Where Should WePlace LiDARs on the Autonomous Vehicle?
- an Optimal Design Approach
Zuxin Liu, Mansur Arief, and Ding Zhao (北京航空航天大学, CMU)
- 回転式のLiDARの配置・個数・ビームの本数などについて,安全性を保ちつつコストを抑えるための
最適な構成を求める手法を提案,有効性を示した.
- LiDARのビームによって分割される領域の内接球を検知不可領域とし,最大の内接球の最小化問題に落
とし込む.が,計算が重いので,空間を直方体に分割し,各領域の体積 V と表面積 SA の比 V/SA (Volume
to Surface Area Ratio, VSR)を最小化することで計算を可能にしている.
- Artificial Bee Colony アルゴリズムを利用して最適化問題を解いている.
- 16本のビームのLiDARが1~4つあるときの最適な配置が Fig.5 に示されている.
- Fig.6 には,LiDARのビームの本数と個数によって VSRがどのように変化するかが示されている.
まとめた人:Daiki Mori
Kinematic Analysis ofa 4-DOF Parallel Mechanism with Large Translational and
Orientational Workspace
Shoichiro Kamada, Thierry Laliberte ́ and Cle ́ment Gosselin
- 新しい4自由度パラレルリンクメカニズムの提案
- 4つの同方向のスライダーを用いて並行 3自由度と回転1自由度を有したメカニズムを作ることができたとこ
ろが新しい
- 同方向の直進スライダーを 4つ用いた。Kinematicモデルを導出し、ヤコビアンを用いて、特異点と作業可
能領域を求めることができた
- デザインを3DCADで表現し、プロトタイプの製作をした。シミュレーションで提案したメカニズムの有効性を
示すことができ、プロトタイプの製作により、実機でも実現が可能であることを示した
まとめた人:Miura
7.
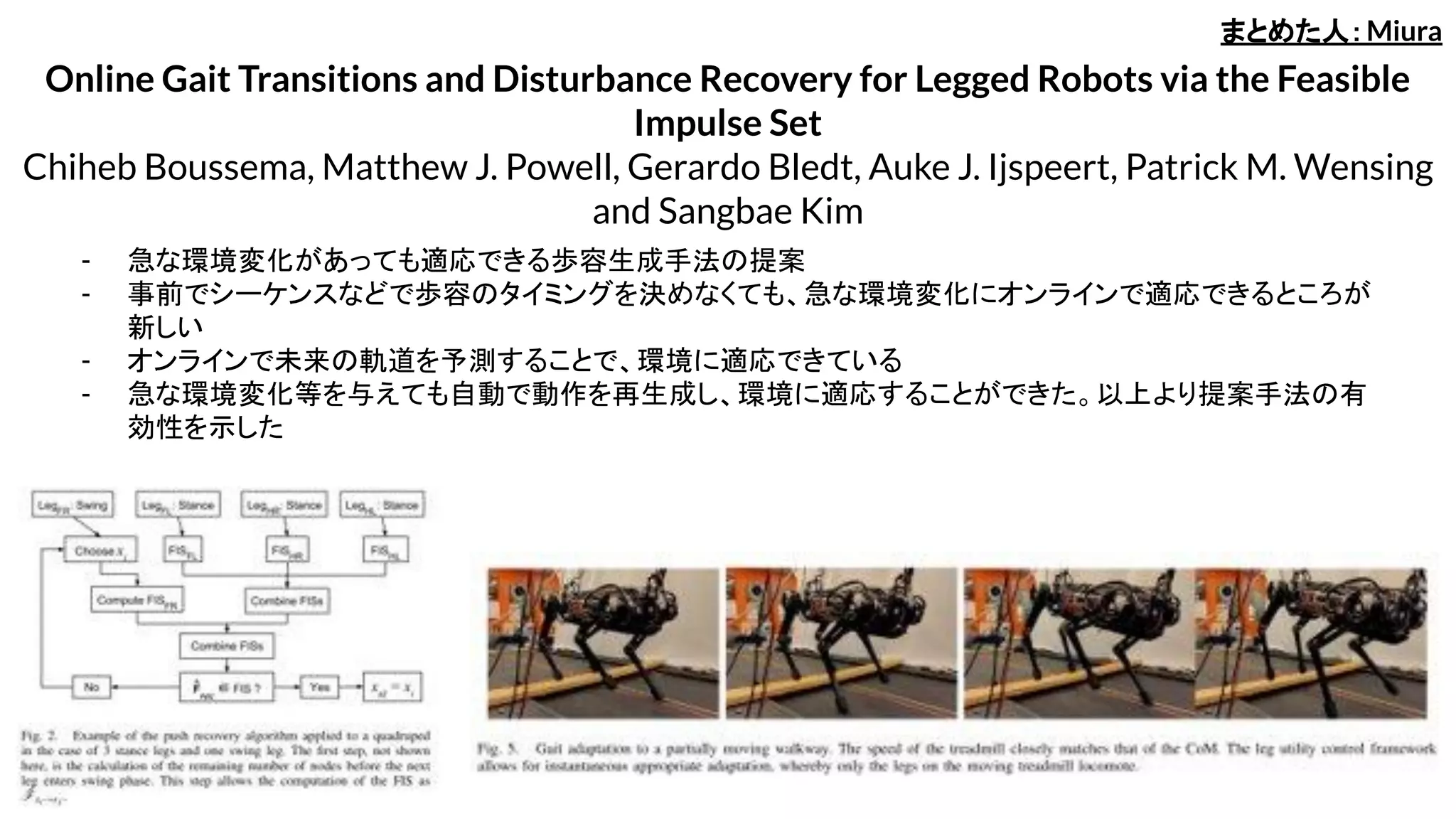
Online Gait Transitionsand Disturbance Recovery for Legged Robots via the Feasible
Impulse Set
Chiheb Boussema, Matthew J. Powell, Gerardo Bledt, Auke J. Ijspeert, Patrick M. Wensing
and Sangbae Kim
- 急な環境変化があっても適応できる歩容生成手法の提案
- 事前でシーケンスなどで歩容のタイミングを決めなくても、急な環境変化にオンラインで適応できるところが
新しい
- オンラインで未来の軌道を予測することで、環境に適応できている
- 急な環境変化等を与えても自動で動作を再生成し、環境に適応することができた。以上より提案手法の有
効性を示した
まとめた人:Miura
8.
Vision-Based Control andStability Analysis of a Cable-Driven Parallel Robot
Zane Zake, Franc ̧ois Chaumette, Nicolo` Pedemonte, and Ste ́phane Caro
- モデルベース制御の安定性を向上させる手法の提案
- ビジョンベース制御によりモデルベース制御の不確か性を評価し、安定性向上を狙ったアイデア
- 不確かさをモデル化し、 Pose Based Visual Serving Controlにより目標の姿勢になっているか推定してい
る
- モデルベース制御の正確性を評価し、安定性を向上させることができた
まとめた人:Miura
9.
Walking and Runningwith Passive Compliance: Lessons from Engineering a Live
Demonstration of the ATRIAS Biped
Christian Hubicki, Andy Abate, Patrick Clary, Siavash Rezazadeh, Mikhail Jones, Andrew
Peekema, Johnathan Van Why, Ryan Domres, Albert Wu, William Martin,Hartmut Geyer,
and Jonathan Hurst
- 様々な地形に対してロバストな受動歩行が可能な自立型ロボットの提案
- 地形や外力といった環境による外的要因が生じたとしても連続的な受動歩行が可能な制御システムの提
案
- プランニングやビジュアルフィードバックといった制御器を用意せず、外的なサポートを用いない制御則を
開発した
- 実験として、アスファルト、芝、人工芝といった表面の異なる環境や、 15cmほどの段差を踏破することがで
きた
まとめた人:Miura
10.
