BACKGROUND OF PROJECT
Toincrease the safety level when fire fighter extinguish the fire.
To generate technique to check fires without involving humans directly.
To Easy and fast reach the fire area.
Decrease the time consuming for detection of fire and healing the fire.
The main aim the project is designing fire extinguisher
device, which can sense the fire and eliminate the dangerous
2.
Introduction
• The FireFighting Robot is designed to detect and extinguish
small fires automatically.
• • Uses three flame sensors (left, forward, right)
• • Navigates to fire source
• • Activates built-in fire extinguishing system
• • Water pump ejects water at fire source
• • Helps prevent major accidents and human loss
3.
OBJECTIVES OF THEPROJECT
To create the program for the sensor and motor driver.
To study about microcontroller PIC16F887 and learn about configuration.
To express use of various sensor for different application.
To study the mechanical fundamental for the submersible pump and DC
motor.
To examine a robot, which can search, detect & extinguish fire area instantly.
As per the mechanical fundamental design and create robot.
Examine robot performance to sense the direction of fired area.
4.
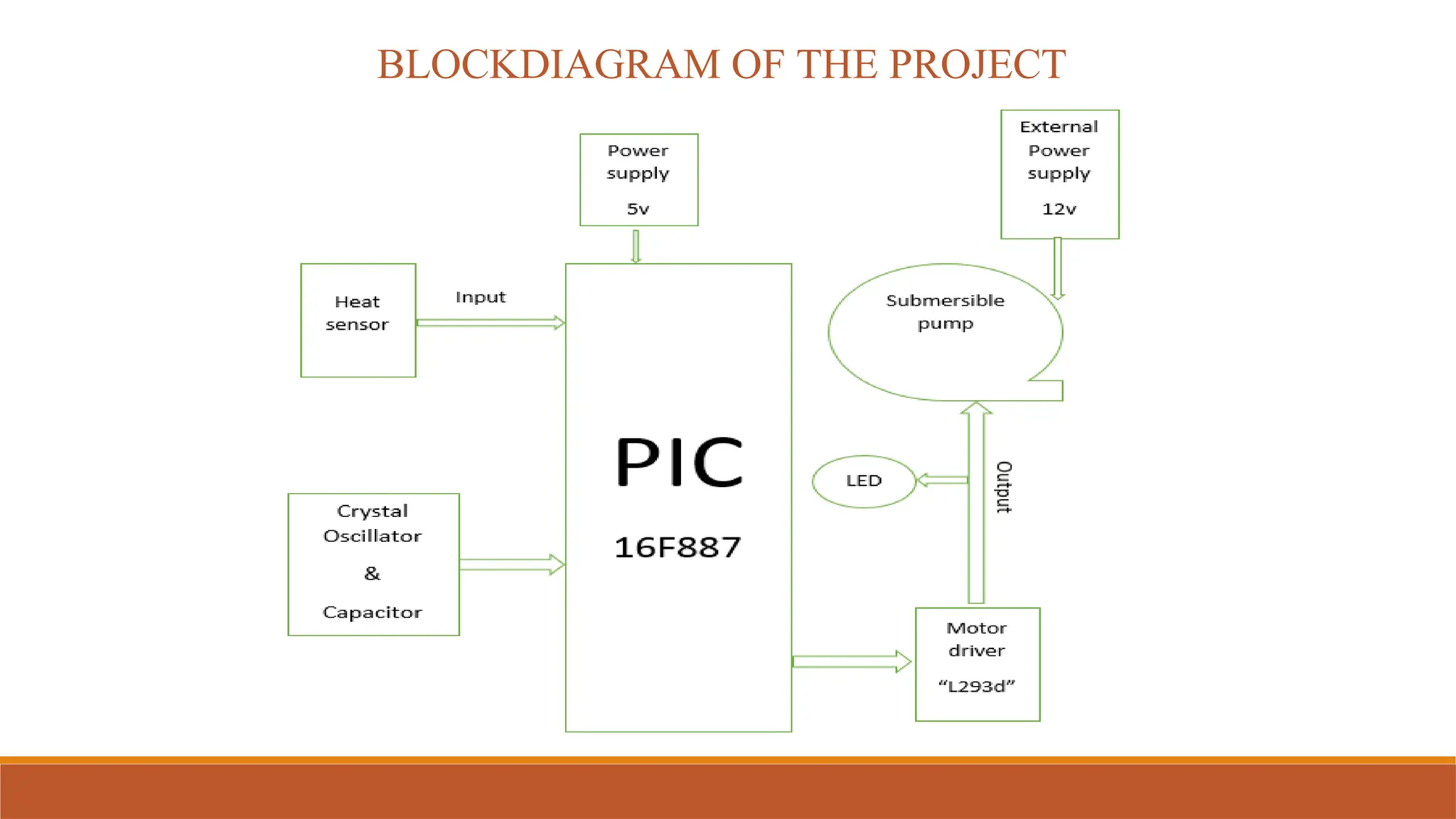
Block Diagram
• Arduino,Servo, Pump, Motor Driver, Left & Right Motors,
Flame Sensors, Buzzer
• Refer original PPT for full diagram (diagram retained).
