12/11/2025 1
Shri ShamraoPatil Yadravkar Educational & Charitable Trust’s
Sharad Institute of Technology College of
Engineering
An Autonomous Institute
An ‘A’ Grade Institute Accredited By NAAC,
NBA Accredited Programmes, ISO 9001: 2015 Accredited
institute.
Recognized u/s 2(f) & 12(B) Of The UGC Act, 1956
Servo motors
Stepper motors
2.
Types of servomotors
Servo motors can broadly be divided into two categories based on their motion.
Linear servo motors
Rotary servo motors.
These can be subdivided
According to current type (DC or AC)
Commutation type (brushed or brushless)
Control type (stepper or induction).
Analog Servo Motors
Digital Servo Motors
3.
Linear Servo Motors
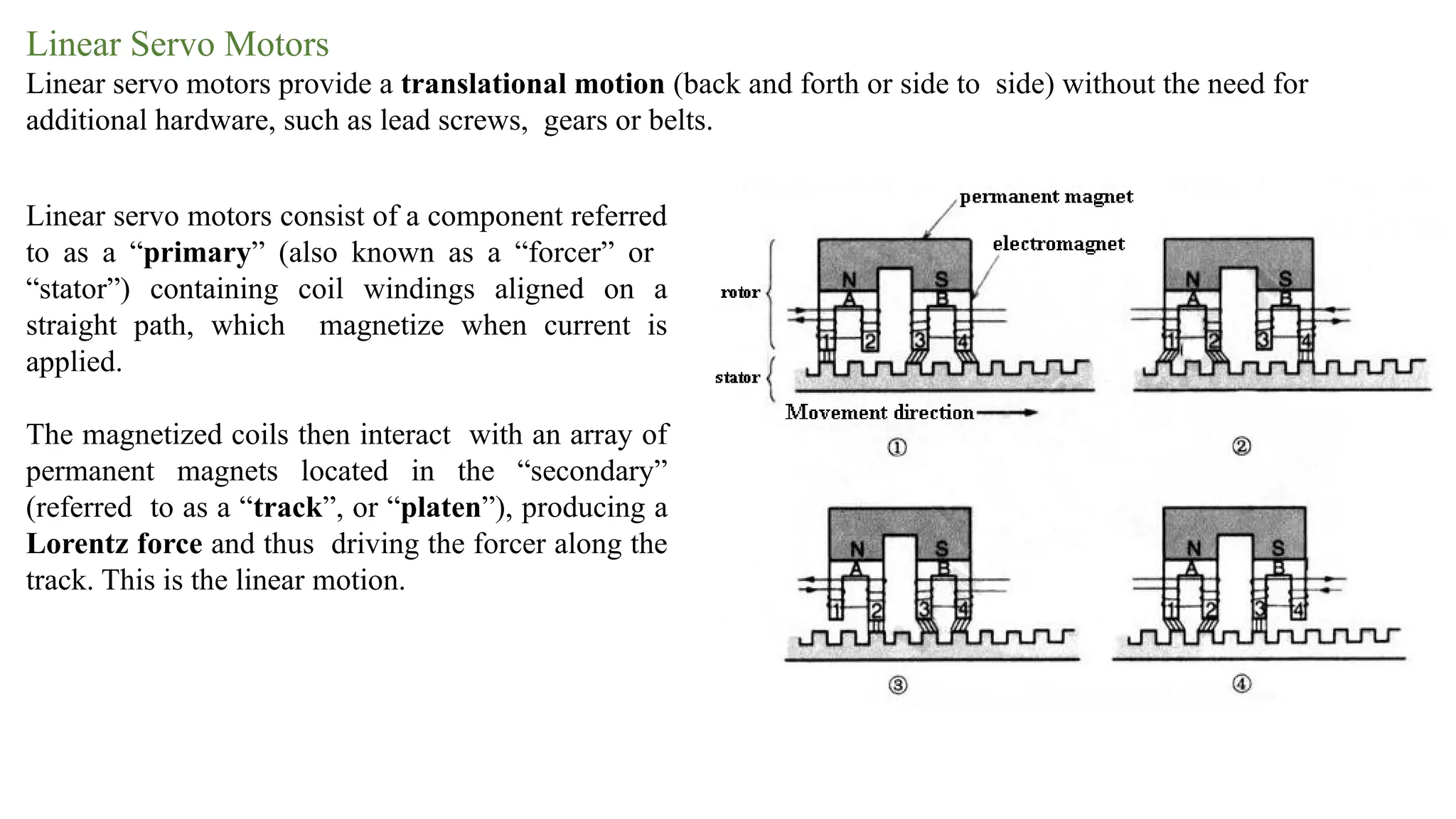
Linearservo motors provide a translational motion (back and forth or side to side) without the need for
additional hardware, such as lead screws, gears or belts.