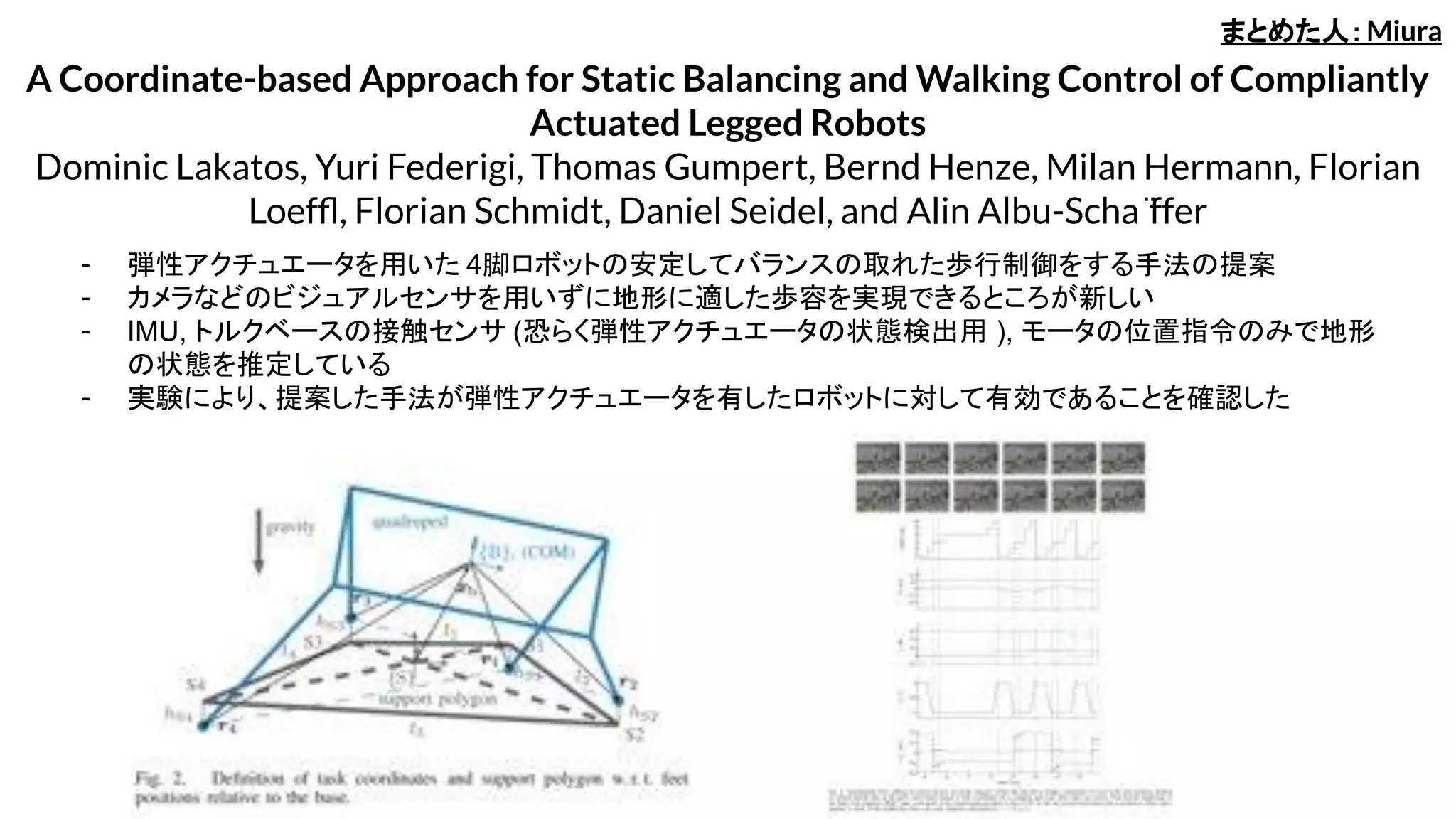
A Coordinate-based Approachfor Static Balancing and Walking Control of Compliantly
Actuated Legged Robots
Dominic Lakatos, Yuri Federigi, Thomas Gumpert, Bernd Henze, Milan Hermann, Florian
Loeffl, Florian Schmidt, Daniel Seidel, and Alin Albu-Scha ̈ffer
- 弾性アクチュエータを用いた 4脚ロボットの安定してバランスの取れた歩行制御をする手法の提案
- カメラなどのビジュアルセンサを用いずに地形に適した歩容を実現できるところが新しい
- IMU, トルクベースの接触センサ (恐らく弾性アクチュエータの状態検出用 ), モータの位置指令のみで地形
の状態を推定している
- 実験により、提案した手法が弾性アクチュエータを有したロボットに対して有効であることを確認した
まとめた人:Miura
11.
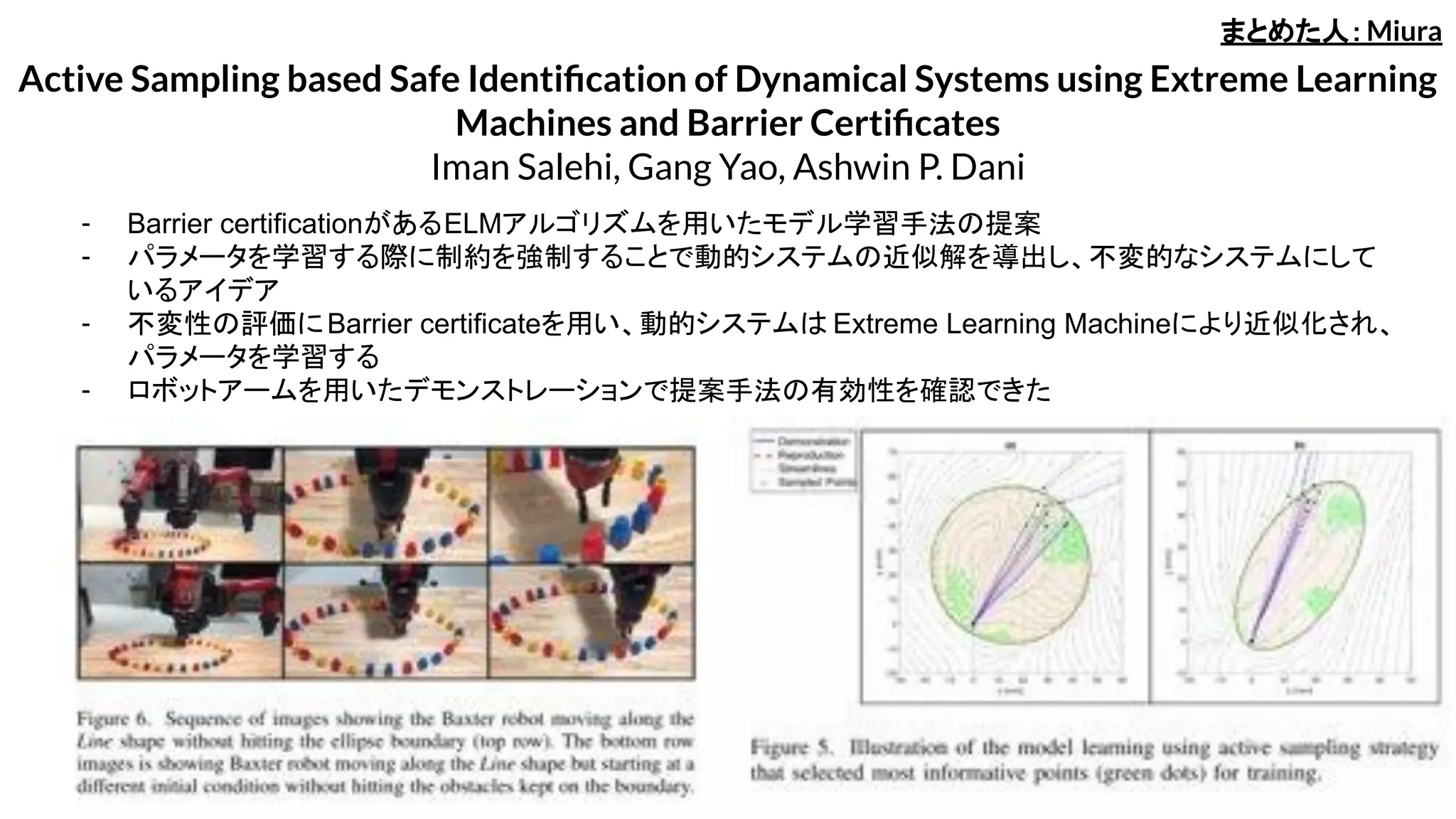
Active Sampling basedSafe Identification of Dynamical Systems using Extreme Learning
Machines and Barrier Certificates
Iman Salehi, Gang Yao, Ashwin P. Dani
- Barrier certificationがあるELMアルゴリズムを用いたモデル学習手法の提案
- パラメータを学習する際に制約を強制することで動的システムの近似解を導出し、不変的なシステムにして
いるアイデア
- 不変性の評価にBarrier certificateを用い、動的システムは Extreme Learning Machineにより近似化され、
パラメータを学習する
- ロボットアームを用いたデモンストレーションで提案手法の有効性を確認できた
まとめた人:Miura
12.
ALMA - ArticulatedLocomotion and Manipulation for a Torque-Controllable Robot
C. Dario Bellicoso, Koen Kra ̈mer, Markus Sta ̈uble, Dhionis Sako, Fabian Jenelten, Marko
Bjelonic, Marco Hutter
- 6自由度のマニピュレータを有する 4脚ロボットの制御に関する研究
- トルク制御のためのオンラインモーションプランニングの手法が新しい
- ZMPベースのオンラインモーションプランニングを用いてボディ全体をトルク制御するコントローラを設計
し、ウォーク、トロット、ペースの歩行を実現している
- トルクコントロールをすることで複雑な動きを実装することができ、ユーザとロボットが安全に触れ合うこと
ができるシステムを作れた
まとめた人:Miura
13.
Balance Map Analysisas a Measure of Walking Balance Based on Pendulum-like Leg
Movements
Takahiro Kagawa
- 歩行時のバランスを分析する手法の提案
- 歩行時の軌道エネルギー保存を考慮して望ましい設置条件での到達可能性を分析する手法が新しい
- エネルギーの割合と位相変化の 2つのパラメータのみでスイングとスタンスの軌道の関係を特徴付ける。ま
た、スイングしている脚と反対の脚の関係性を表現できる
- 未来のバランスマップを予測し、非線型モデルでも早い段階でバランスの崩れるポイントがわかることを示
せた
まとめた人:Miura
14.
