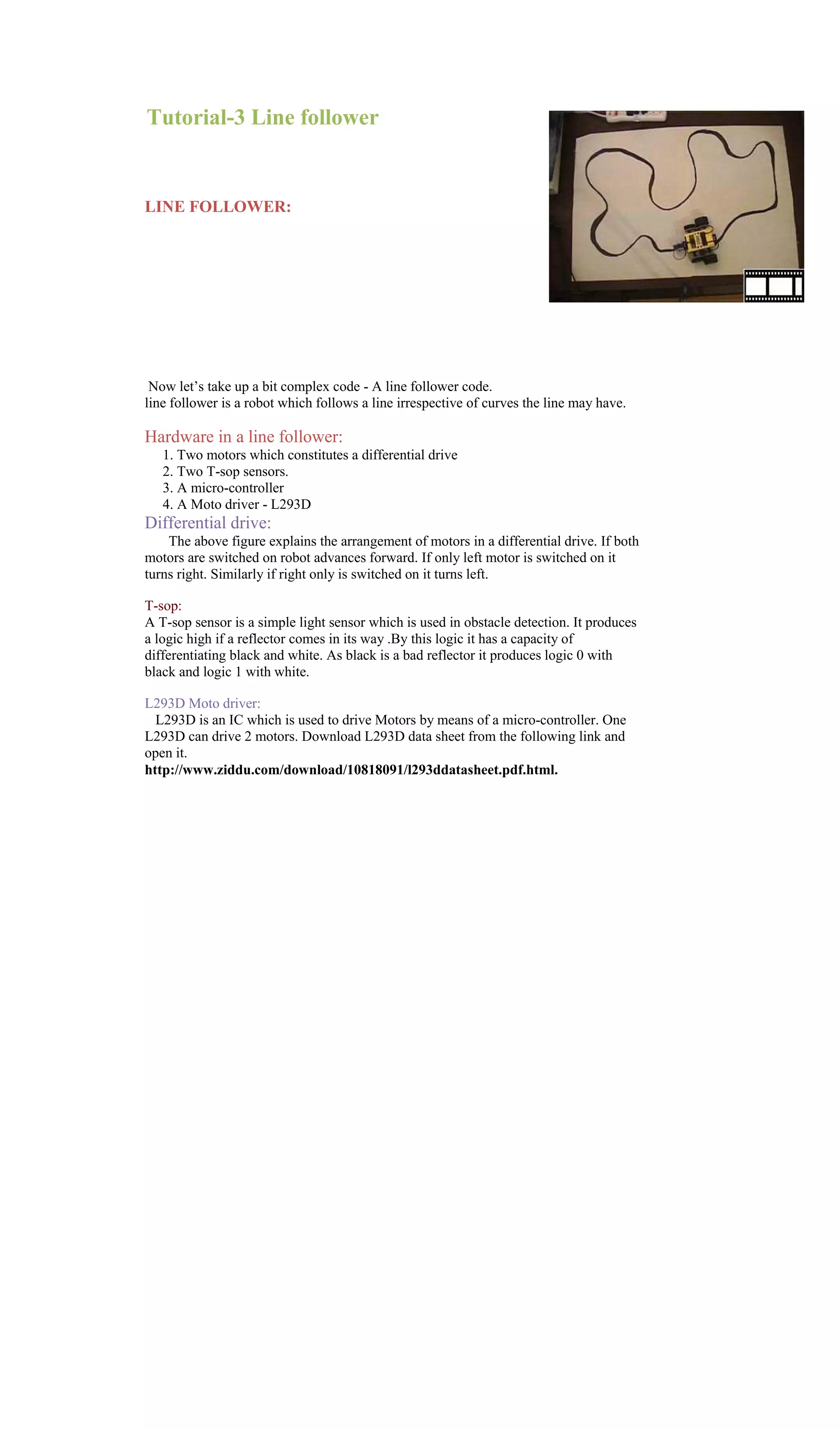
This document discusses a line follower robot that uses two motors, two light sensors, a microcontroller, and an L293D motor driver. The light sensors detect black and white surfaces to determine if the robot needs to turn in order to follow a black line. The microcontroller reads the sensor values and controls the motors via the motor driver chip to turn the robot as needed to stay on the line. The robot is able to follow lines even as they make curves by stopping or slowing one motor to cause the robot to turn in the appropriate direction.