Linear servo motors consist of a component referred
to as a “primary” (also known as a “forcer” or
“stator”) containing coil windings aligned on a
straight path, which magnetize when current is
applied.
The magnetized coils then interact with an array of
permanent magnets located in the “secondary”
(referred to as a “track”, or “platen”), producing a
Lorentz force and thus driving the forcer along the
track. This is the linear motion.
4.
Characteristics:
Linear servo motorsare highly precise, capable of positional accuracy down to sub-micron levels.
They are capable of rapid response in terms of acceleration and deceleration, making them ideal for dynamic
applications.
They are highly efficient with minimal energy losses.
Applications:
Pick and place systems, coordinate measuring machines (CMM), optical systems, laboratory automation.
5.
Advantages of linearservo motor
Linear servo motors are capable of direct linear motion, require no additional hardware. This makes them
lightweight, and requiring minimal maintenance.
Smooth and silent, thanks to the lack of contact between moving parts. This also means that there is no backlash,
as you would find in a lead screw-based setup.
High-speed response: (Fast speed, short acceleration and deceleration process)
The dynamic response time of mechanical transmission parts is several orders of magnitude larger than that of
electrical components. Because some mechanical transmission parts such as lead screws with large response time
constants are eliminated in the system, the dynamic response performance of the entire closed-loop control system