Design of Anti-skidFoot with Passive Slip Detection Mechanism for Conditional
Utilization of Heterogeneous Foot Pads
Jaejun Park, Do Hun Kong and Hae-Won Park
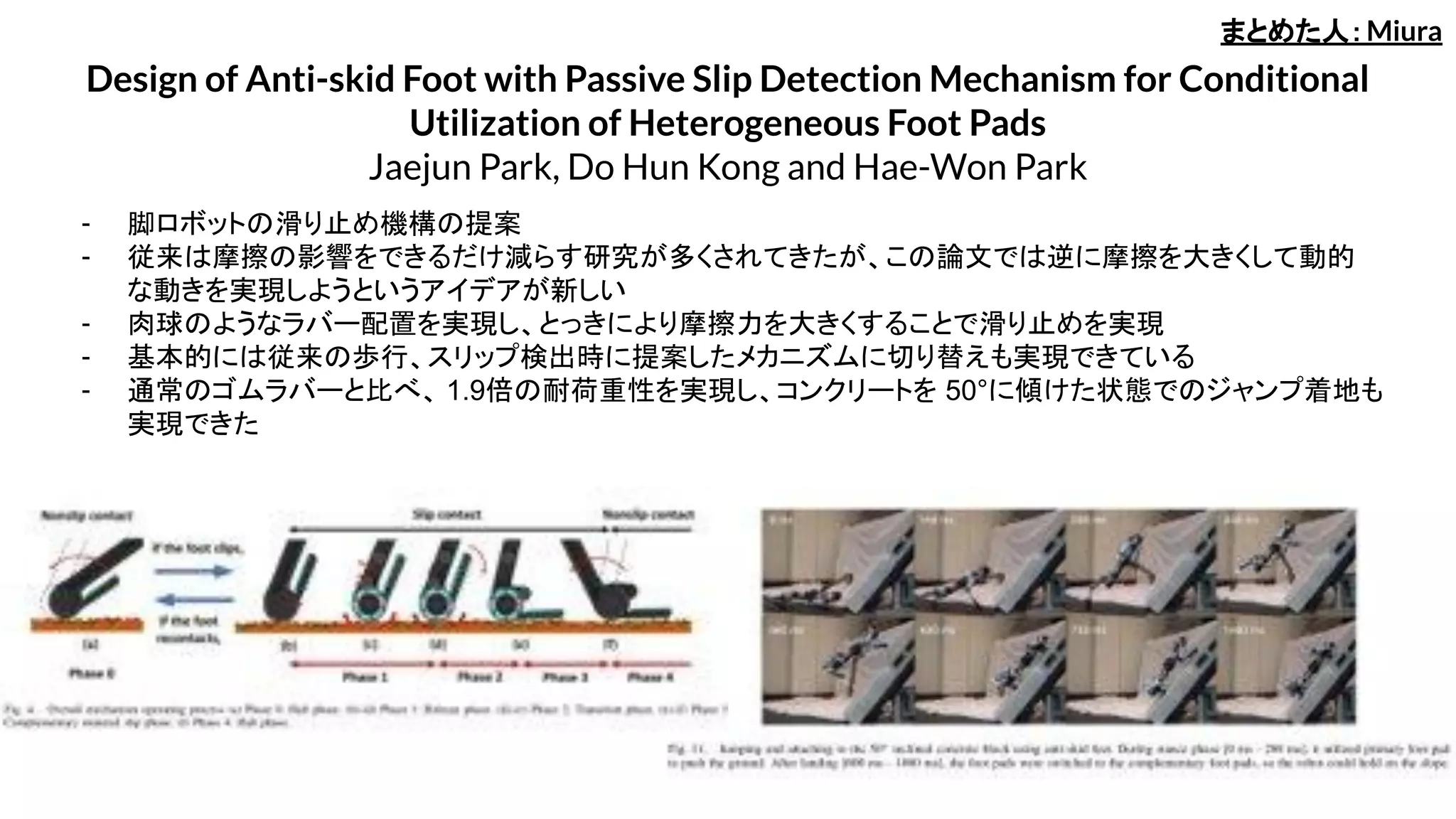
- 脚ロボットの滑り止め機構の提案
- 従来は摩擦の影響をできるだけ減らす研究が多くされてきたが、この論文では逆に摩擦を大きくして動的
な動きを実現しようというアイデアが新しい
- 肉球のようなラバー配置を実現し、とっきにより摩擦力を大きくすることで滑り止めを実現
- 基本的には従来の歩行、スリップ検出時に提案したメカニズムに切り替えも実現できている
- 通常のゴムラバーと比べ、 1.9倍の耐荷重性を実現し、コンクリートを 50°に傾けた状態でのジャンプ着地も
実現できた
まとめた人:Miura
15.
Energy Efficient Navigationfor Running Legged Robots
Mario Y. Harper , John V. Nicholson , Emmanuel G. Collins, Jr. , Jason Pusey and Jonathan E.
Clark
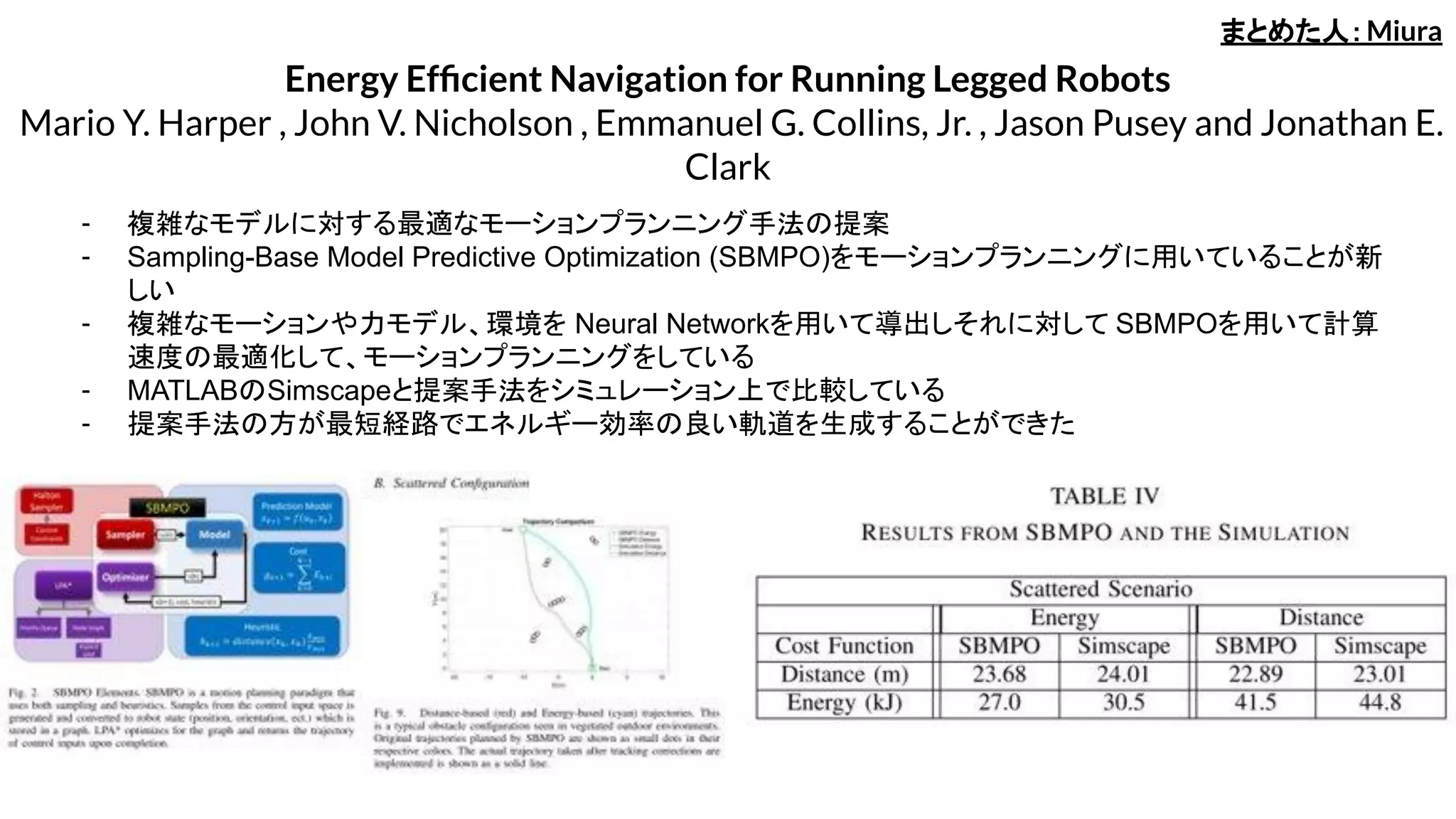
- 複雑なモデルに対する最適なモーションプランニング手法の提案
- Sampling-Base Model Predictive Optimization (SBMPO)をモーションプランニングに用いていることが新
しい
- 複雑なモーションや力モデル、環境を Neural Networkを用いて導出しそれに対して SBMPOを用いて計算
速度の最適化して、モーションプランニングをしている
- MATLABのSimscapeと提案手法をシミュレーション上で比較している
- 提案手法の方が最短経路でエネルギー効率の良い軌道を生成することができた
まとめた人:Miura
16.
