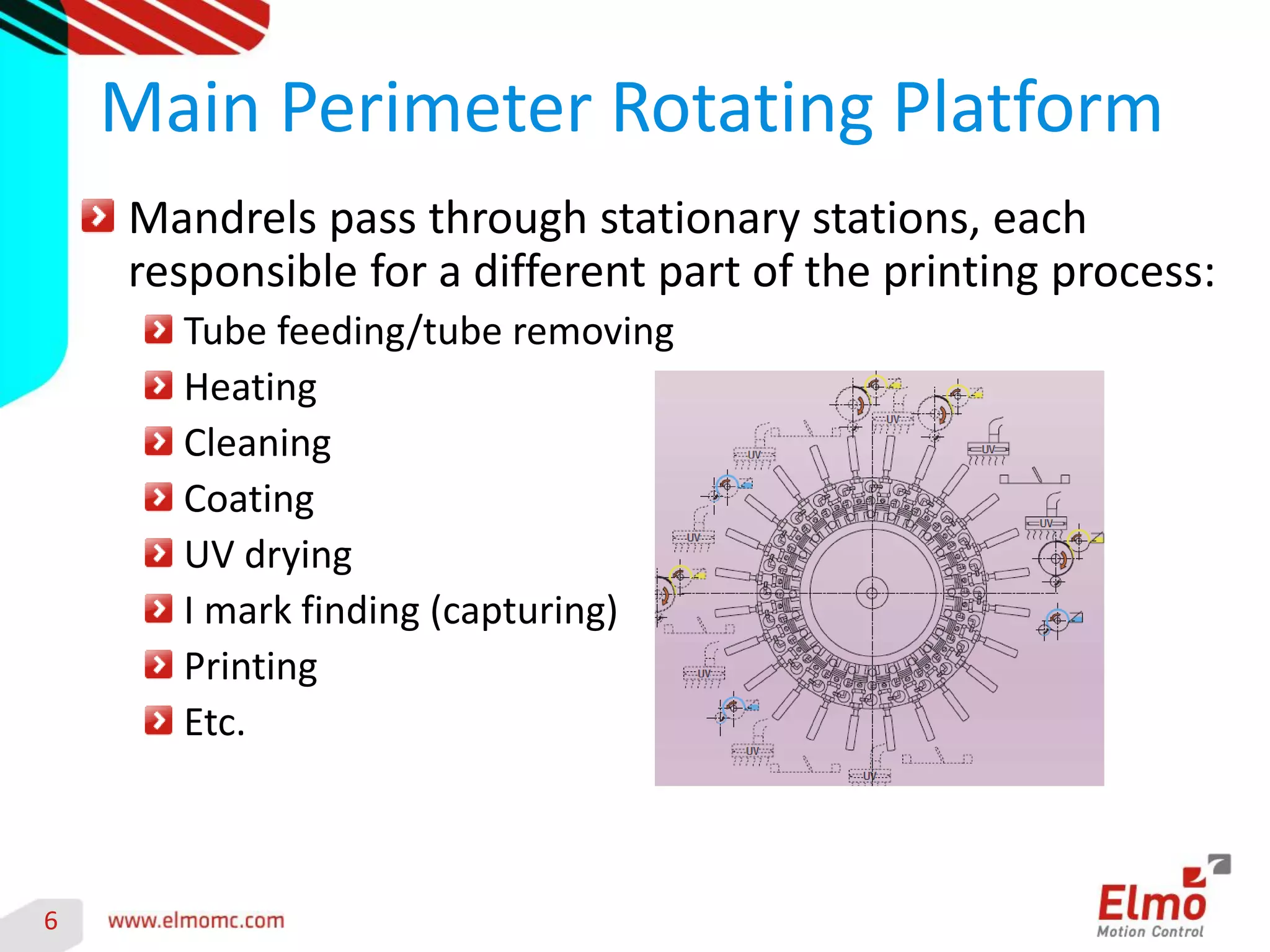
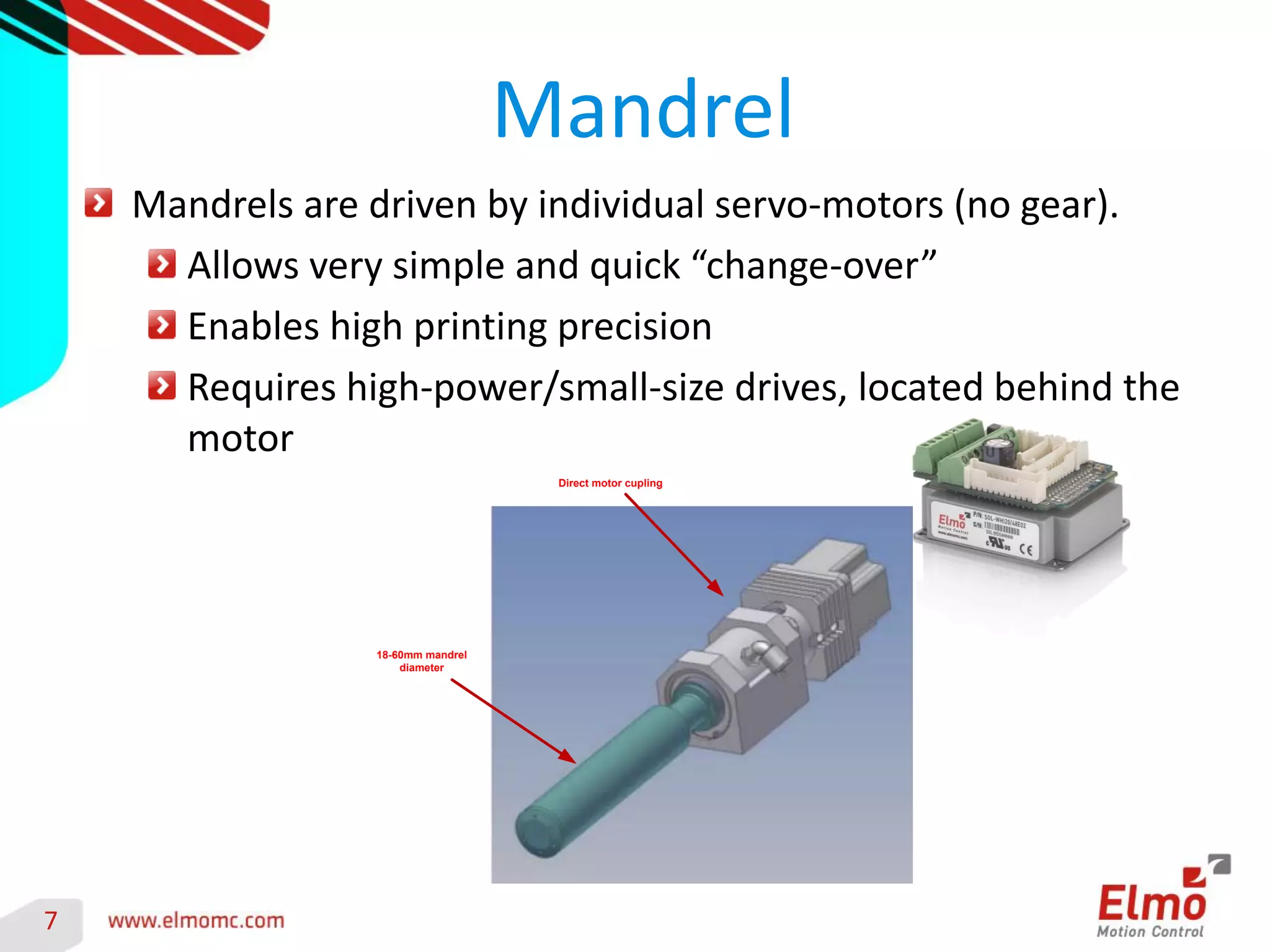
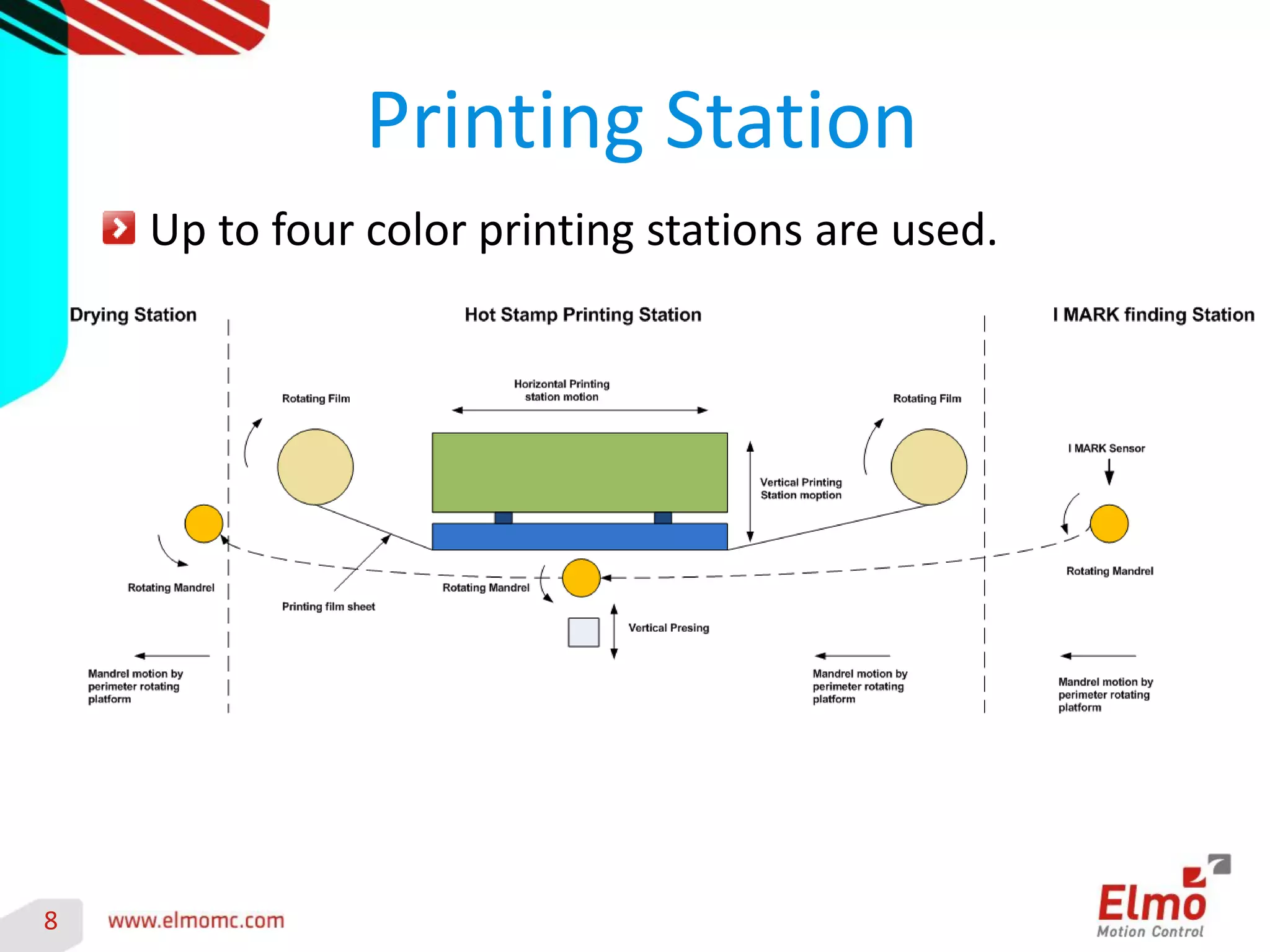
