Τι είναι;
Χαρακτηριστικά
Εγκατάσταση στο Edubot
Γυροσκόπιο
4.
Το γυροσκόπιο (GyroSensor) είναι ένας ψηφιακός
αισθητήρας που ανιχνεύει περιστροφική κίνηση σε
έναν άξονα. Μετρά την περιστροφική κίνηση του
ρομπότ και τις αλλαγές στον προσανατολισμό του.
Με αυτό τον τρόπο μπορούμε να μετρήσουμε τις
γωνίες που στρίβει το ρομπότ.
Τι είναι;
5.
Χαρακτηριστικά
Μετρά γωνίαμε ακρίβεια +/– 3 μοίρες (για
90ο γωνία).
Στην πραγματικότητα μετρά το ρυθμό
περιστροφής σε μοίρες.
Ανιχνεύει περιστροφική κίνηση σε έναν
άξονα και επιστρέφει μια τιμή που
αντιπροσωπεύει την κατεύθυνση και τον
αριθμό των μοιρών ανά δευτερόλεπτο
περιστροφής.
6.
Το γυροσκόπιομπορεί να μετρήσει μέγιστη
ταχύτητα περιστροφής 440 μοιρών ανά
δευτερόλεπτο.
Μπορεί να μετρήσει την περιστροφή του
ρομπότ, όπως φαίνεται κοιτώντας το από
πάνω αν το στερεώσουμε οριζόντια στο
ρομπότ.
Χαρακτηριστικά
7.