Experimental Demonstration ofHigh-Performance Robotic Balancing
Josephus J. M. Driessen Antonios E. Gkikakis Roy Featherstone B. Roodra P. Singh
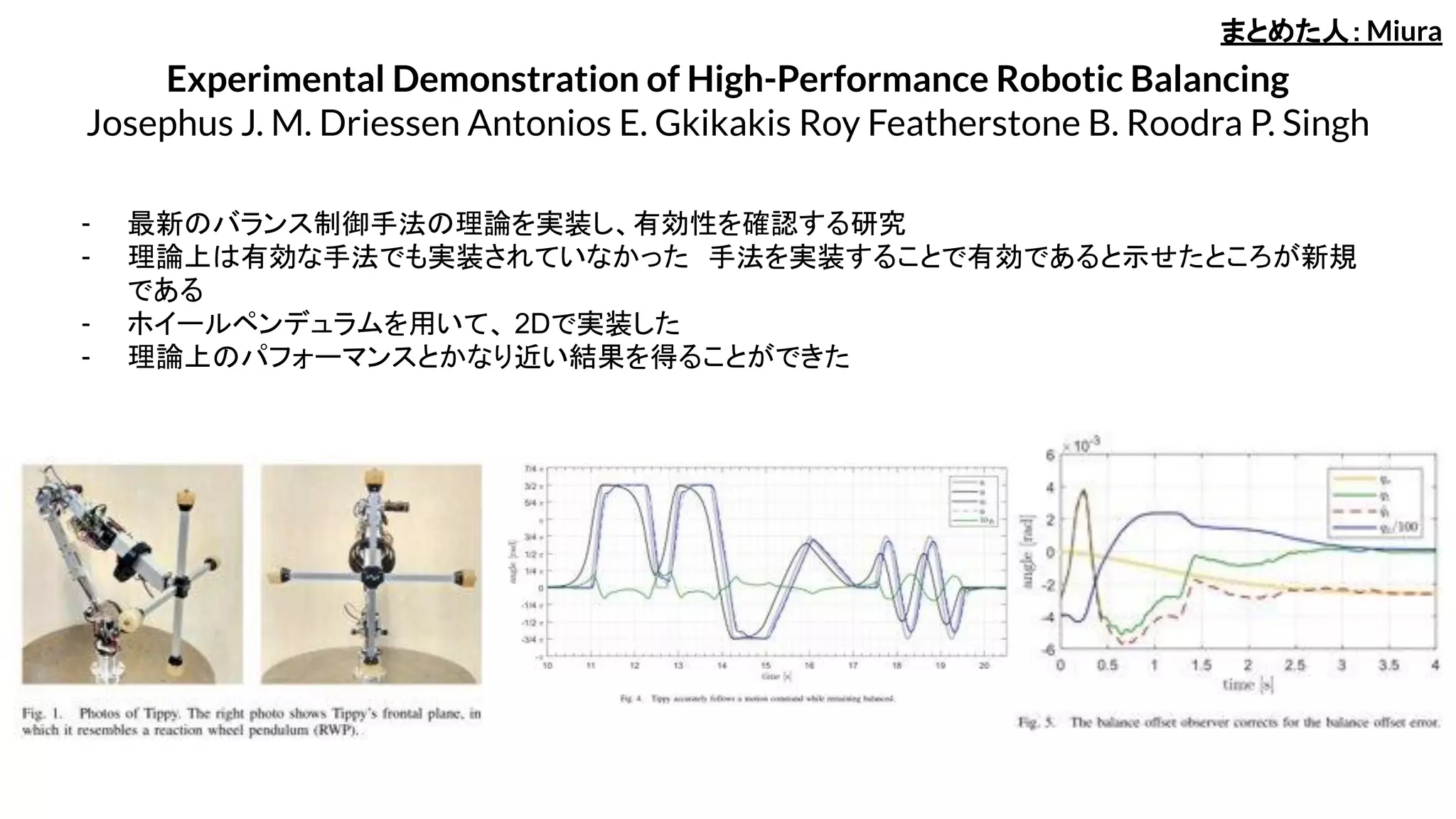
- 最新のバランス制御手法の理論を実装し、有効性を確認する研究
- 理論上は有効な手法でも実装されていなかった 手法を実装することで有効であると示せたところが新規
である
- ホイールペンデュラムを用いて、 2Dで実装した
- 理論上のパフォーマンスとかなり近い結果を得ることができた
まとめた人:Miura
17.
Generation of StealthWalking Gait on Low-friction Road Surface
Fumihiko Asano
- 低摩擦路面でのステルス歩容を生成する研究
- Angular momentum constraint control (AMCC)を用いて低摩擦路面での安定した保養を実現したアイデ
アが新しい
- 劣駆動リムレスホイールロボットの非線形モデルを用いている
- 滑り抵抗に着目し、Double-limb support phase (DSP)のときの上半身制御の最適化について述べている
- 摩擦の少ない環境でも歩容を実現できた
まとめた人:Miura
18.
Accurate Direct Visual-LaserOdometry with Explicit Occlusion Handling and Plane
Detection
Kaihong Huang, Junhao Xiao, and Cyrill Stachniss
- レーザースキャナー (LiDAR) と単眼カメラを利用して正確な自己運動推定を行うための, Photometric
Alignmentに基づくダイレクトアプローチ (Direct Laser-Visual Odometry) の提案
- 距離計測のまばらさに対処するため,スキャンデータから同じ平面上にある点群のセットを作り,画像デー
タから対応するピクセル領域を抽出.それ以外の点群・ピクセル情報とともにフレーム間の運動推定に利
用
- 同様の理由から,オクルージョンを予測 (Fig. 2)
- 推定精度向上のため,測光情報と幾何学的 (測距) 情報を利用した2段階レジストレーションを採用
- KITTIデータセットと自作のデータセットにより提案アプローチの有効性を確認 (Fig. 4,TABLE II)
まとめた人:Nemoto
Fig. 2: Example result of the occlusion detection algorithm. Fig. 4: Outdoor experiment.
TABLE II: Comparison on relative translational
error using the KITTI odometry dataset.
19.
Fast and RobustInitialization for Visual-Inertial SLAM
Carlos Campos, José M. M. Montiel, and Juan D. Tardós
- Visual-Inertial SLAMにおける初期化の速度とロバスト性を向上させるための, Martinelli-Kaiserの解法を
修正した初期化方法の提案
- 部分的な追跡結果の利用とカメラ・ IMUの相対姿勢の考慮のために Martinelli-Kaiserの解法を一般化し,
処理時間短縮のため,使用する特徴とキーフレームの数を固定し,初期校正パラメータを取得
- Visual-Inertial Bundle Adjustment (BA) を行い (Fig. 2),精度確認のため,Observability Testを実行
- Consensus Testを行い,問題なければ,すべての特徴とキーフレームを利用して BAを再実行 (Fig. 5)
- EuRoCデータセットを利用し,提案手法により 2秒以内にスケール誤差 5 %程度で初期化できることを確認
(TABLE II).軌跡が十分長ければ, 10秒後には1 %以下まで低下
まとめた人:Nemoto
Fig. 2: Graph for the first visual-inertial BA.
Fig. 5: Initializations found along the EuRoC V101
trajectory, after the observability and consensus tests.
TABLE II: Results of exhaustive initialization
tests over the three V1 EuRoC sequences.
20.
MH-iSAM2: Multi-hypothesis iSAMusing Bayes Tree and Hypo-tree
Ming Hsiao and Michael Kaess
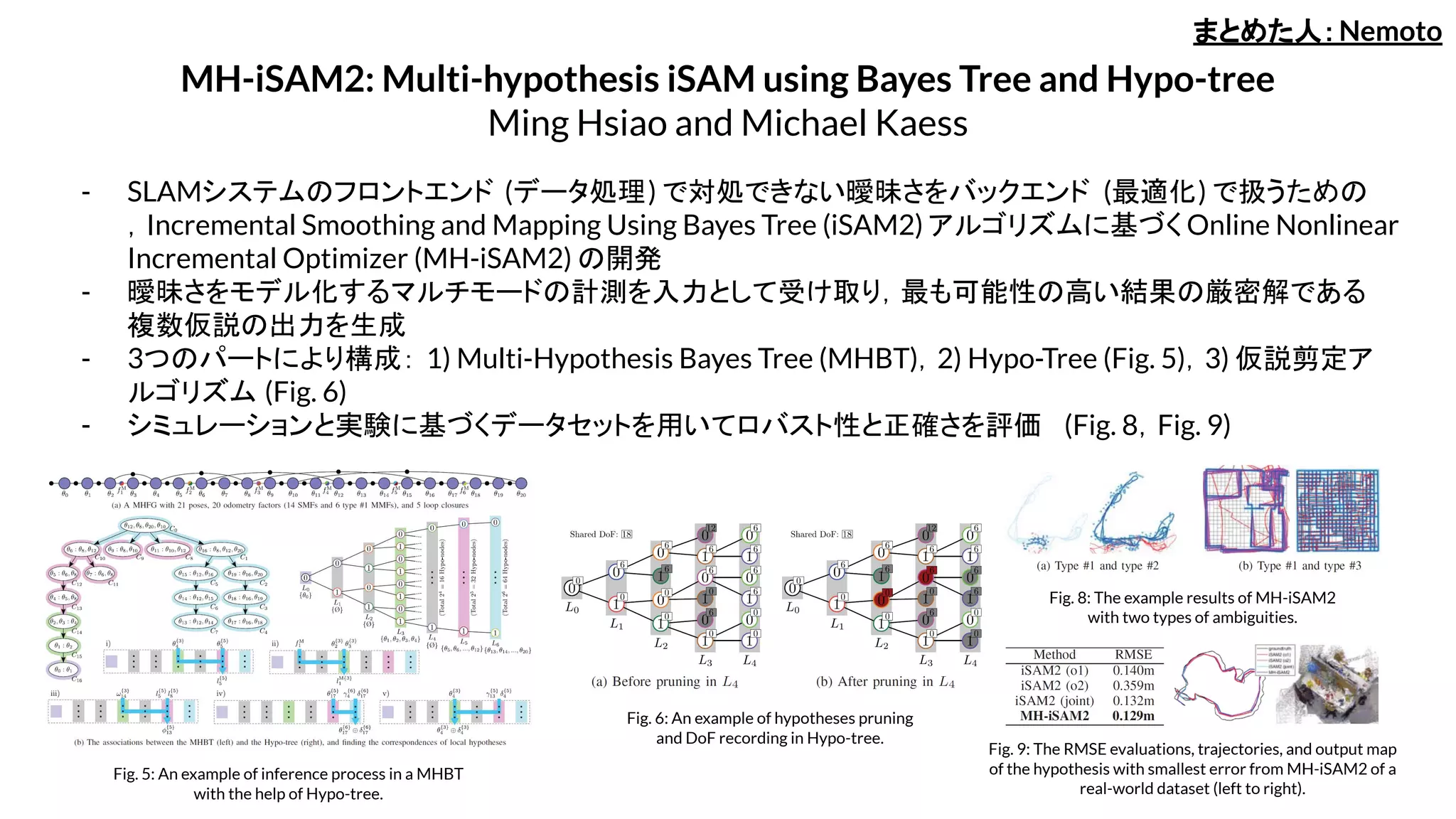
- SLAMシステムのフロントエンド (データ処理) で対処できない曖昧さをバックエンド (最適化) で扱うための
,Incremental Smoothing and Mapping Using Bayes Tree (iSAM2) アルゴリズムに基づく Online Nonlinear
Incremental Optimizer (MH-iSAM2) の開発
- 曖昧さをモデル化するマルチモードの計測を入力として受け取り,最も可能性の高い結果の厳密解である
複数仮説の出力を生成
- 3つのパートにより構成: 1) Multi-Hypothesis Bayes Tree (MHBT),2) Hypo-Tree (Fig. 5),3) 仮説剪定ア
ルゴリズム (Fig. 6)
- シミュレーションと実験に基づくデータセットを用いてロバスト性と正確さを評価 (Fig. 8,Fig. 9)
まとめた人:Nemoto
Fig. 5: An example of inference process in a MHBT
with the help of Hypo-tree.