is greatly improved, and the response is extremely sensitive and fast.
High precision and accuracy:
Since the mechanical transmission mechanism such as the lead screw is eliminated, the tracking error caused by
the lag of the transmission system during interpolation is reduced. Through the linear position detection feedback
control, the positioning accuracy of the machine tool can be greatly improved.
High transmission rigidity and stable thrust.
High degree of scalability, meaning they can be designed to provide motion over long and short distances.
6.
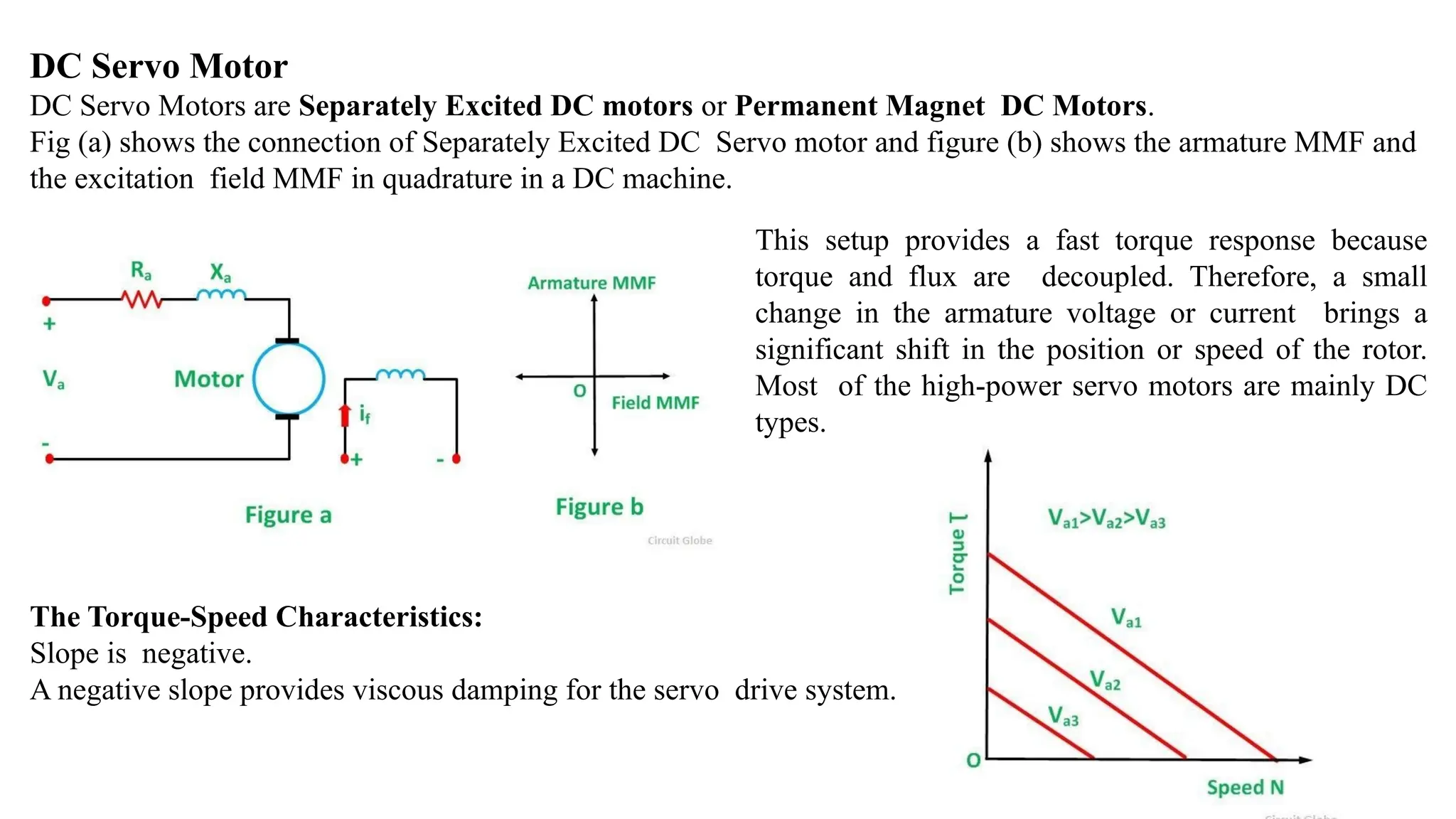
DC Servo Motor
DCServo Motors are Separately Excited DC motors or Permanent Magnet DC Motors.
Fig (a) shows the connection of Separately Excited DC Servo motor and figure (b) shows the armature MMF and
the excitation field MMF in quadrature in a DC machine.
This setup provides a fast torque response because
torque and flux are decoupled. Therefore, a small
change in the armature voltage or current brings a
significant shift in the position or speed of the rotor.
Most of the high-power servo motors are mainly DC
types.
The Torque-Speed Characteristics:
Slope is negative.
A negative slope provides viscous damping for the servo drive system.
7.
AC Servo Motor
TheAC Servo Motors are divided into two types: 2 Phase and 3 Phase AC servomotor.
Most of the AC servomotors are of the two-phase squirrel cage induction motor type.
They are used for low-power applications.
The three-phase squirrel cage induction motor is now utilized for applications where a high power system is
required.
