Downloaded 318 times









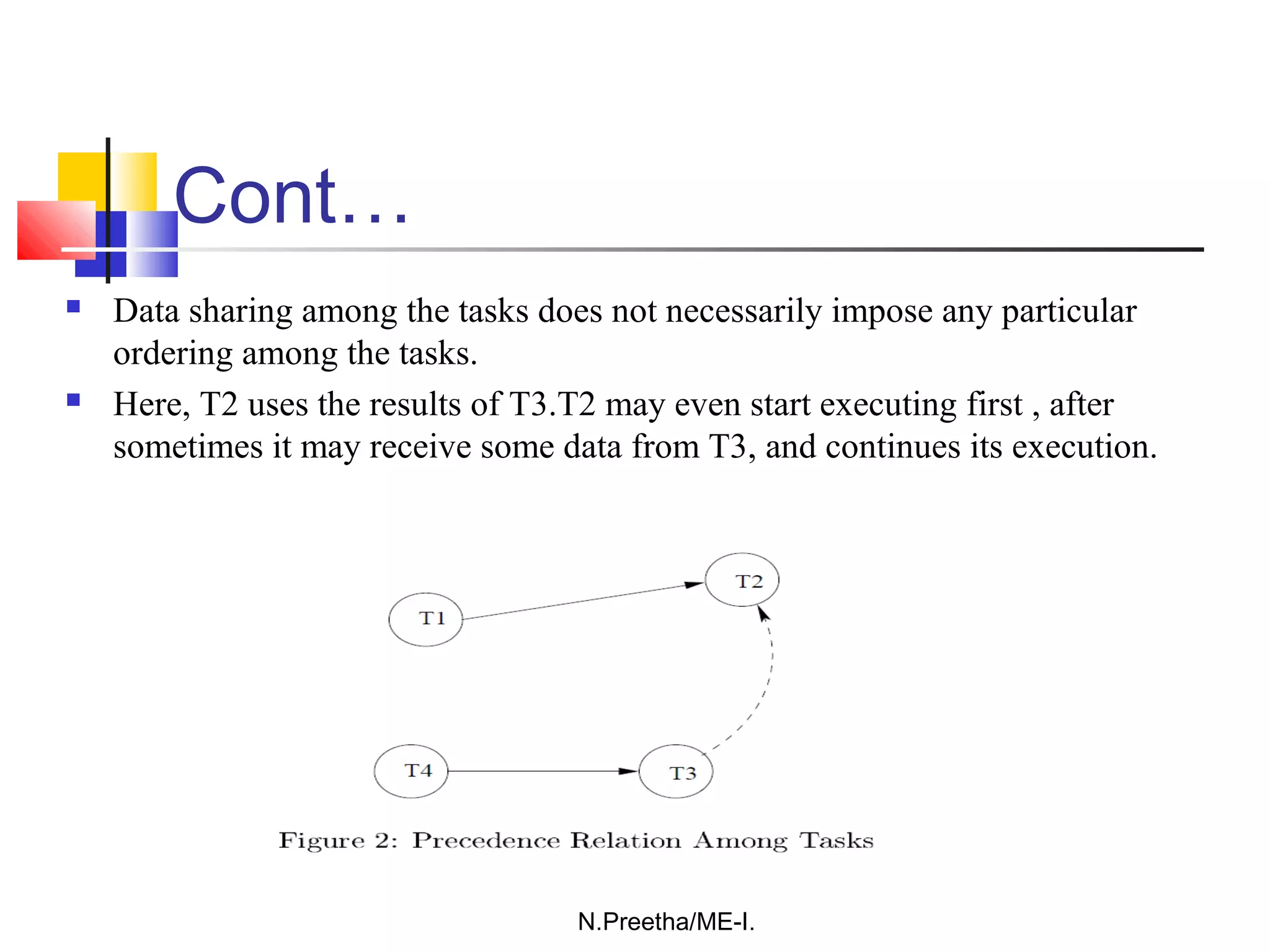











The document discusses real-time task scheduling, covering fundamental concepts, types of real-time tasks, and characteristics. It elaborates on the classification of tasks into periodic, sporadic, and aperiodic categories, alongside key terms such as deadlines, task precedence, and data sharing. Additionally, it outlines essential scheduling definitions including valid and feasible schedules, preemptive scheduling, and task utilization.