Fig. 6: An example of hypotheses pruning
and DoF recording in Hypo-tree.
Fig. 8: The example results of MH-iSAM2
with two types of ambiguities.
Fig. 9: The RMSE evaluations, trajectories, and output map
of the hypothesis with smallest error from MH-iSAM2 of a
real-world dataset (left to right).
21.
Modeling and PlanningManipulation in Dynamic Environments
Philipp S. Schmitt, Florian Wirnshofer, Kai M. Wurm, Georg v. Wichert, and Wolfram
Burgard
- 作業の多様性,動的かつ不確かな環境,ロボットの運動と動作の順次的な相互依存の 3つを同時に考慮
するための,モデルとそれを用いた計画器の提案
- マニピュレーションを計画し,制御するためのモデルとして Dynamic Constraint-Graphを構築
- モデルからConstraint-Based Controllerを得て,それを使用した Kinodynamic Manipulation Plannerを構
築.これは,使用したコントローラの外乱に対するオンラインでの反応を可能とするシーケンスを算出する
(Fig. 3).
- 2台のマニピュレータによる作業の実験により提案の正当性を確認し (Fig. 4),シミュレーションによりプラン
ニングに費やす時間などを他のアプローチ (RMR*) と比較 (TABLE I)
- 現在の制約: 確率的完全性とコントローラシーケンスの引力範囲に関する形式化された保障の欠如
まとめた人:Nemoto
Fig. 3: Phase-portrait of a controller sequence for a pick and place task.
Fig. 4: While the robot is executing a plan, a person,
that is tracked via markers, enters the workspace.
TABLE I: Planning and execution times.
22.
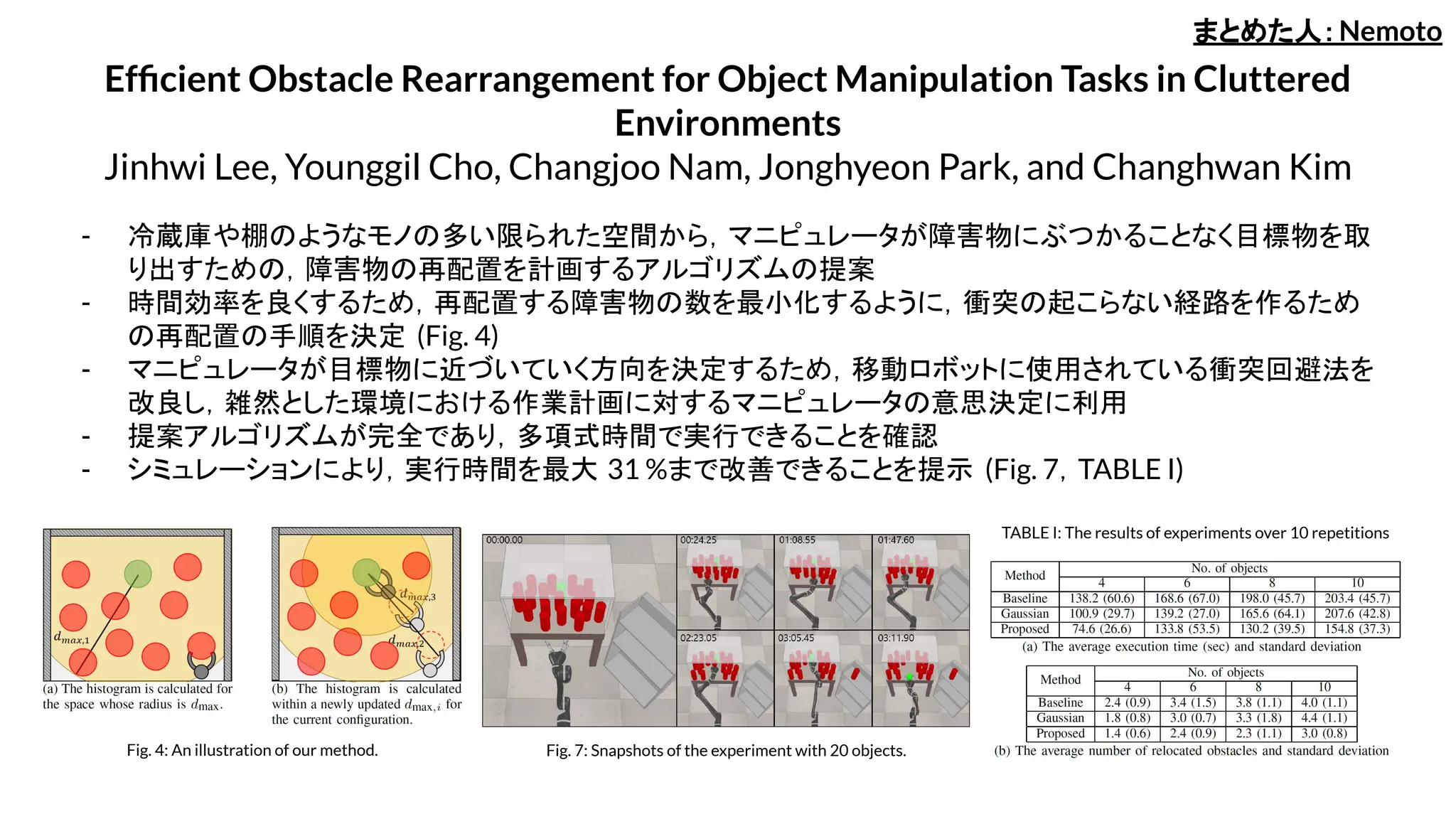
Efficient Obstacle Rearrangementfor Object Manipulation Tasks in Cluttered
Environments
Jinhwi Lee, Younggil Cho, Changjoo Nam, Jonghyeon Park, and Changhwan Kim
- 冷蔵庫や棚のようなモノの多い限られた空間から,マニピュレータが障害物にぶつかることなく目標物を取
り出すための,障害物の再配置を計画するアルゴリズムの提案
- 時間効率を良くするため,再配置する障害物の数を最小化するように,衝突の起こらない経路を作るため
の再配置の手順を決定 (Fig. 4)
- マニピュレータが目標物に近づいていく方向を決定するため,移動ロボットに使用されている衝突回避法を
改良し,雑然とした環境における作業計画に対するマニピュレータの意思決定に利用
- 提案アルゴリズムが完全であり,多項式時間で実行できることを確認
- シミュレーションにより,実行時間を最大 31 %まで改善できることを提示 (Fig. 7,TABLE I)
まとめた人:Nemoto
Fig. 4: An illustration of our method. Fig. 7: Snapshots of the experiment with 20 objects.
TABLE I: The results of experiments over 10 repetitions
23.