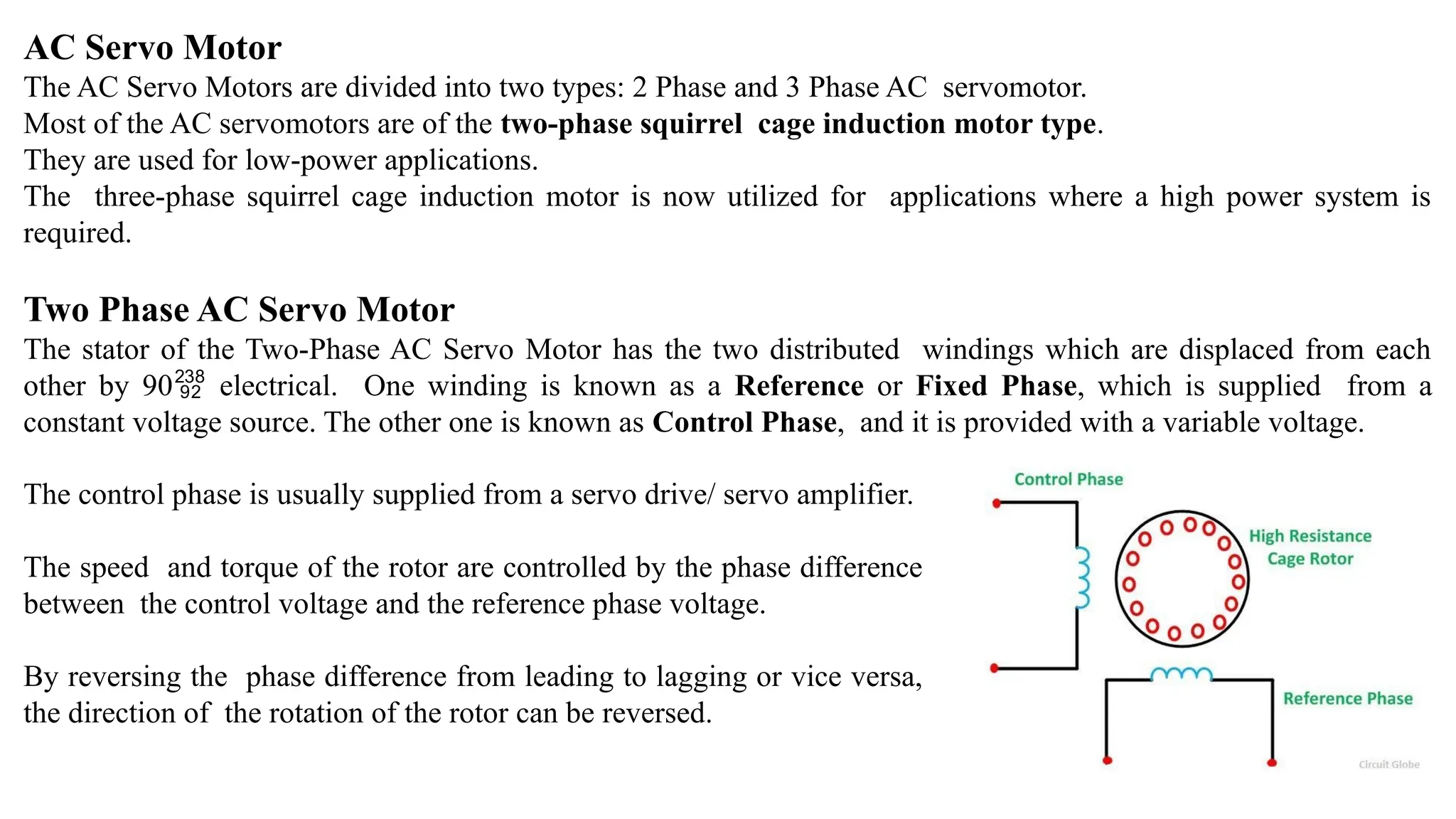
Two Phase AC Servo Motor
The stator of the Two-Phase AC Servo Motor has the two distributed windings which are displaced from each
other by 90 electrical. One winding is known as a Reference or Fixed Phase, which is supplied from a
constant voltage source. The other one is known as Control Phase, and it is provided with a variable voltage.