LIST OF COMPONENETS
Microcontroller– PIC16f887
Motor driver – L293d
Heat sensor
Mini Submersible pump
LED
DC motors
Frame
Wired remote
Power supply - Butteries
General parts like wires, capacitator,
oscillators, PCB, Pickit module etc.
7.
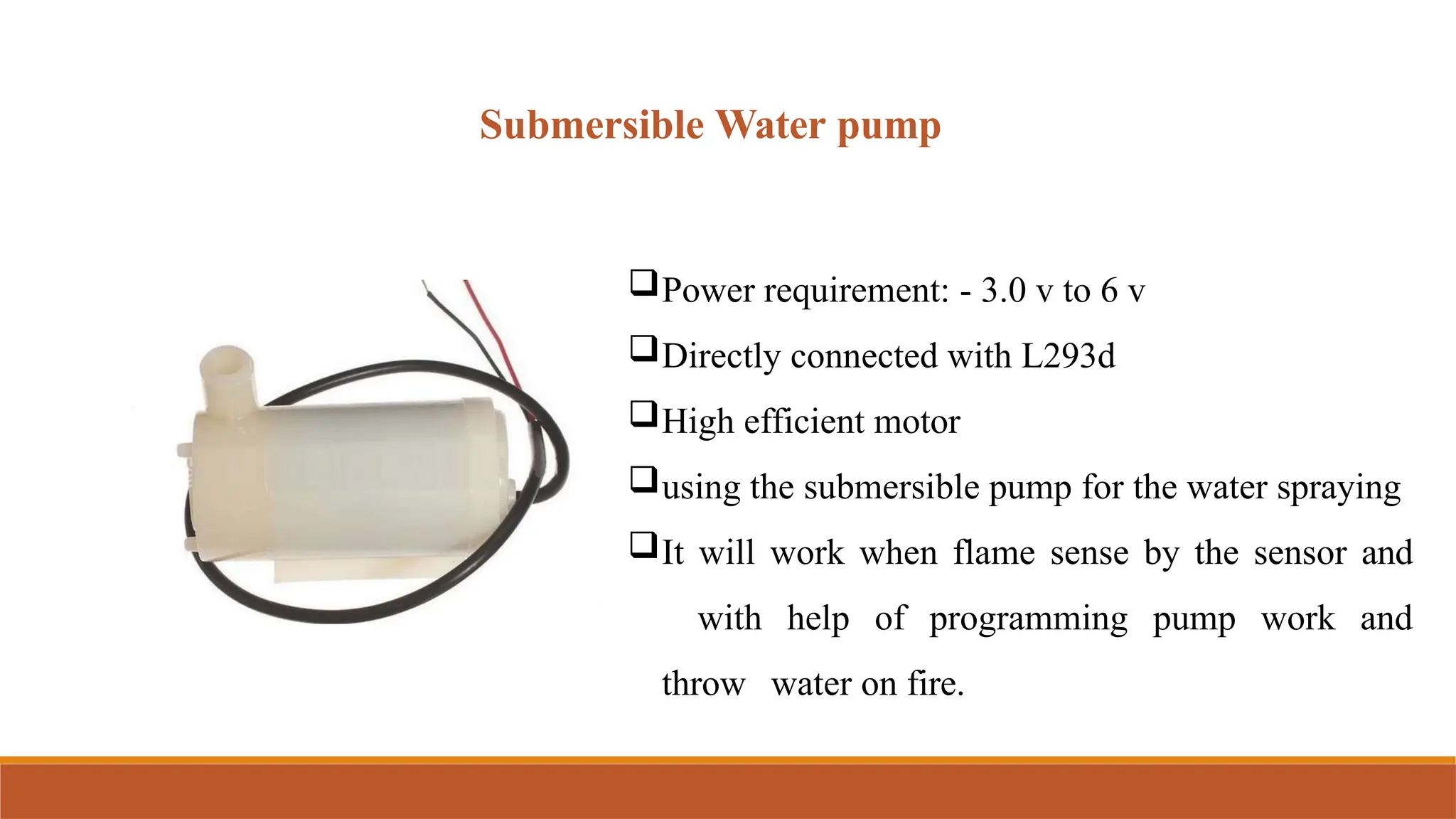
Submersible Water pump
Powerrequirement: - 3.0 v to 6 v
Directly connected with L293d
High efficient motor
using the submersible pump for the water spraying
It will work when flame sense by the sensor and
with help of programming pump work and
throw water on fire.