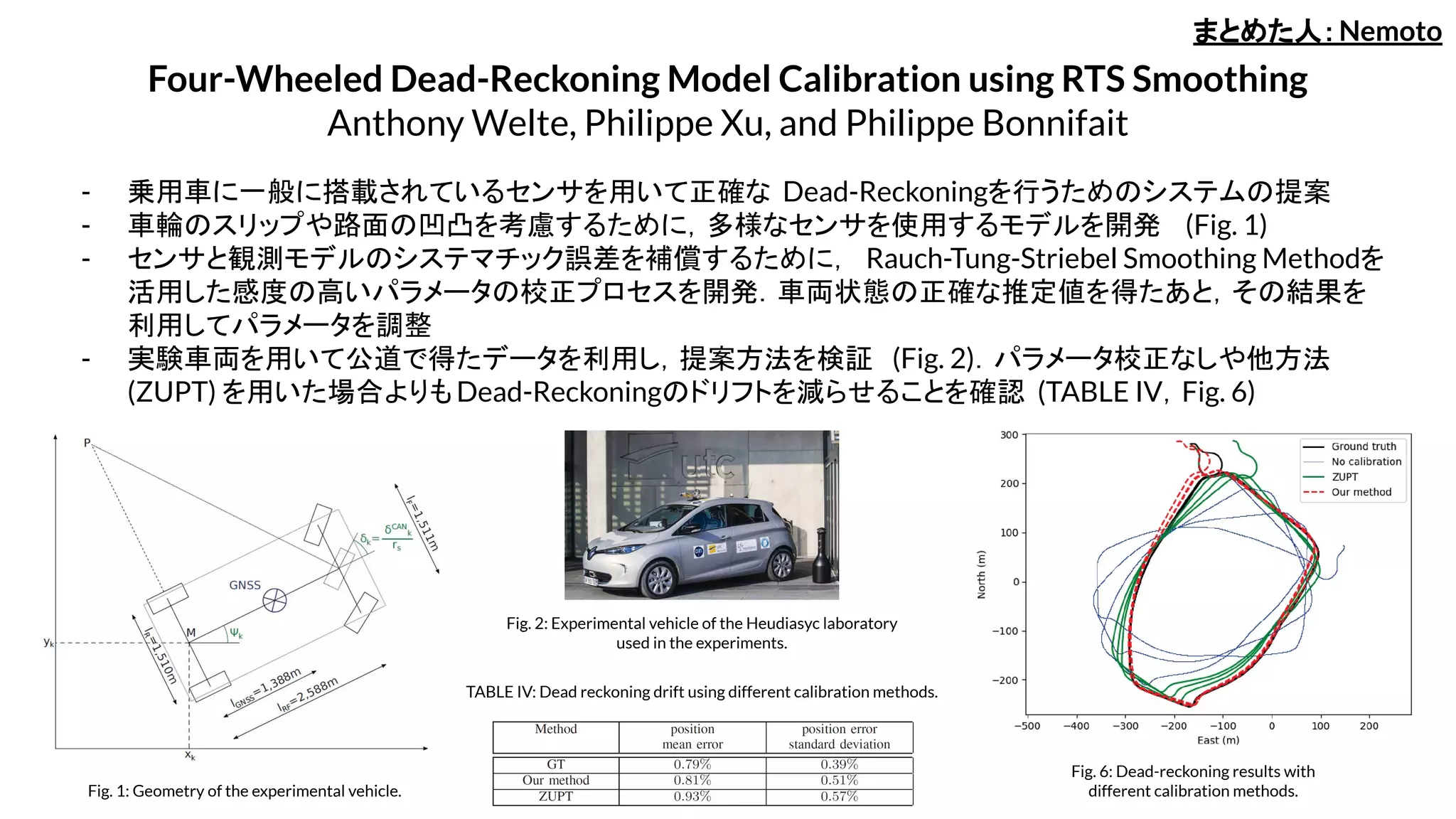
Four-Wheeled Dead-Reckoning ModelCalibration using RTS Smoothing
Anthony Welte, Philippe Xu, and Philippe Bonnifait
- 乗用車に一般に搭載されているセンサを用いて正確な Dead-Reckoningを行うためのシステムの提案
- 車輪のスリップや路面の凹凸を考慮するために,多様なセンサを使用するモデルを開発 (Fig. 1)
- センサと観測モデルのシステマチック誤差を補償するために, Rauch-Tung-Striebel Smoothing Methodを
活用した感度の高いパラメータの校正プロセスを開発.車両状態の正確な推定値を得たあと,その結果を
利用してパラメータを調整
- 実験車両を用いて公道で得たデータを利用し,提案方法を検証 (Fig. 2).パラメータ校正なしや他方法
(ZUPT) を用いた場合よりもDead-Reckoningのドリフトを減らせることを確認 (TABLE IV,Fig. 6)
まとめた人:Nemoto
Fig. 1: Geometry of the experimental vehicle.
Fig. 2: Experimental vehicle of the Heudiasyc laboratory
used in the experiments.
TABLE IV: Dead reckoning drift using different calibration methods.
Fig. 6: Dead-reckoning results with
different calibration methods.
24.
DeltaMag: An ElectromagneticManipulation System with Parallel Mobile Coils
Lidong Yang , Xingzhou Du , Edwin Yu , Dongdong Jin and Li Zhang
- 実機として作ったシステムでは、 3つのコイルを用いて磁力場を生じさせている
- 磁性物体を物理的に繋ぐことなくリモートで操作することが可能なモバイルコイルを用いた
磁性マニピュレーションシステムの提案
- コイルの位置が正確に操作できる為、磁性を持つカプセルやカテーテルを直径が 200mm以上
の管の中において移動させることを確認した
まとめた人:Souta Hirose
25.
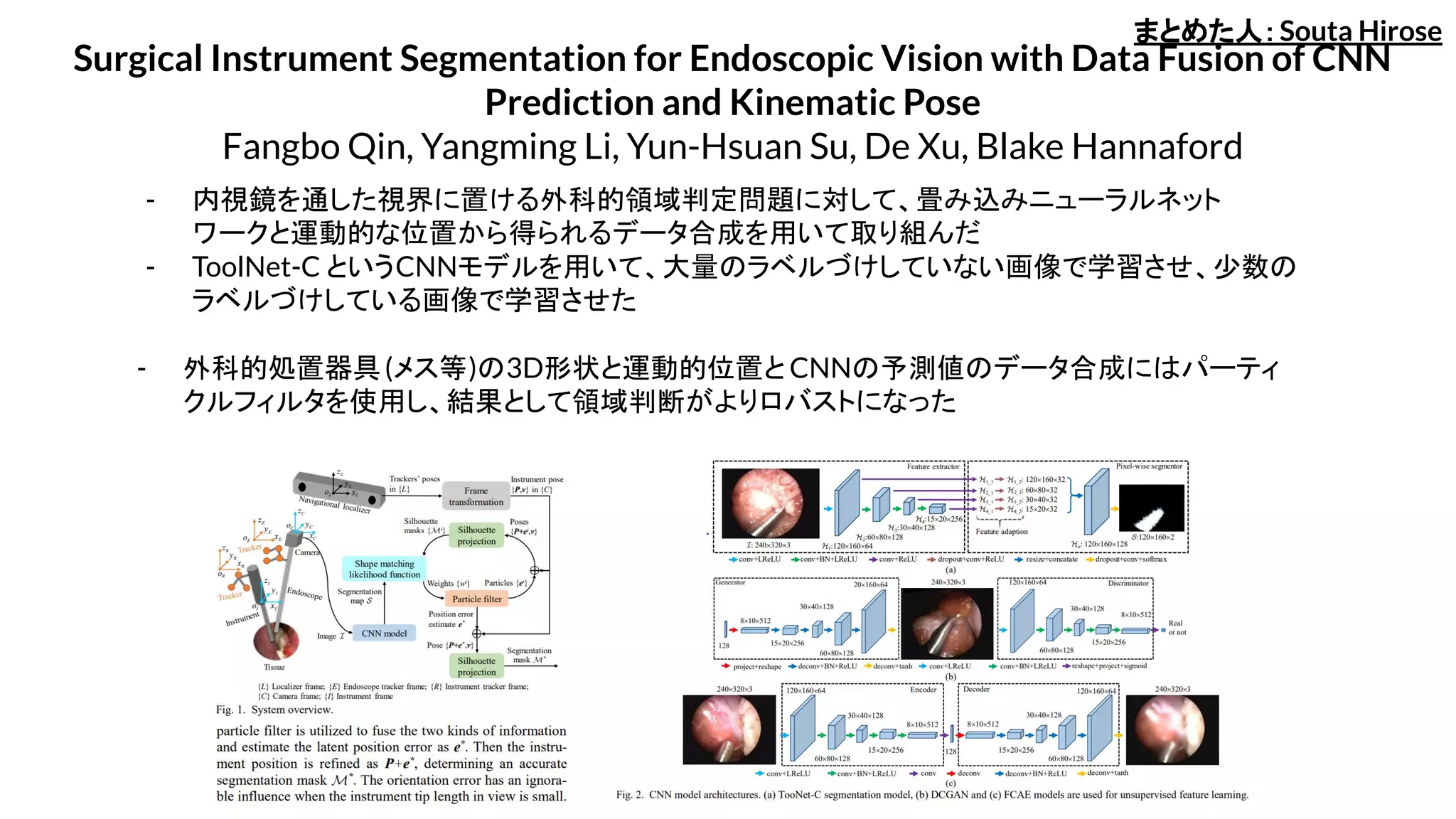
Surgical Instrument Segmentationfor Endoscopic Vision with Data Fusion of CNN
Prediction and Kinematic Pose
Fangbo Qin, Yangming Li, Yun-Hsuan Su, De Xu, Blake Hannaford
- ToolNet-C というCNNモデルを用いて、大量のラベルづけしていない画像で学習させ、少数の
ラベルづけしている画像で学習させた
- 内視鏡を通した視界に置ける外科的領域判定問題に対して、畳み込みニューラルネット
ワークと運動的な位置から得られるデータ合成を用いて取り組んだ
- 外科的処置器具(メス等)の3D形状と運動的位置と CNNの予測値のデータ合成にはパーティ
クルフィルタを使用し、結果として領域判断がよりロバストになった
まとめた人:Souta Hirose
26.
