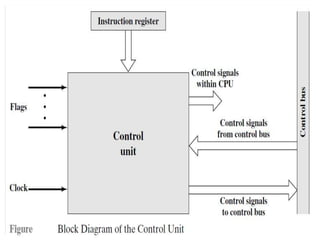
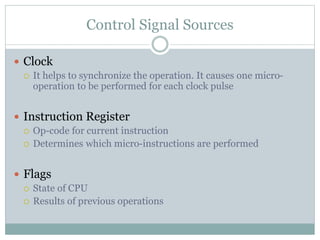
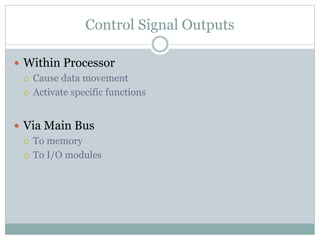
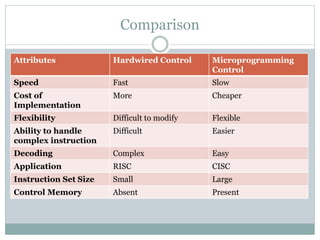
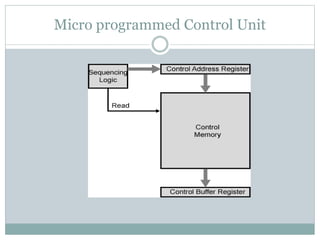
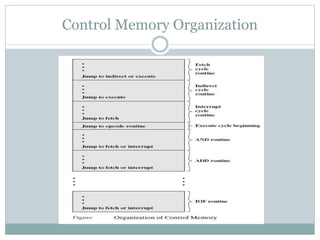
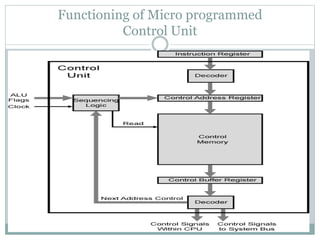
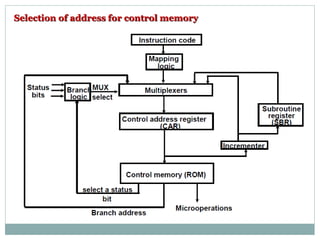
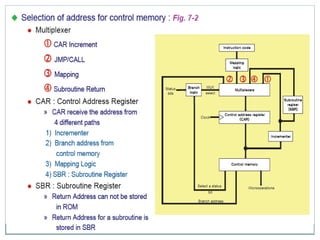
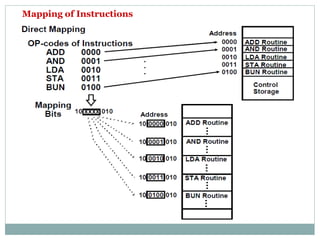
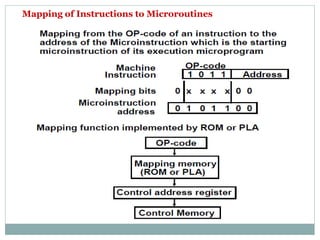
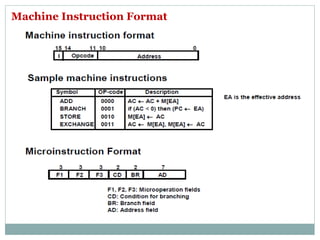
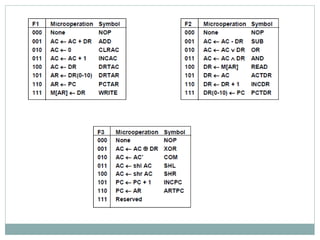
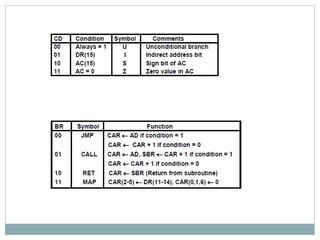
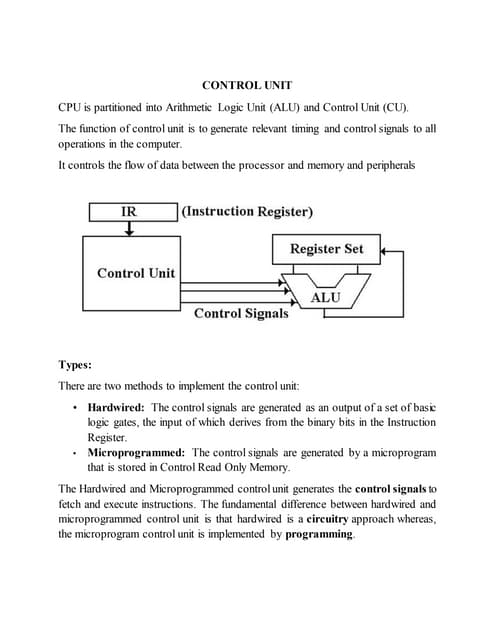
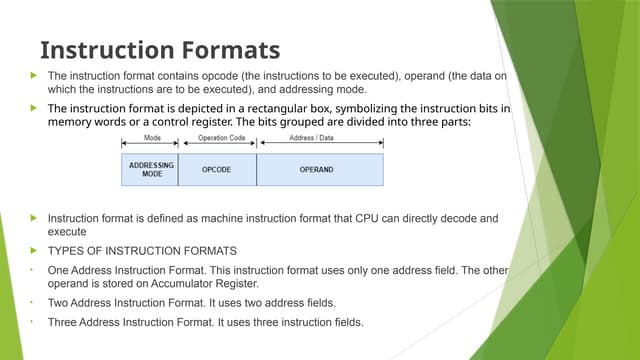
The document discusses the function and design of a Control Unit (CU) in a computer, describing its role in sequencing and executing micro-operations. It outlines two design approaches, the hardwired approach and micro-programming approach, along with their attributes such as speed, cost, flexibility, and handling of instruction sets. Additionally, it details the components and processes involved in generating control signals for various functional units within the processor.






































![2.4_Design_of_CPU_&_Types_of_Control_Unit[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/2-250318152042-1bd3979e-thumbnail.jpg?width=640&height=640&fit=bounds)