Downloaded 10 times

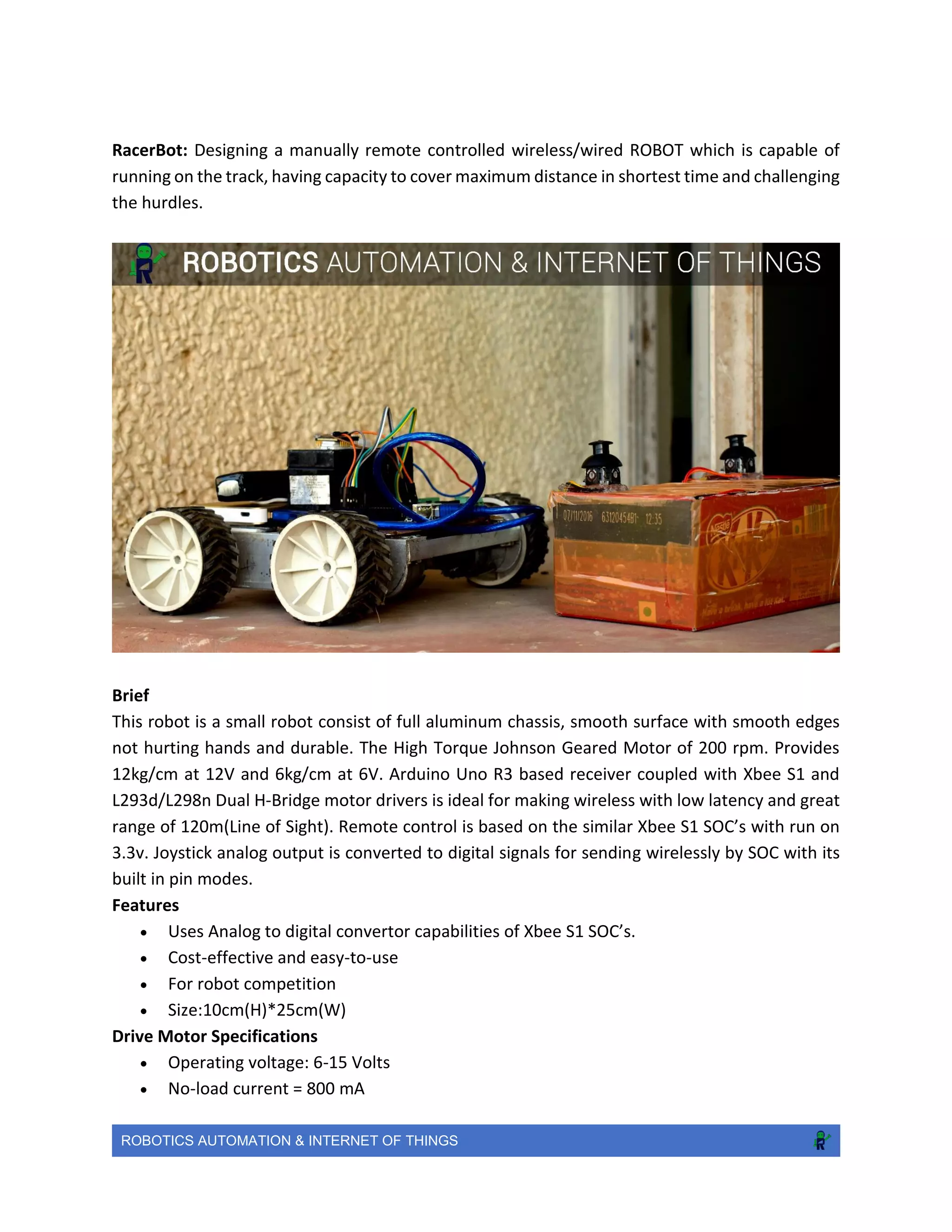
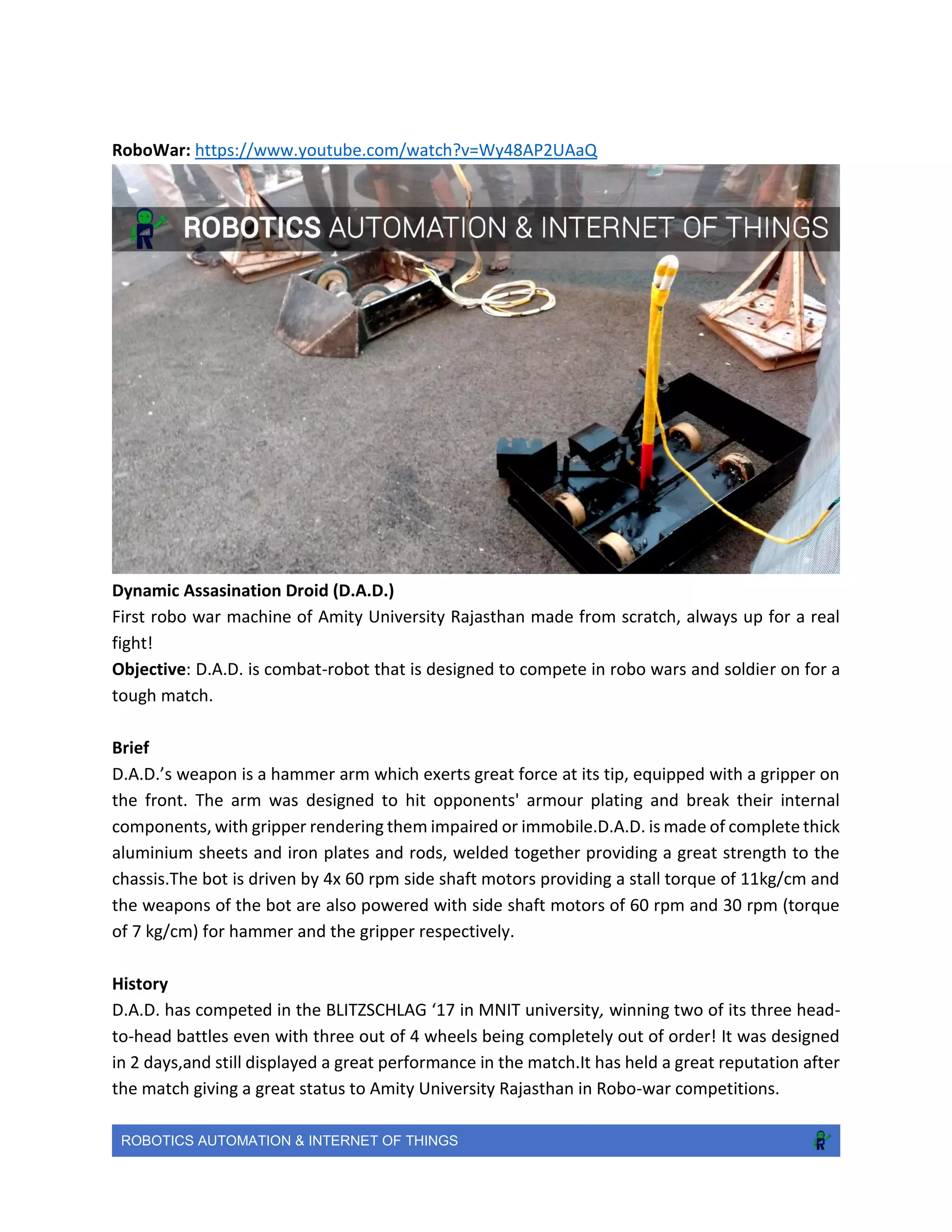
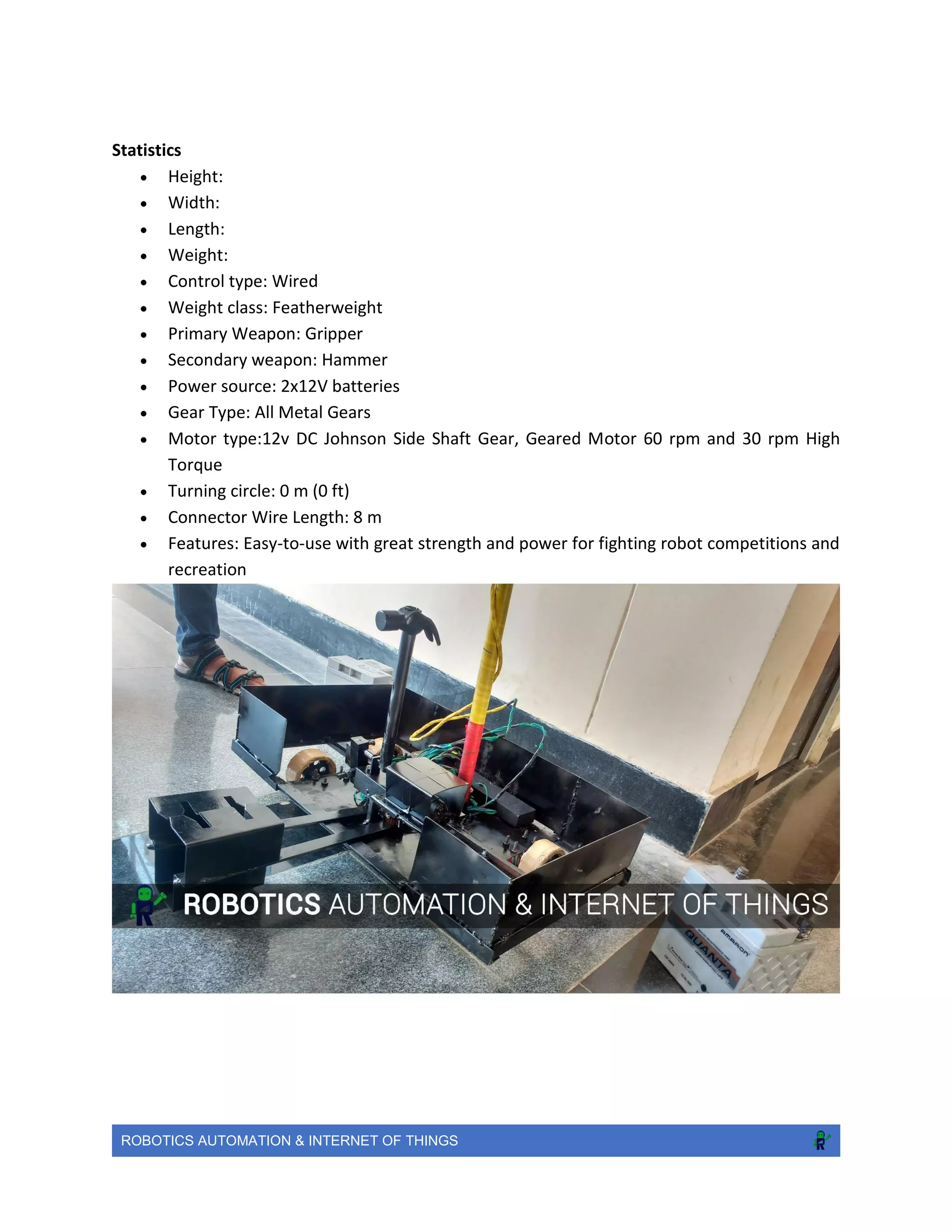
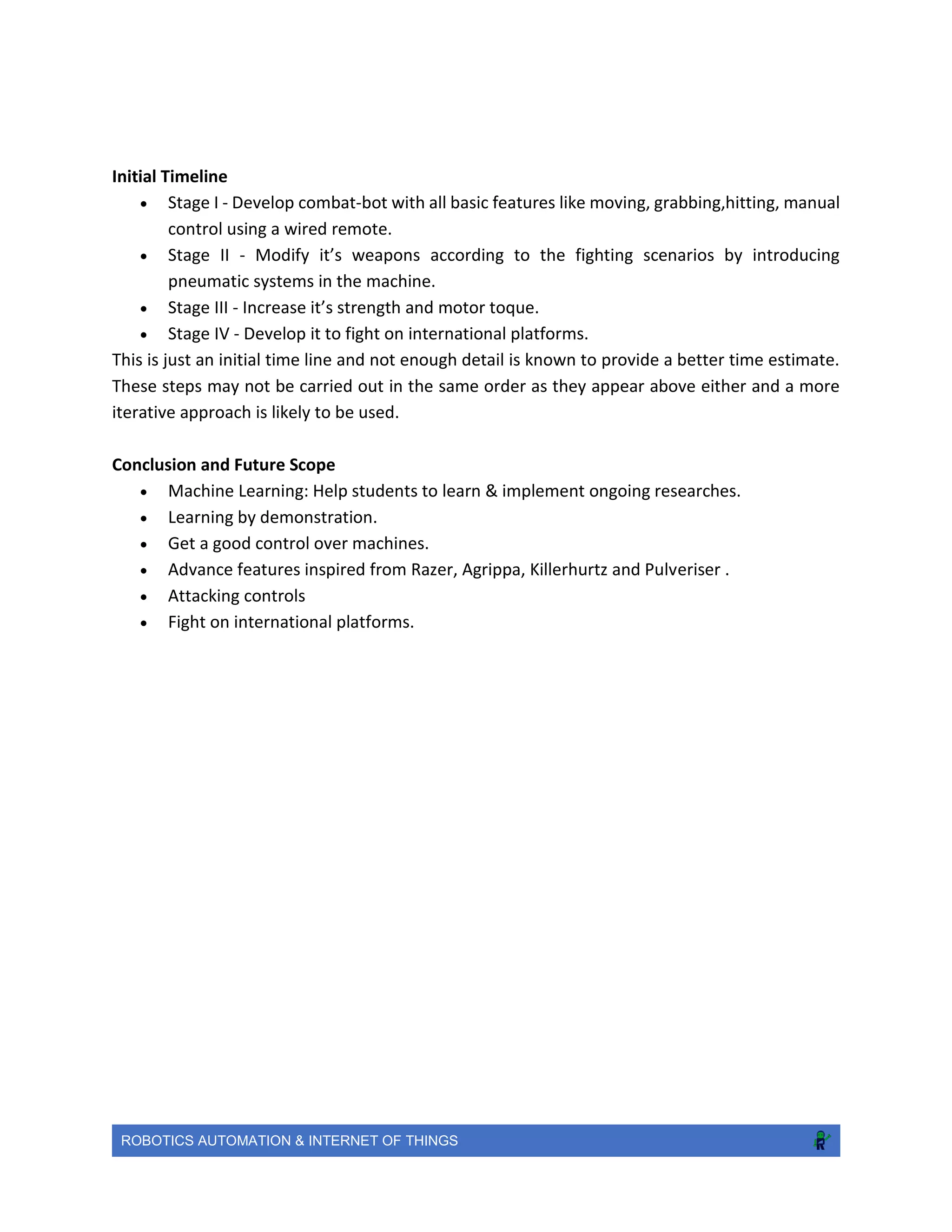
