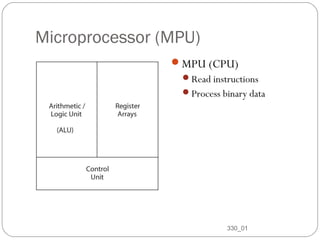
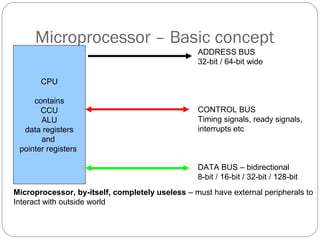
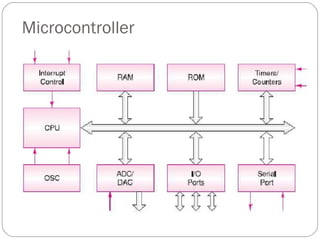
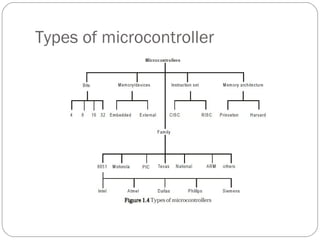
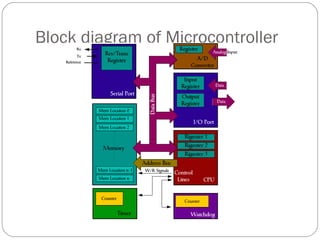
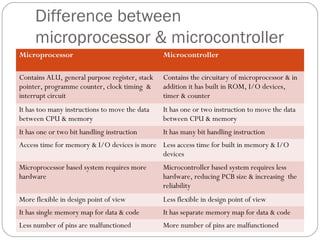
The microprocessor is the central processing unit of computers and electronic devices. Early microprocessors included 4-bit and 8-bit processors developed by Intel in the 1970s. Major developments included 16-bit processors like the Intel 8086 and 32-bit processors like the Intel 80386. Modern 64-bit processors include Intel Core i7 and i5. Microprocessors use a central processing unit, memory, and input/output systems to process instructions and data. Microcontrollers integrate a microprocessor with additional components like memory and input/output ports onto a single chip, making them useful for embedded applications.