The control phase is usually supplied from a servo drive/ servo amplifier.
The speed and torque of the rotor are controlled by the phase difference
between the control voltage and the reference phase voltage.
By reversing the phase difference from leading to lagging or vice versa,
the direction of the rotation of the rotor can be reversed.
8.
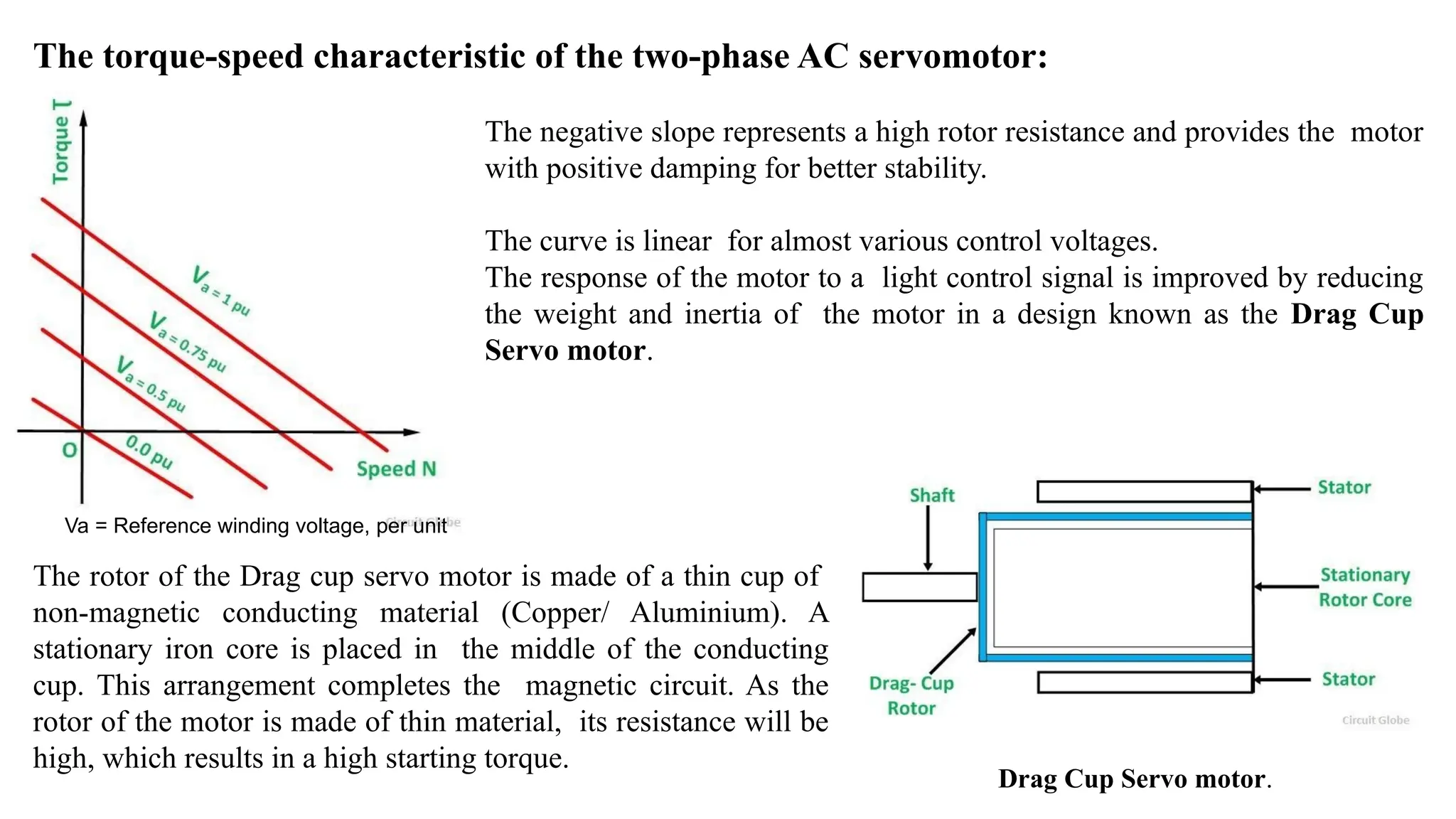
The torque-speed characteristicof the two-phase AC servomotor:
The negative slope represents a high rotor resistance and provides the motor
with positive damping for better stability.