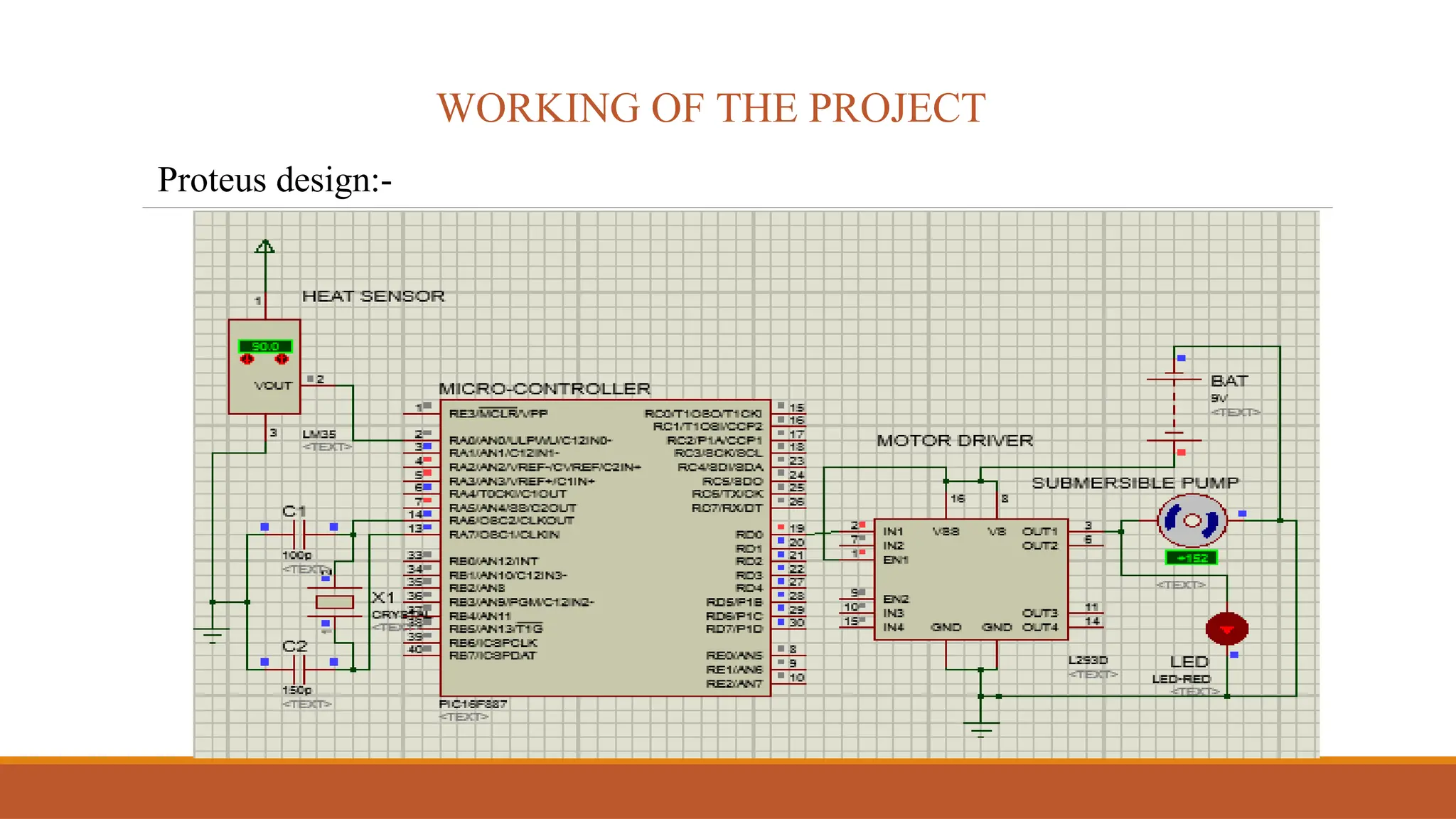
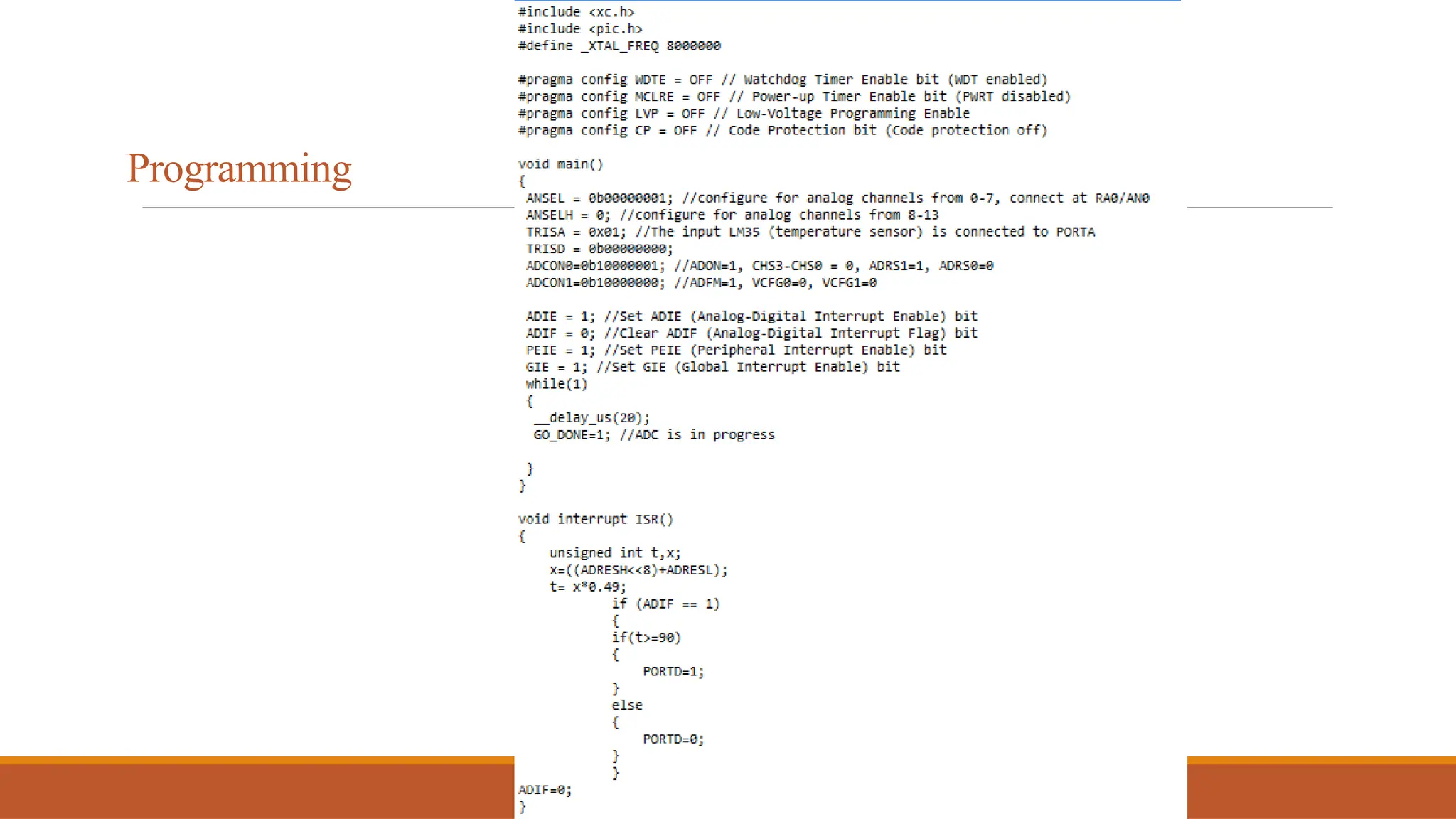
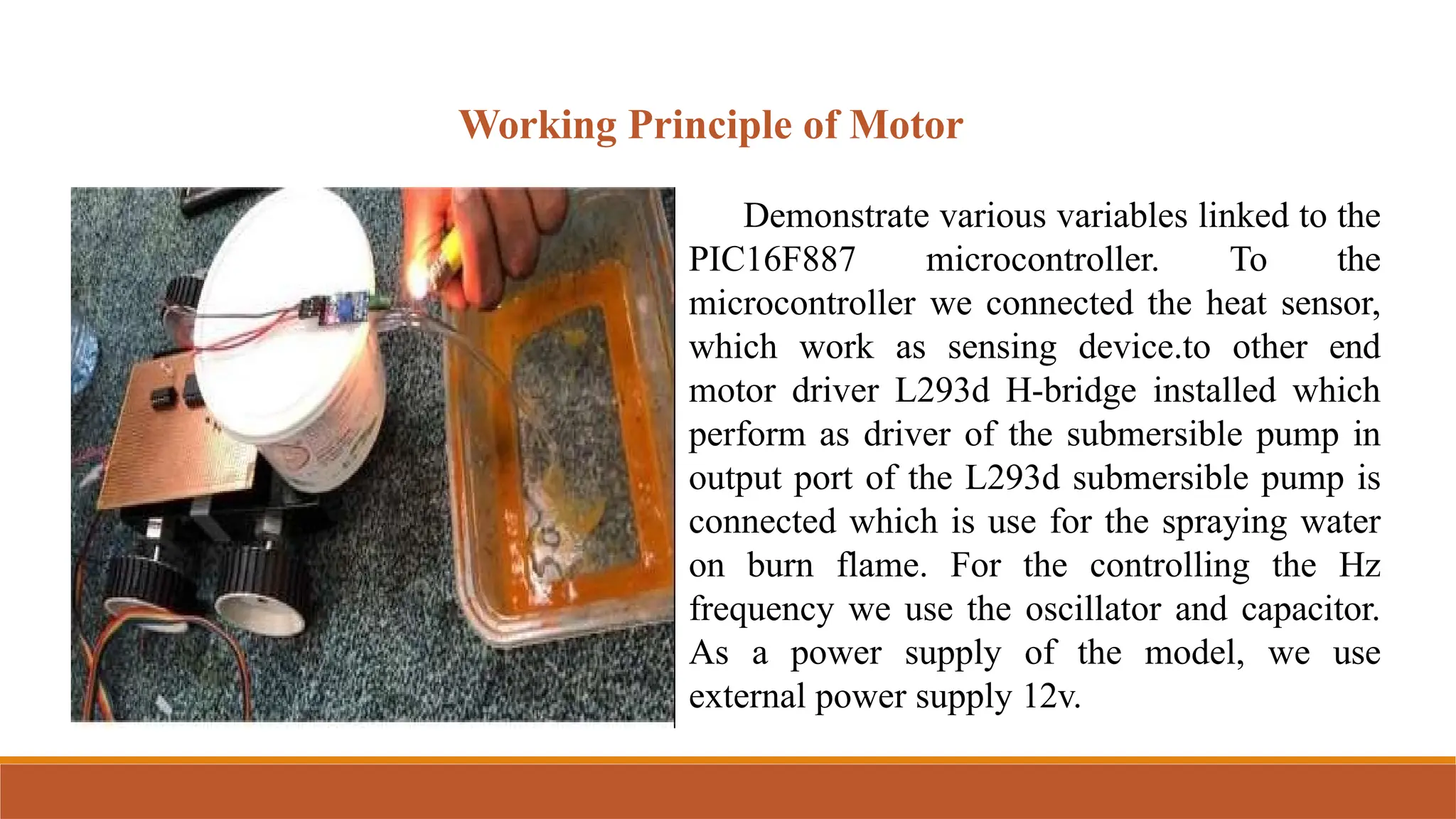
Working Principle ofMotor
Demonstrate various variables linked to the
PIC16F887 microcontroller. To the
microcontroller we connected the heat sensor,
which work as sensing device.to other end
motor driver L293d H-bridge installed which
perform as driver of the submersible pump in
output port of the L293d submersible pump is
connected which is use for the spraying water
on burn flame. For the controlling the Hz
frequency we use the oscillator and capacitor.
As a power supply of the model, we use
external power supply 12v.
12.
TROUBLESHOOTING
During the selectionof sensor we face which is best for our project.
Problem with the calculation of temperature from sensor output
in program.
Use of Motor Driver L293D.
13.
APPLICATION
Easily extinguishes thearea where explosion of heat is high.
Suitable for a fire department.
Use in Chemical industries without interfering the human
beings.
Time consuming during the explosion of fire.
14.
ADVANTAGES
To detect theexact direction of the fire source.
Reduce the human effort.
Reliable and economical.
Not sensitive to weather conditions.
Efficiency of model is high.
15.
DISADVATEGES
No monitoring systemfor the robot.
It is not use when the fire is in large area.
Sensing range of sensor is up to 1 Ft so no sense more than 1 Ft.
Only sense the fire in between the 60° angle.
16.
FUTURE SCOPE
With improvementin design we can use during Wildfire.
With use of sprinkler we can cover vast area of fire.
Instead of water we can use CO2 or liquid N2.
With use of camera we can easily monitor fire area from any place.
17.
CONCLUSION
Our project ismain focused on reduce the hazardous situation in
fire. In our project we have made and implement modular design of
extinguish fire and reduce hazardous situation during fire fighting. With use
of microcontroller we integrate it and made it simple.