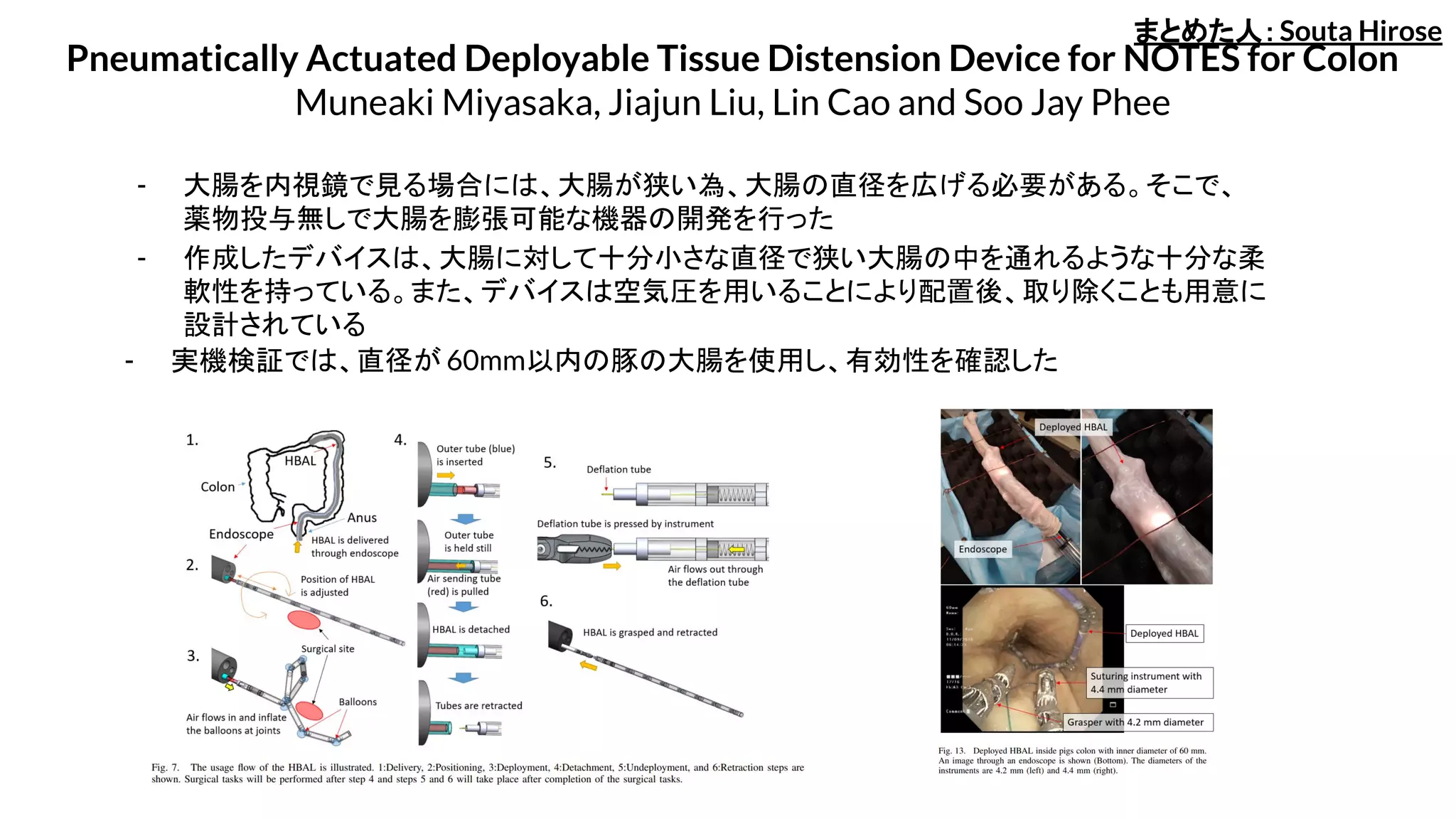
Pneumatically Actuated DeployableTissue Distension Device for NOTES for Colon
Muneaki Miyasaka, Jiajun Liu, Lin Cao and Soo Jay Phee
- 作成したデバイスは、大腸に対して十分小さな直径で狭い大腸の中を通れるような十分な柔
軟性を持っている。また、デバイスは空気圧を用いることにより配置後、取り除くことも用意に
設計されている
- 大腸を内視鏡で見る場合には、大腸が狭い為、大腸の直径を広げる必要がある。そこで、
薬物投与無しで大腸を膨張可能な機器の開発を行った
- 実機検証では、直径が 60mm以内の豚の大腸を使用し、有効性を確認した
まとめた人:Souta Hirose
27.
Steering a Multi-armedRobotic Sheath Using Eccentric Precurved Tubes
Jiaole Wang, Junhyoung Ha and Pierre E. Dupont
- 開発したシステムは最小化されており、脳外科手術で使用されることを想定しおり、複数の侵
襲領域に拡張できると考えている
- 操作可能なシースに 2つの独立したマニピュレータを通したシステムの開発
- 2つのマニピュレータは回転動作を用いることによって、他のマニピュレータと同様に押す操作
や引く動作が可能となっている
まとめた人:Souta Hirose
Explicit Model PredictiveControl of a Magnetic Flexible Endoscope
Bruno Scaglioni, Luca Previtera , James Martin, Joseph Norton, Keith L. Obstein, and
Pietro Valdastri
- 提案する手法によって、アームに取り付けられた永久磁石の動きを計算すること
が可能になる(内視鏡の先端にも磁石がついている )
- 磁力によって操作される柔軟な内視鏡の非線形最適化に明示的モデル予測制御を適用
することを提案(磁性カプセルを制御対象とした閉ループ制御の研究 )
- 実機検証では、大腸を模擬したチューブの中を上記のシステムによって内
視鏡を操作した
まとめた人:Souta Hirose
30.
Jointly Learning toConstruct and Control Agents using Deep Reinforcement Learning
Charles Schaff David Yunis Ayan Chakrabarti Matthew R. Walter
- 方策を学習させる際に , 物理的な設計パラメーターも同時に最適化させる手法の提案 .
- 設計パラメータωは分布pΦ
(ω)に従うとし, 分布のパラメータΦも最適化させる(Fig2).
- Hopper, Ant, Walkerタスクで実験. 強化学習にはPPOを使用. ここでの設計パラメータは , リンクごとの長さ
や太さ, 重さなど.
- 学習させると, 胴体, 脚部の軽量化, 脚部の延長, などの最適化がみられた (Ant).
- ランダムなω, ベイズ最適化による ωの最適化と比較して大きく性能を上回った .
まとめた人:Toshinori Kitamura
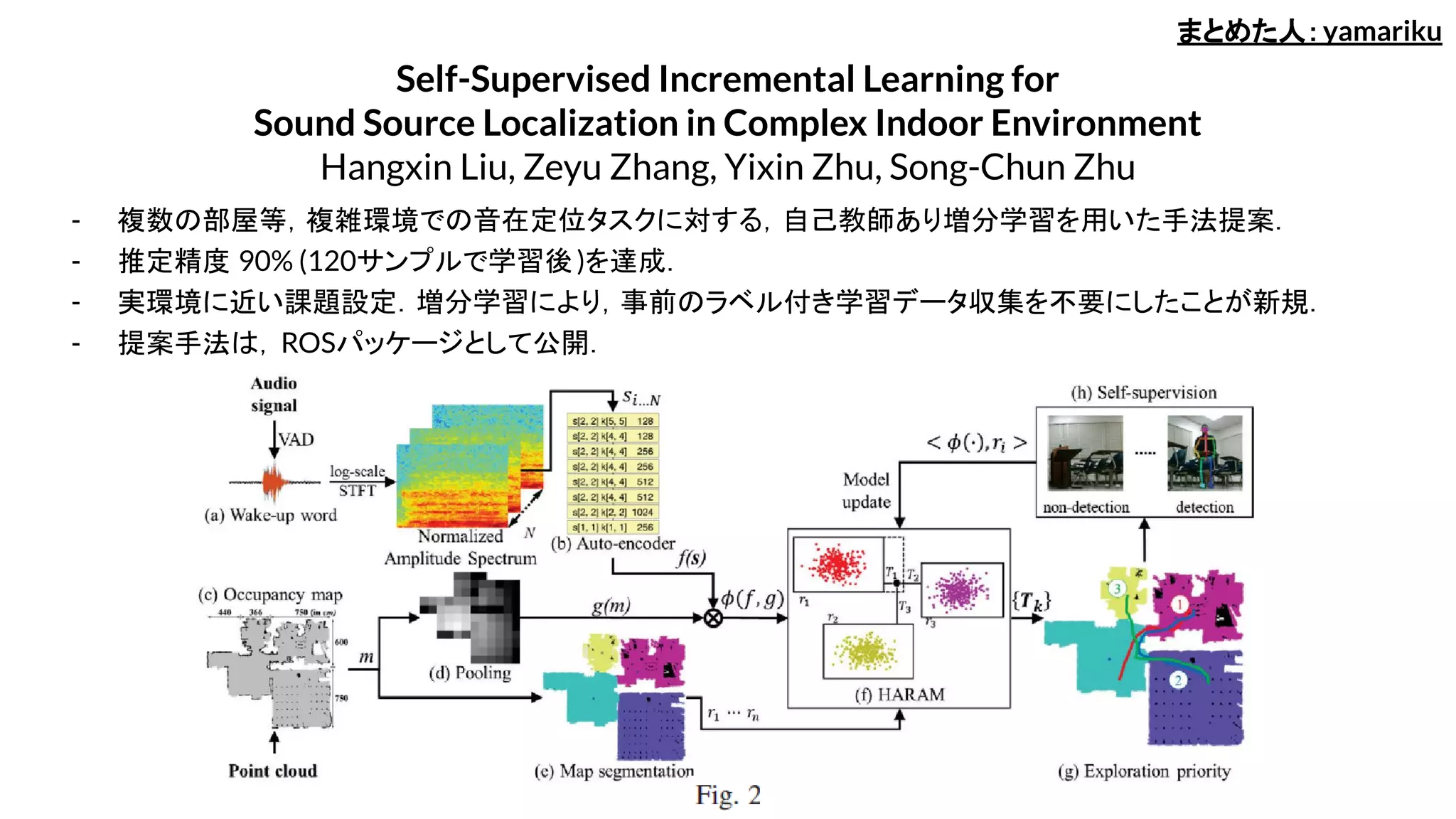
Diffraction-Aware Sound Localizationfor a Non-Line-of-Sight Source
Inkyu An, Doheon Lee, Jung-woo Choi, Dinesh Manocha, and Sung-eui Yoon
- 室内環境での遮蔽領域音源の音在定位で,既存手法を上回る精度(誤差平均 0.7m)を達成.