The curve is linear for almost various control voltages.
The response of the motor to a light control signal is improved by reducing
the weight and inertia of the motor in a design known as the Drag Cup
Servo motor.
The rotor of the Drag cup servo motor is made of a thin cup of
non-magnetic conducting material (Copper/ Aluminium). A
stationary iron core is placed in the middle of the conducting
cup. This arrangement completes the magnetic circuit. As the
rotor of the motor is made of thin material, its resistance will be
high, which results in a high starting torque.
Drag Cup Servo motor.
Va = Reference winding voltage, per unit
9.
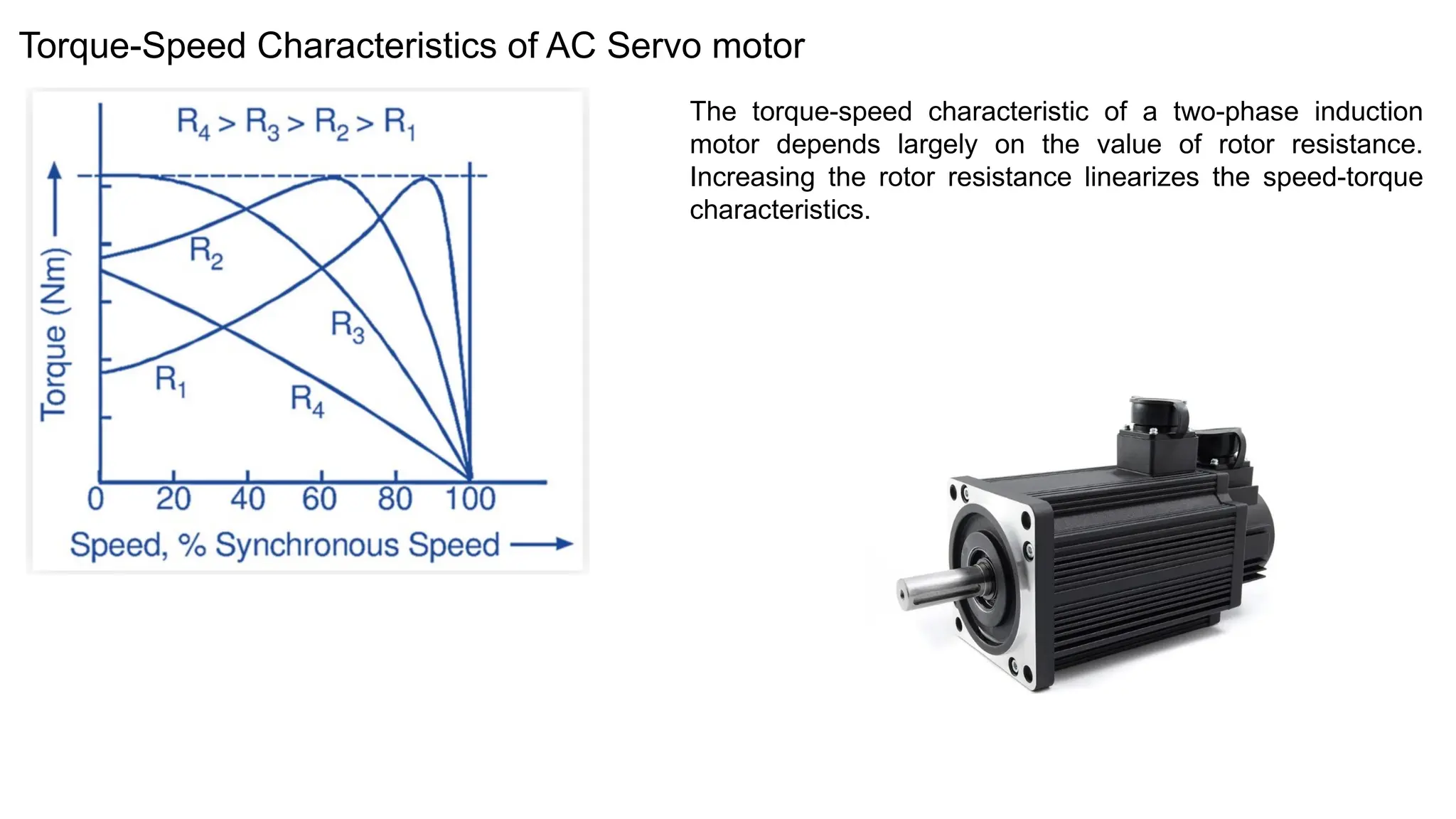
The torque-speed characteristicof a two-phase induction
motor depends largely on the value of rotor resistance.
Increasing the rotor resistance linearizes the speed-torque
characteristics.
Torque-Speed Characteristics of AC Servo motor
10.
Three Phase ACServo motors
Three-phase induction motors with voltage control are used as servo motors for applications in the high power
servo systems.
A three-phase squirrel cage induction motor is a highly nonlinear coupled circuit device.
It is used as a linear decoupled machine by using a control method known as a Vector Control or Field
Oriented Control.
The current in this type of machine is controlled in such a way that the torque and flux are decoupled.
Vector control, or field-oriented control (FOC), allows for the independent control of torque and flux in a three-
phase AC servo motor by mathematically separating the stator current into two orthogonal components.
AC currents and voltages are converted into a rotating reference frame where they can be controlled like the
independent flux and torque currents of a DC motor.
This results in high-accuracy speed and torque control, fast dynamic response, and smooth operation, making AC
servo motors capable of high-performance applications.
11.
Use of ServoMotors
Position Control: Servo motors excel in applications where precise position control is necessary, such as in