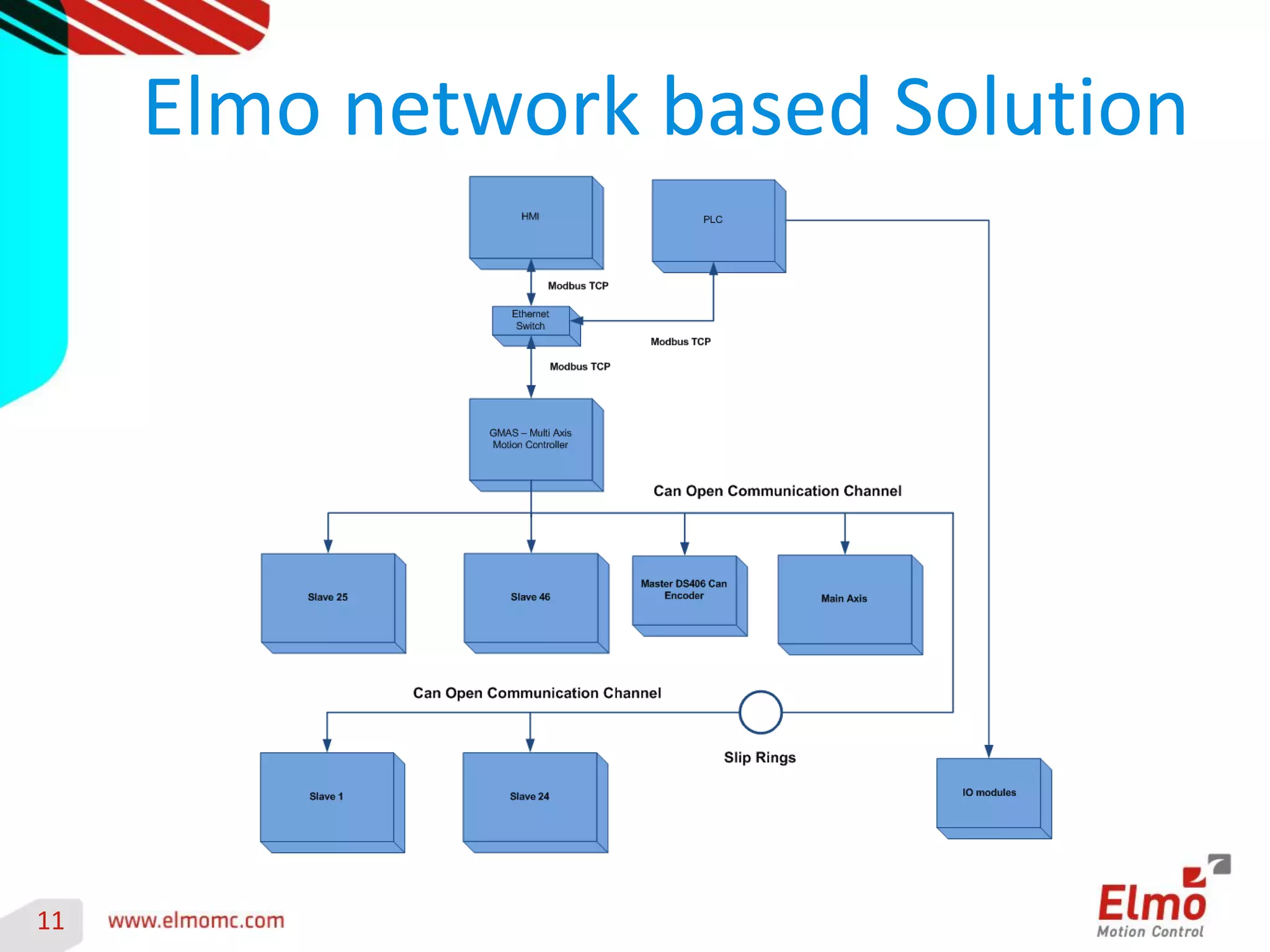
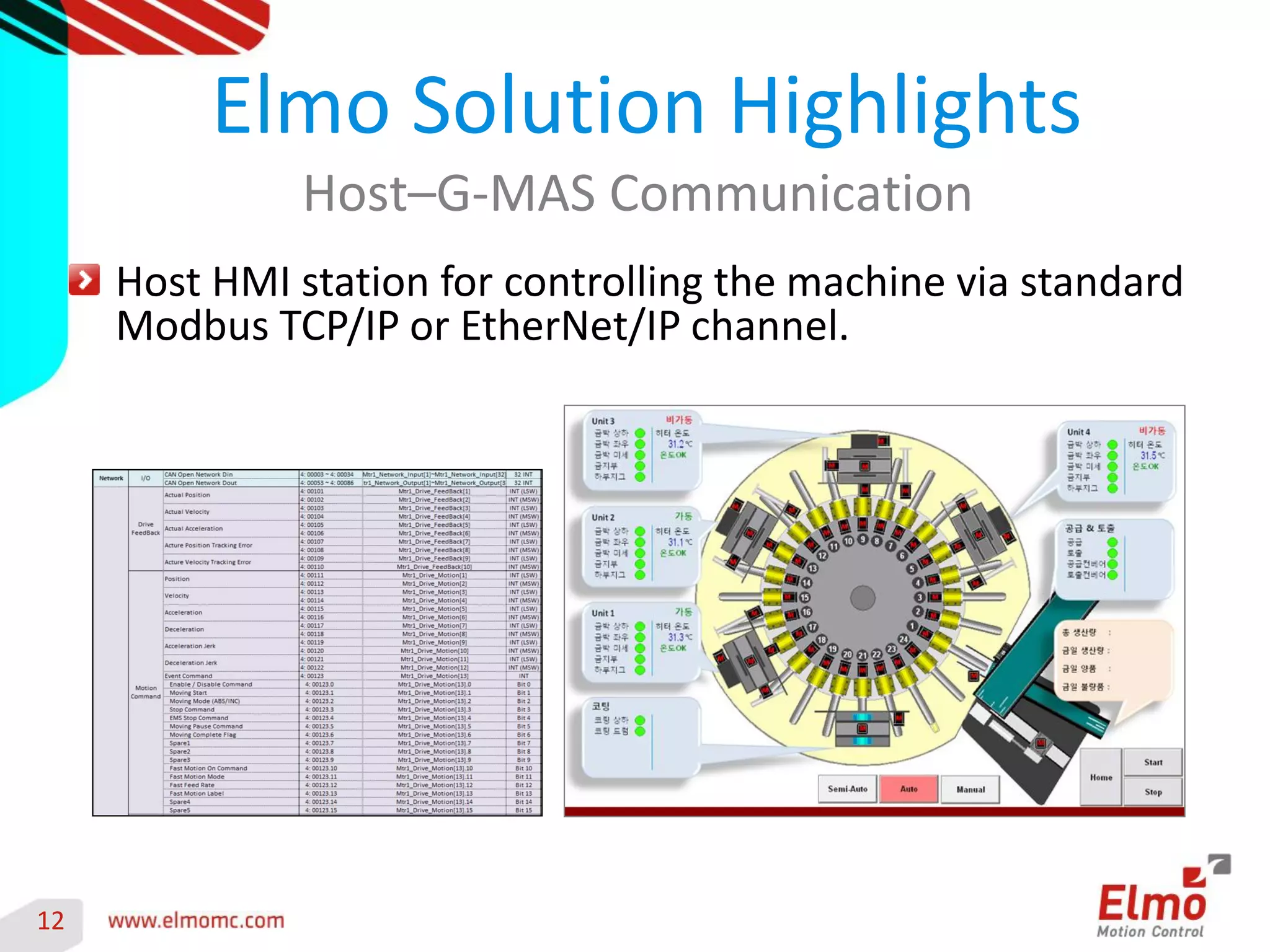
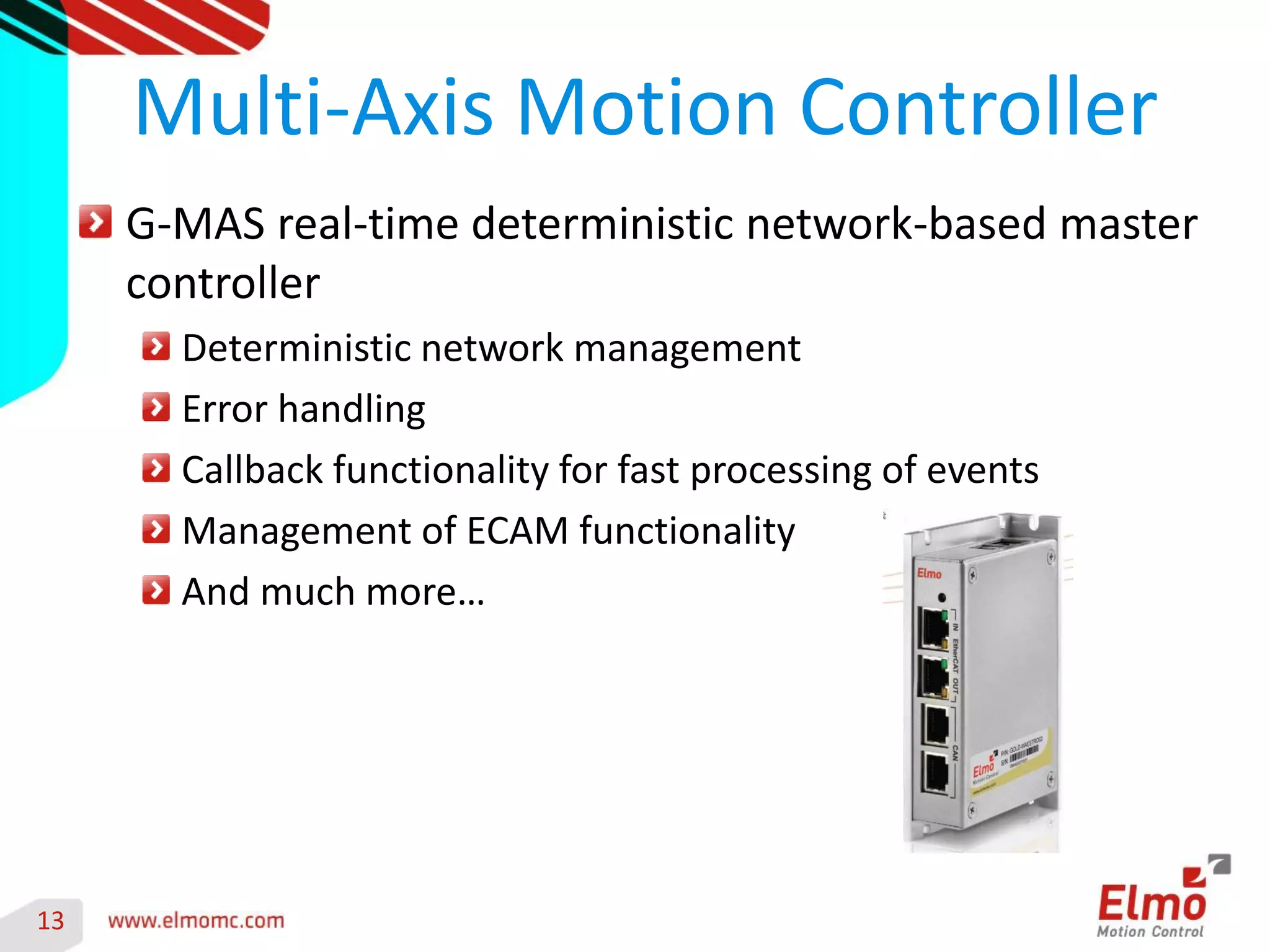
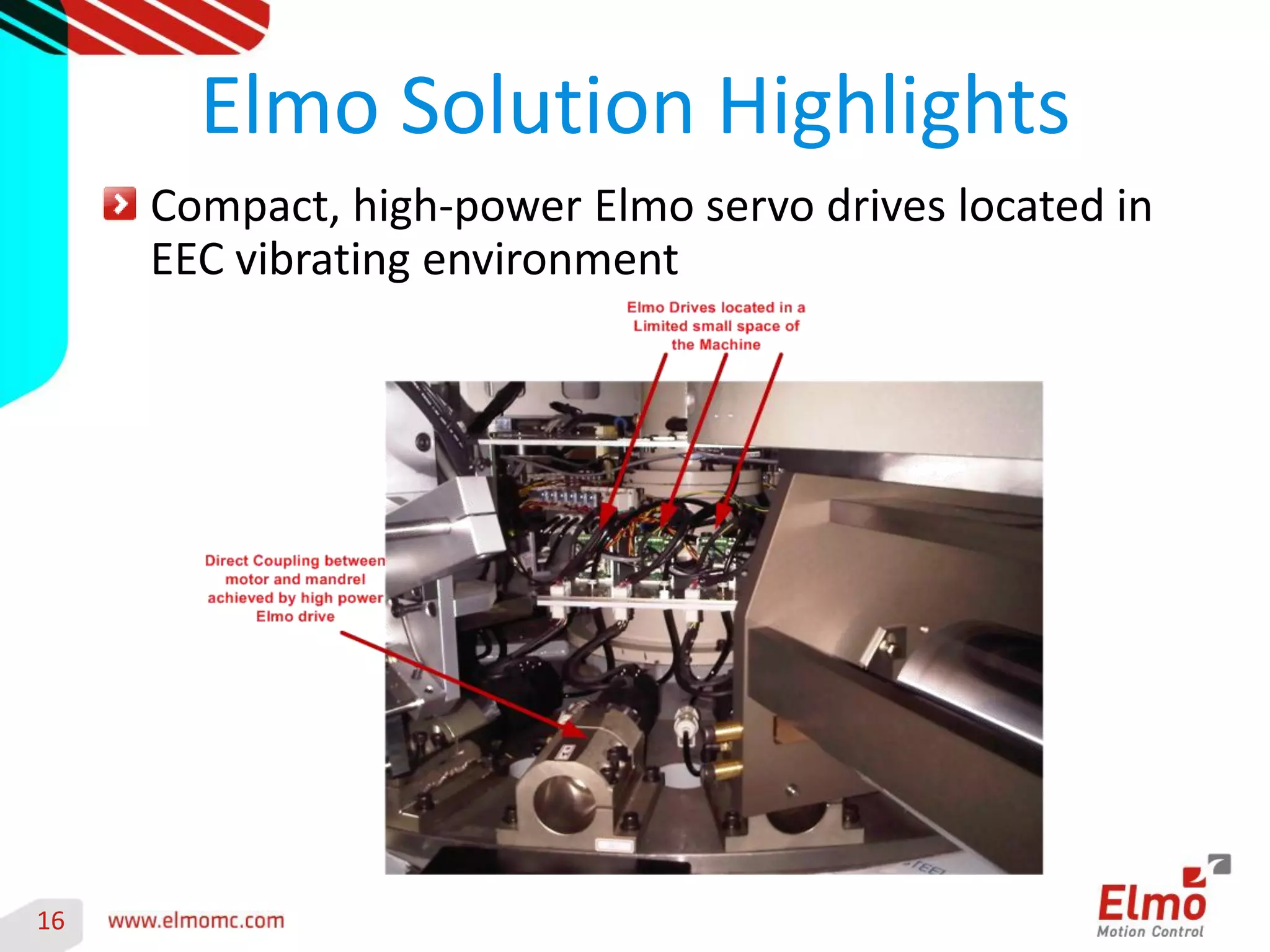