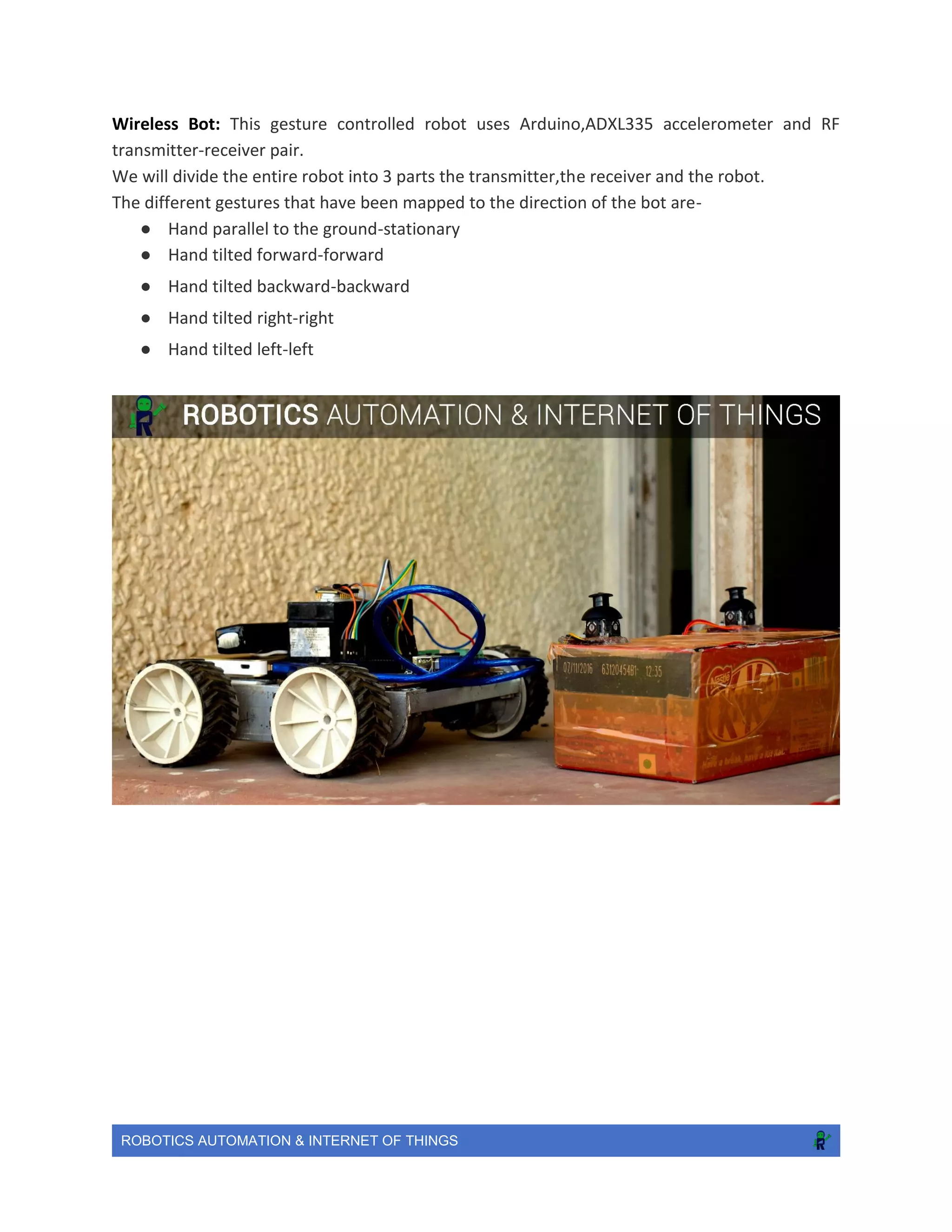
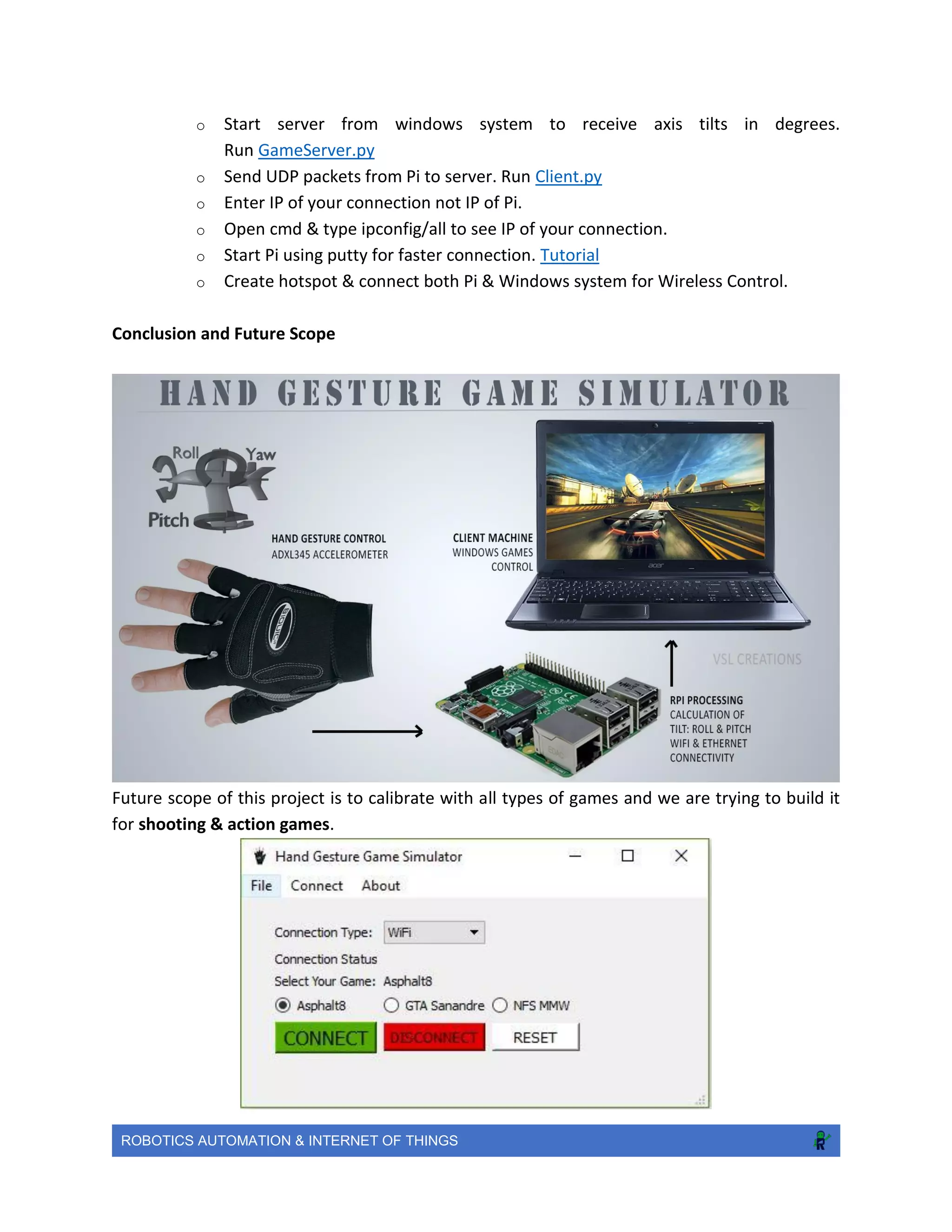
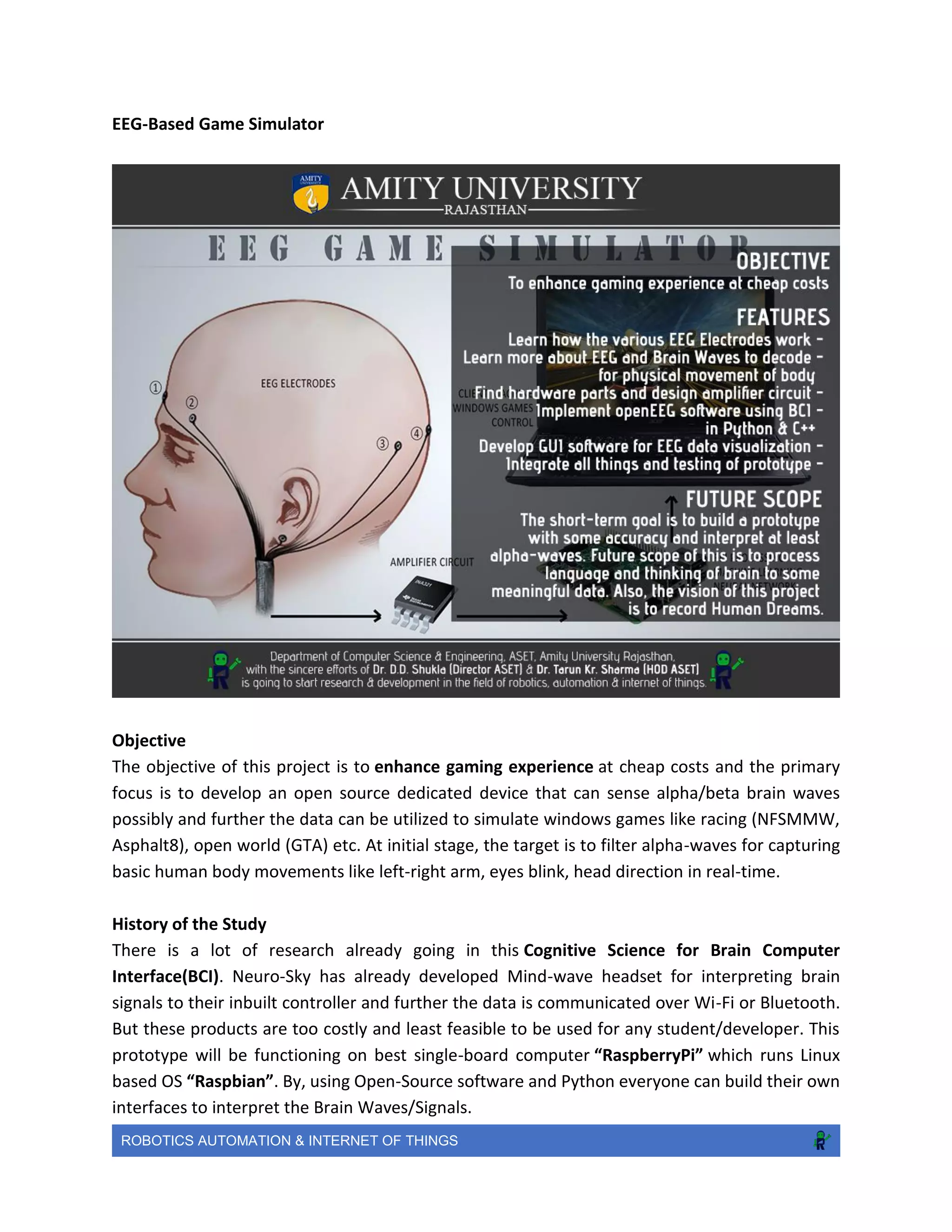
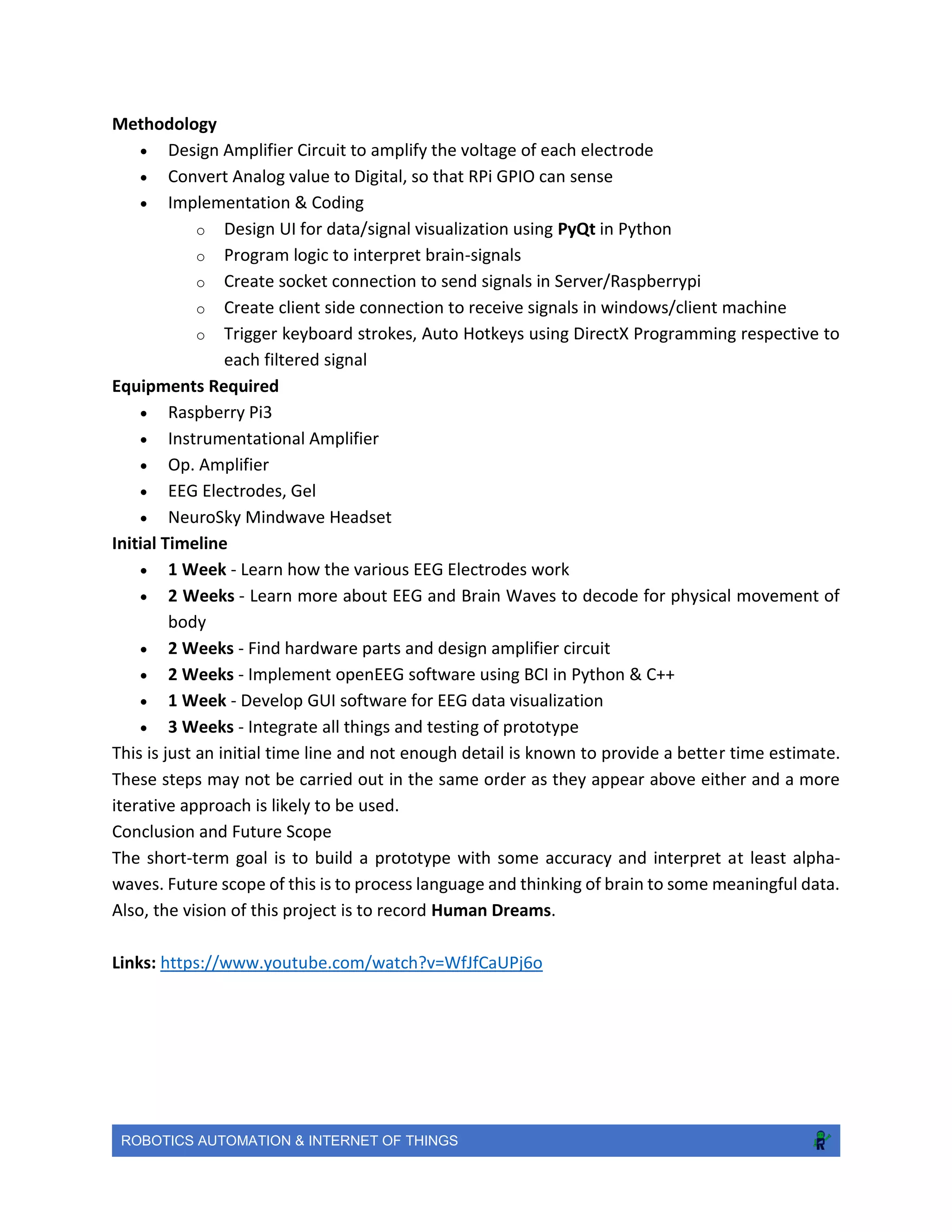