- レイトレースベースの音波伝搬に, wedge近傍での回折の考慮を加えたことがポイント.
- 音波回折の計算のため,事前に SLAMで環境マップを作り, wedge部分を抽出している.
- 評価は,7 x 7 x 3 mの室内で,3m先(途中に遮蔽物あり)の音源位置を推定する方法で行った.
まとめた人:yamariku
38.
Vision-based Teleoperation ofShadow Dexterous Hand
using End-to-End Deep Neural Network
Shuang Li, Xiaojian Ma, Hongzhuo Liang, Michael G¨orner, Philipp Ruppel,
Bin Fang, Fuchun Sun, Jianwei Zhang
- マーカレスビジョンで 5本指ロボットハンドを遠隔操作する,ニューラルネット “TeachNet”の提案.
- 操作者の手の1視点 depth画像から,19自由度の関節の制御パラメタを推定する方法を実現.
- 学習用データは,Big-Hand2.2M Dataset (手の画像)から,関節姿勢マッピングを行い, Gazeboでロボット
ハンドのdepth画像を生成して準備. 40万セットを学習に使用.
まとめた人:yamariku
39.
Julia for robotics:simulation and real-time control in a high-level programming language
Twan Koolen and Robin Deits
- Julia言語によるロボット制御 ,シミュレーション環境のパッケージ提案.
- ローレベル制御(アクチュエータ等)と高次機能の実装を同一言語でできることがアピールポイント .
- Julia言語は,Pythonと同等の書きやすさを保ちながら, JITコンパイルによりC++に肉薄するパフォーマンス
を追求できることが強み.
まとめた人:yamariku
本文より引用
https://github.com/tkoolen/julia-robotics-paper-code
40.
Motion Planning Templates:
AMotion Planning Framework for Robots with Low-power CPUs
Jeffrey Ichnowski and Ron Alterovitz
- モーションプランニングのための C++テンプレートライブラリの提案.
- コンパイル時ポリモーフィズムにより,可読性,メンテナンス性の高さを維持しつつ,実行時の負荷軽減を
図った.
- Rasberry Pi Model 3Bによる性能検証では, SE(3) モーションプランニングタスクにおいて,既存ライブラリ
OMPLを上回る実行速度を達成した.
まとめた人:yamariku
41.
Passive Task-Prioritized Shared-ControlTeleoperation with Haptic Guidance
M. Selvaggio, P. Robuffo Giordano, F. Ficuciello and B. Siciliano
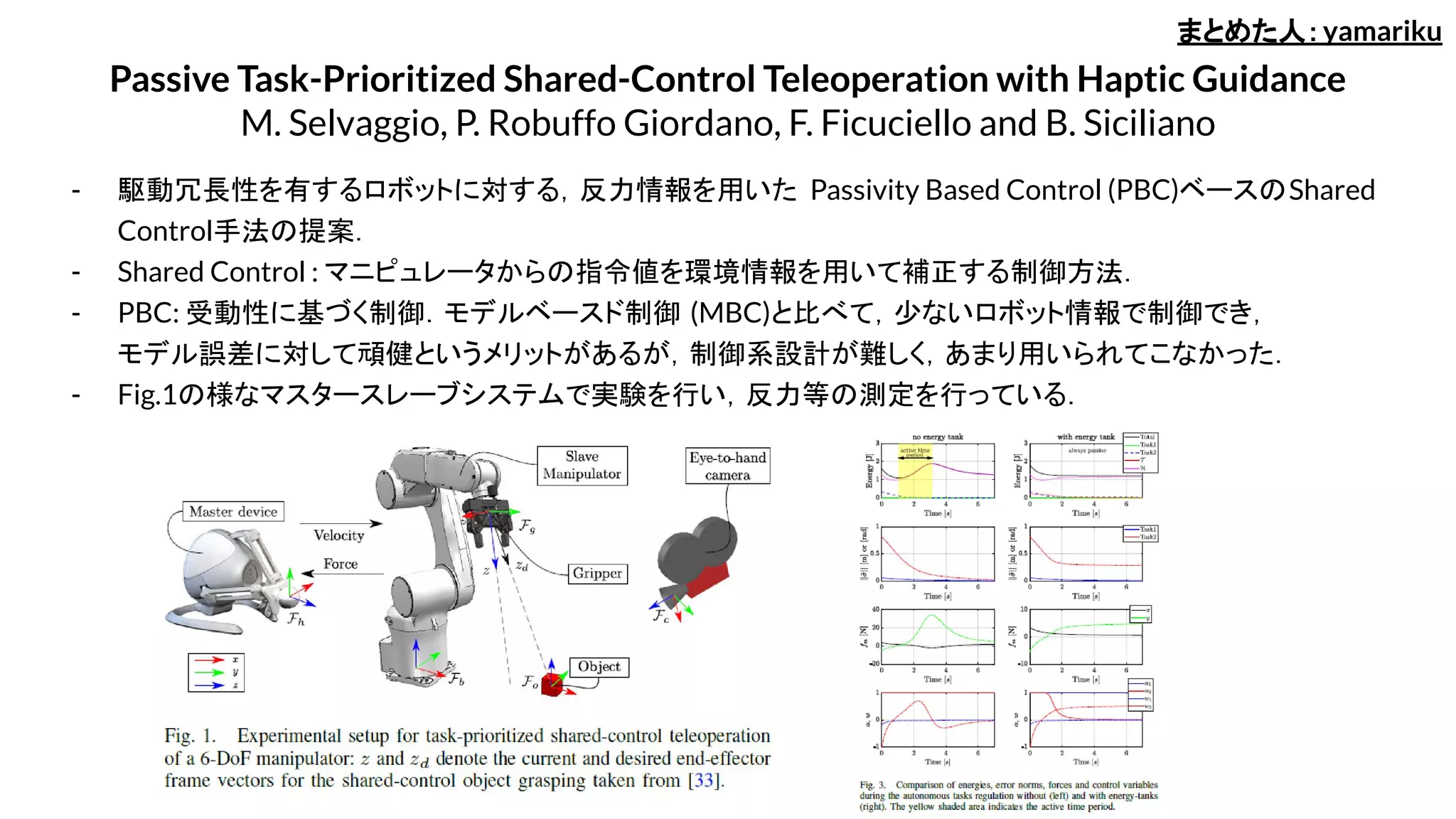
- 駆動冗長性を有するロボットに対する,反力情報を用いた Passivity Based Control (PBC)ベースのShared
Control手法の提案.
- Shared Control : マニピュレータからの指令値を環境情報を用いて補正する制御方法.
- PBC: 受動性に基づく制御.モデルベースド制御 (MBC)と比べて,少ないロボット情報で制御でき,
モデル誤差に対して頑健というメリットがあるが,制御系設計が難しく,あまり用いられてこなかった.
- Fig.1の様なマスタースレーブシステムで実験を行い,反力等の測定を行っている.
まとめた人:yamariku
42.
Quasi-Direct Drive forLow-Cost Compliant Robotic Manipulation
David V. Gealy, Stephen McKinley, Brent Yi, Philipp Wu,
Phillip R. Downey, Greg Balke, Allan Zhao, Menglong Guo,
Rachel Thomasson, Anthony Sinclair, Peter Cuellar, Zoe McCarthy, and Pieter Abbeel
- 7自由度/2kgペイロード,人体スケールサイズの,安価な (< $5,000)ロボットアームの提案.
- バックドライバビリティ(外力による駆動系動作)を高めるため,疑似ダイレクトドライブを採用.
- 位置制御の定格動作周波数は 7.5Hz, repeatabilityは実験結果によると 4mm以下
まとめた人:yamariku


![Speeding Up Iterative Closest Point Using Stochastic Gradient Descent
Fahira Afzal Maken, Fabio Ramos and Lionel Ott (シドニー大,NVIDIA)
- 確率的勾配降下法(SGD)を用いることで,ICPによる点群マッチングの収束する速さを向上した.
- SGDを用いる手法では通常の ICPより10倍以上速度は向上する一方,精度は通常の ICPと遜色ない.
Fig.1 に他の手法との収束までに必要な処理点数の比較, TABLE1 速度・精度の比較.
- 点群の位置を[0, 1]で正規化することで,異なるデータに対してもパラメータの変更を加えることなく同等の
パフォーマンスを出すことができる.
- OptimizerにADAMを用いた場合,バッチサイズ 15以上で十分な性能が得られることがわかった.
まとめた人:Daiki Mori](https://image.slidesharecdn.com/ro-190929105051/75/Robotpaper-Challenge-2019-09-ver2-4-2048.jpg)







































![[サーベイ論文] Deep Learningを用いた歩行者検出の研究動向](https://cdn.slidesharecdn.com/ss_thumbnails/pedsurvey-161216014456-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)












![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)










![[DL輪読会]BADGR: An Autonomous Self-Supervised Learning-Based Navigation System](https://cdn.slidesharecdn.com/ss_thumbnails/20200403rindokukai-200403043041-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...](https://cdn.slidesharecdn.com/ss_thumbnails/differentiablemappingnetworks-200707033539-thumbnail.jpg?width=640&height=640&fit=bounds)


