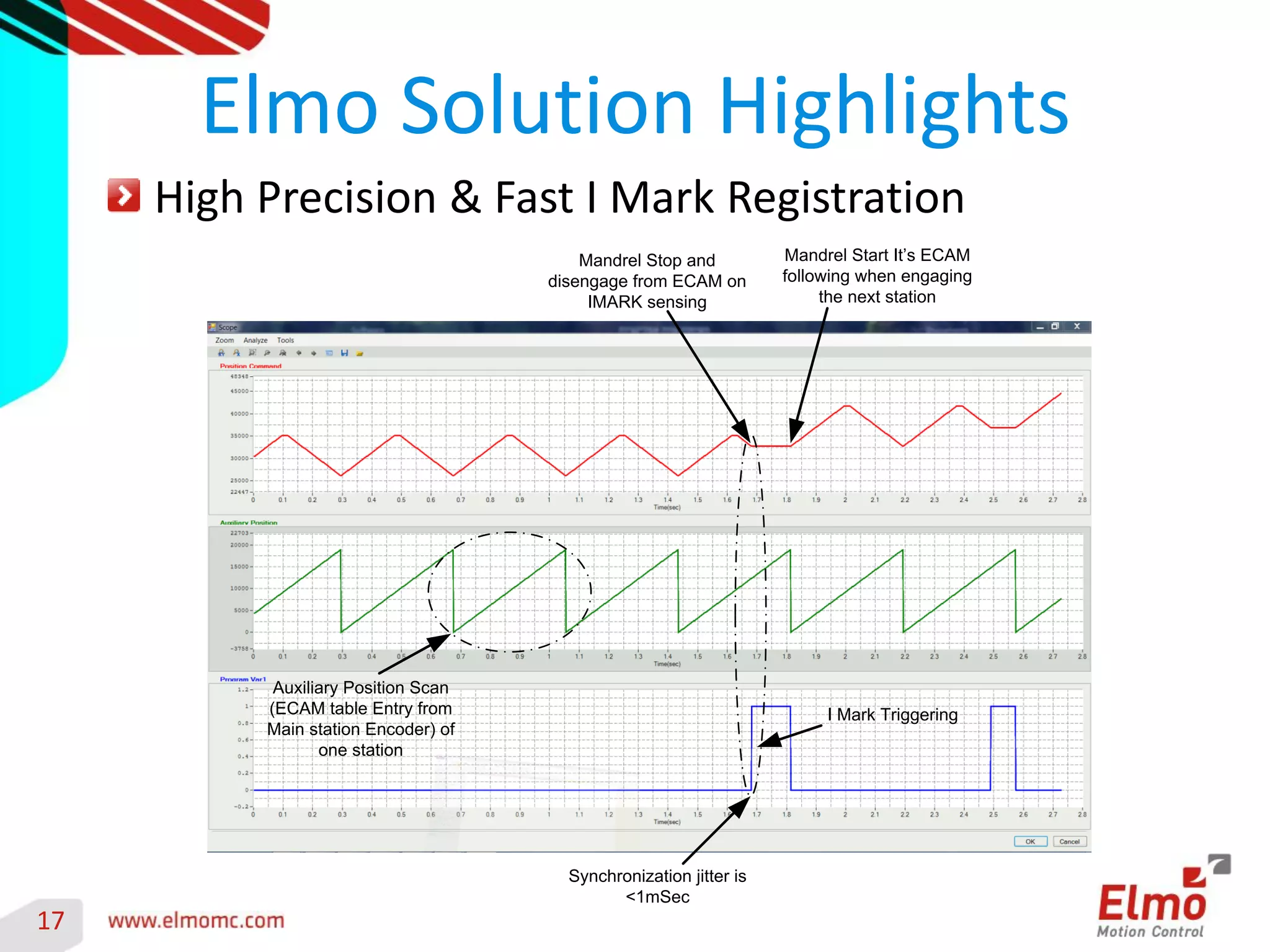
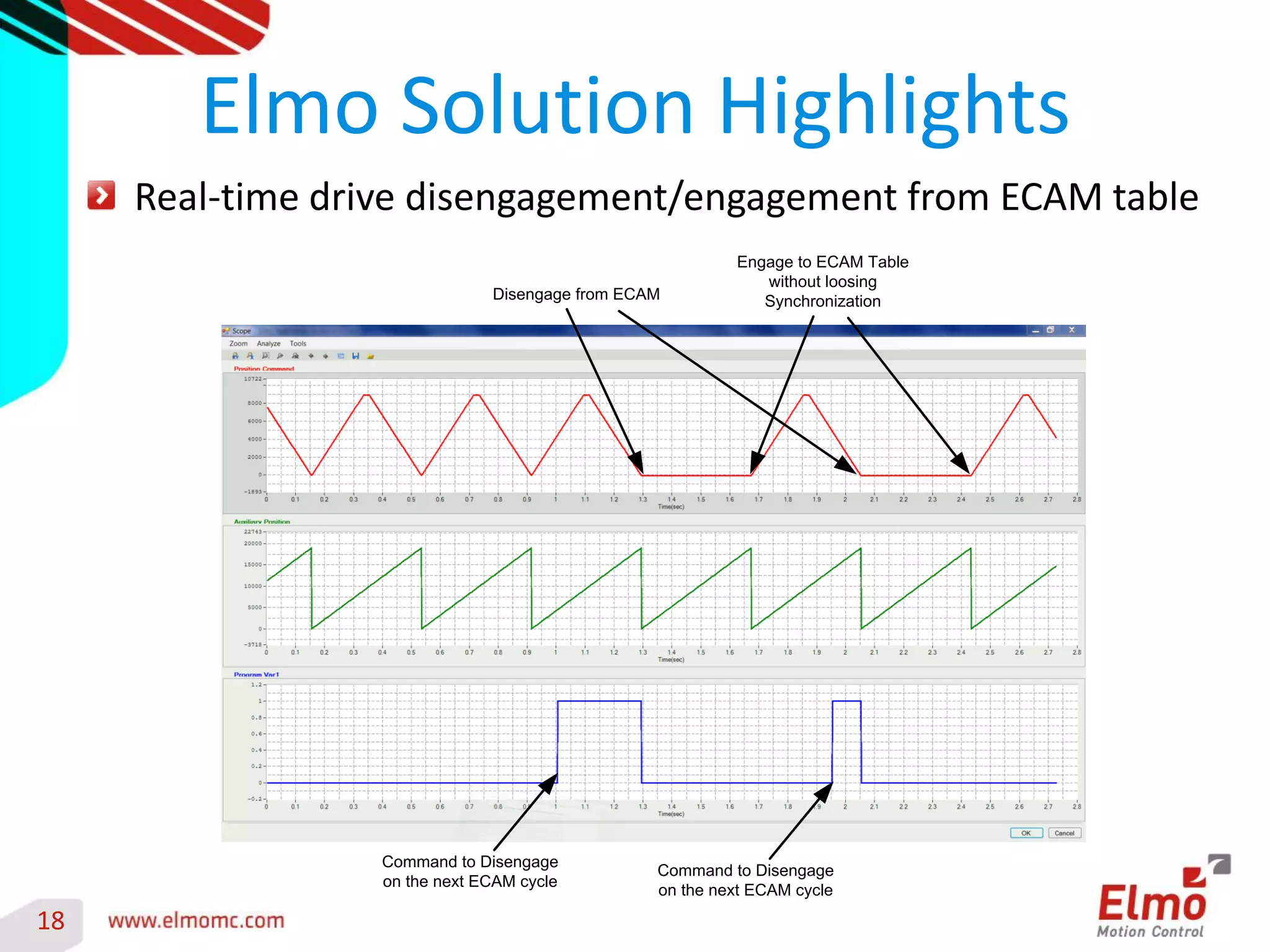


The document discusses an ecam-based motion control solution designed for various types of printing and textile machines, highlighting its application across multiple printing technologies and textile operations. It outlines the machine's architecture, which includes a rotating platform with servo-driven mandrels, and details the challenges and features of the Elmo network-based solution for high-performance synchronization and control. Additionally, it emphasizes the advanced motion control capabilities and benefits such as high throughput and precision in the operational environment of the machines.
































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)


![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)