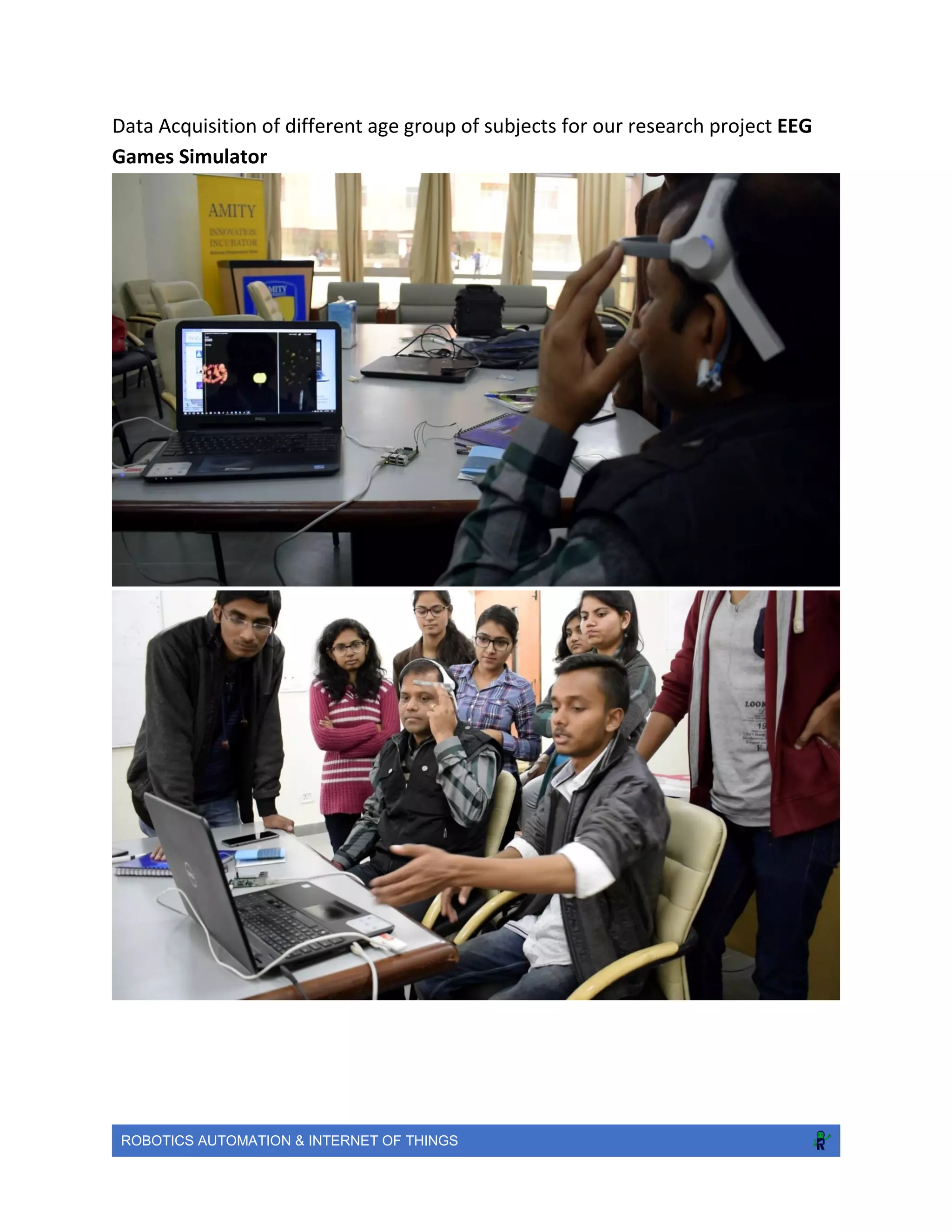


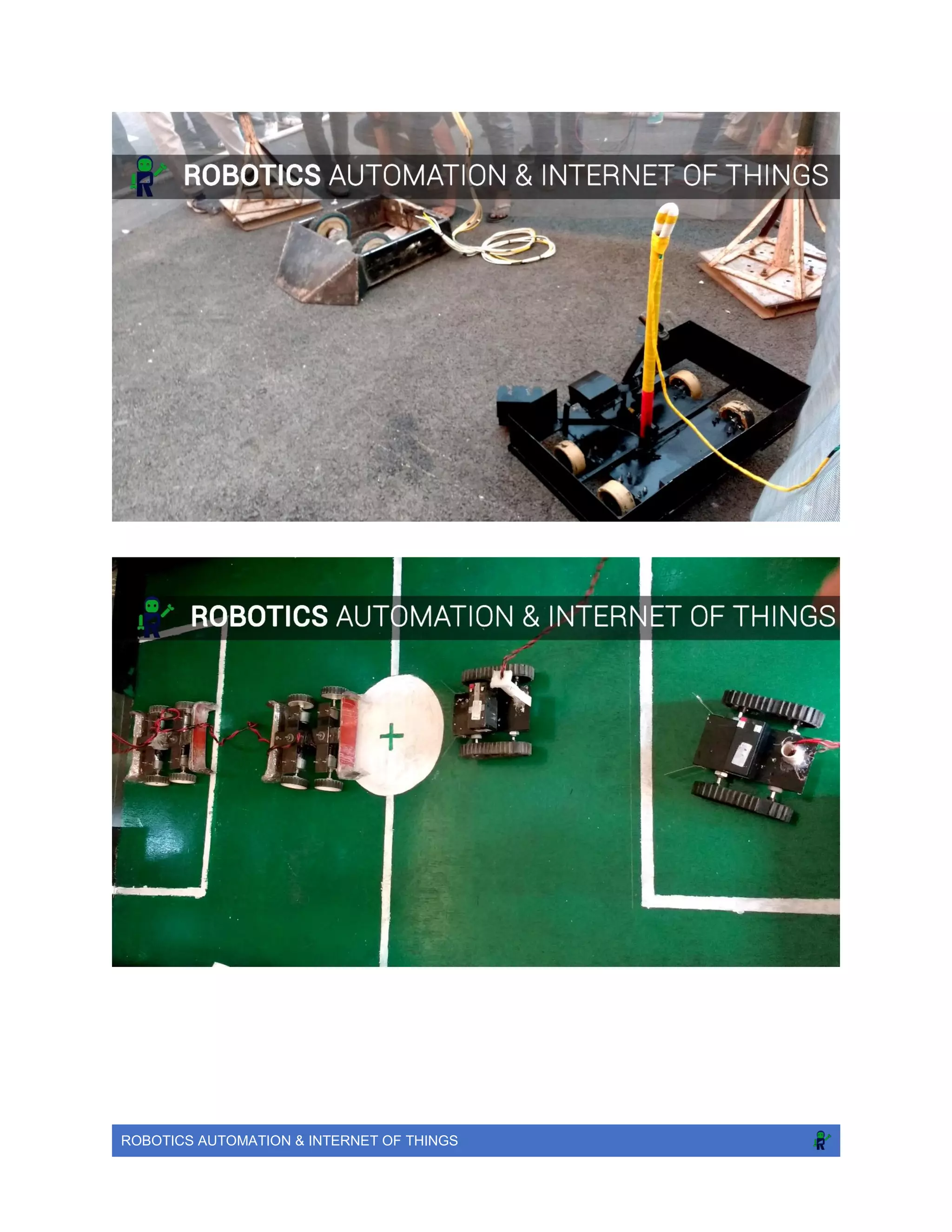
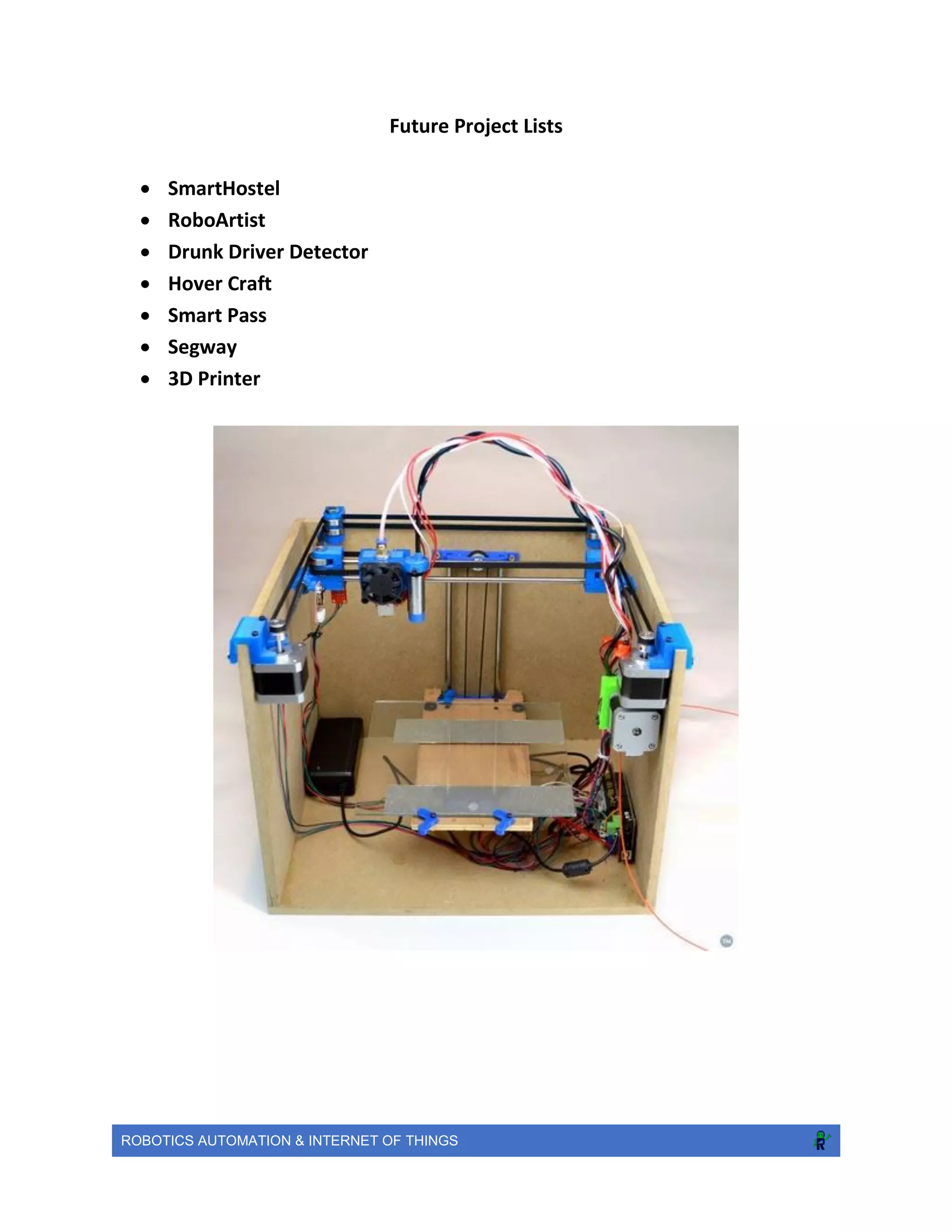

The document describes projects being conducted at the Robotics Automation & Internet of Things Lab (RAIOT Lab) at Amity University Rajasthan. The RAIOT Lab focuses on hands-on learning and research related to robotics and IoT. Current projects include developing a 17 DOF humanoid robot, soccer playing robot, remote controlled race car, combat robot for robot wars competitions, and gesture controlled robot. The lab is also working on automation projects like a hand gesture controlled game simulator and an EEG-based game simulator. The goal is to enhance gaming experiences using affordable technologies.



































































![Securing Firmware Updates [FOTA/OTA DFU]](https://cdn.slidesharecdn.com/ss_thumbnails/securingfirmwareupdatesfotaotadfu-210227100204-thumbnail.jpg?width=640&height=640&fit=bounds)


