positioning systems, antenna alignment, and tracking systems.
Speed Control: They are also used in applications requiring precise speed control, including conveyor systems,
automated guided vehicles (AGVs), and fans.
Torque Control: In applications like robotic grippers or clamping devices, servo motors provide controlled
torque to handle delicate or variable loads.
12.
Applications of ServoMotors
Servo motors. are used in a wide range of applications due to their precision, reliability, and versatility.
Robotics: Servo motors are extensively used in robotics for precise control of robotic arms, joints, and end effectors. They
enable robots to perform complex tasks with high accuracy.
CNC Machinery: In CNC (Computer Numerical Control) machines, servo motors are used to control the movement of the
tool or workpiece with precision, allowing for intricate and accurate machining operations.
Automated Manufacturing: Servo motors are employed in automated manufacturing systems to control conveyors,
assembly lines, and packaging machines, ensuring precise and efficient production processes.
Aerospace: In aerospace applications, servo motors are used in flight control systems, landing gear mechanisms, and other
critical components that require precise control and reliability.
Medical Equipment: Servo motors are used in medical devices such as MRI machines, surgical robots, and infusion
pumps, where precise and controlled movements are essential.
Consumer Electronics: In consumer electronics, servo motors are used in devices like cameras for autofocus and zoom
functions, as well as in CD/DVD players for disc positioning.
Remote-Controlled Vehicles: Servo motors are a key component in remote-controlled cars, planes, and boats, providing
precise control of steering, throttle, and other functions.
Radar systems and process controllers.
computers.
Tracking and guidance systems













































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)