Αν τορομπότ στρίψει δεξιά, επιστρέφει
θετικό αριθμό, ενώ αν στρίψει αριστερά,
επιστρέφει έναν αρνητικό.
Δεν μετράει την περιστροφή των
κινητήρων.
Χαρακτηριστικά
8.
Το γυροσκόπιοβαθμονομείται (calibration)
όταν ενεργοποιείται το brick ή όταν
συνδέεται το καλώδιο του brick.
Αν το ρομπότ κινείται κατά το παραπάνω
στάδιο το γυροσκόπιο «αντιλαμβάνεται»
λανθασμένα ότι είναι ακίνητο (drift).
Χαρακτηριστικά
9.
Χαρακτηριστικά
Η ανάγνωσητων τιμών του γυροσκοπίου
προξενεί κάποια χρονοκαθυστέρηση (lag).
Οι διάφορες απώλειες που μπορεί να
προκύψουν (drift, lag) δικαιολογούν την
απαίτηση για εξοικείωση και εμπειρία με
τον αισθητήρα.
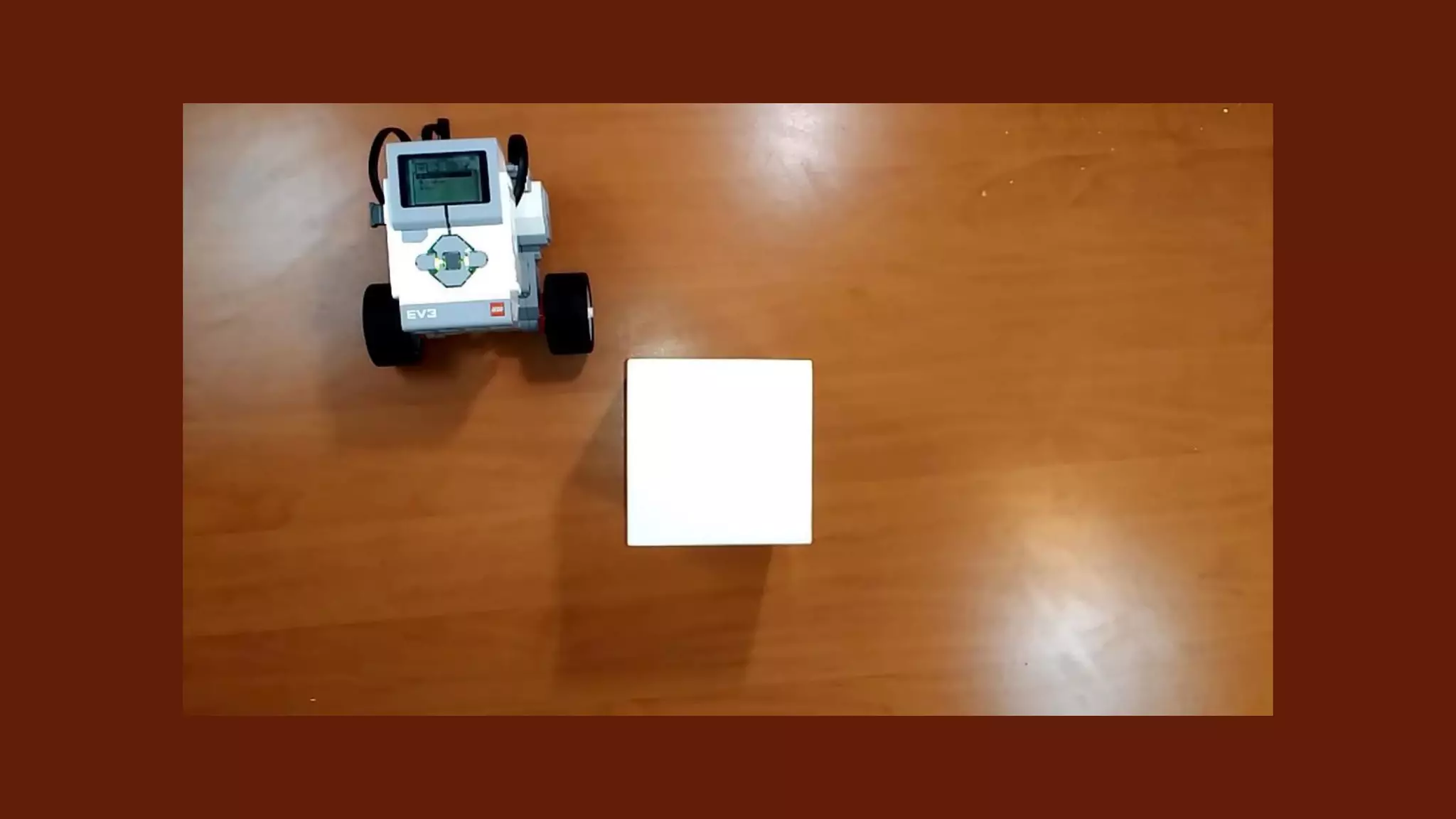
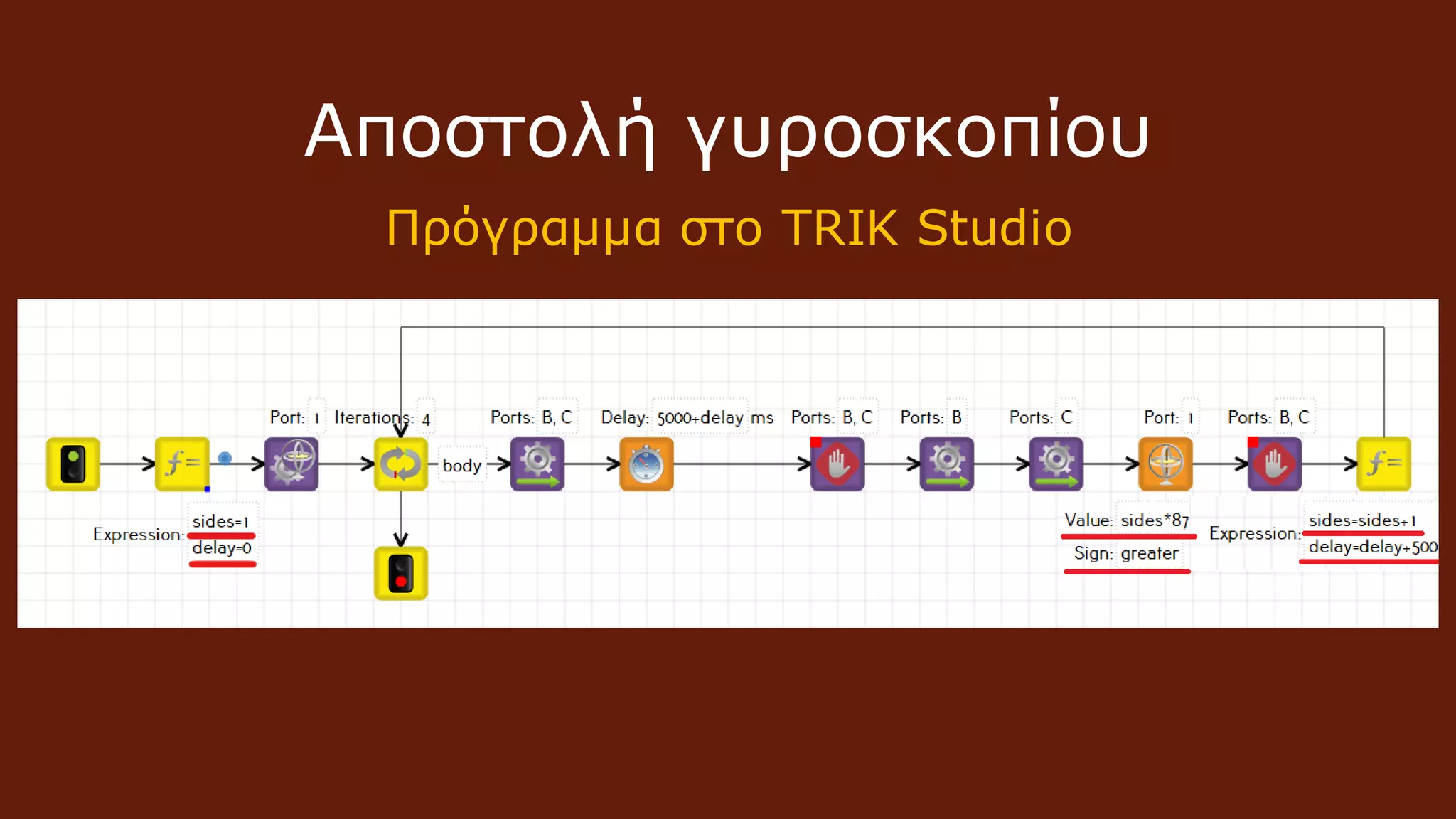
Σενάριο αποστολής
ΤοEdubot να μετακινηθεί γύρω από μια
τετράγωνη διαδρομή και να επιστρέψει στο
σημείο από όπου ξεκίνησε.
Να στρίβει με τη βοήθεια του γυροσκοπίου.
18.
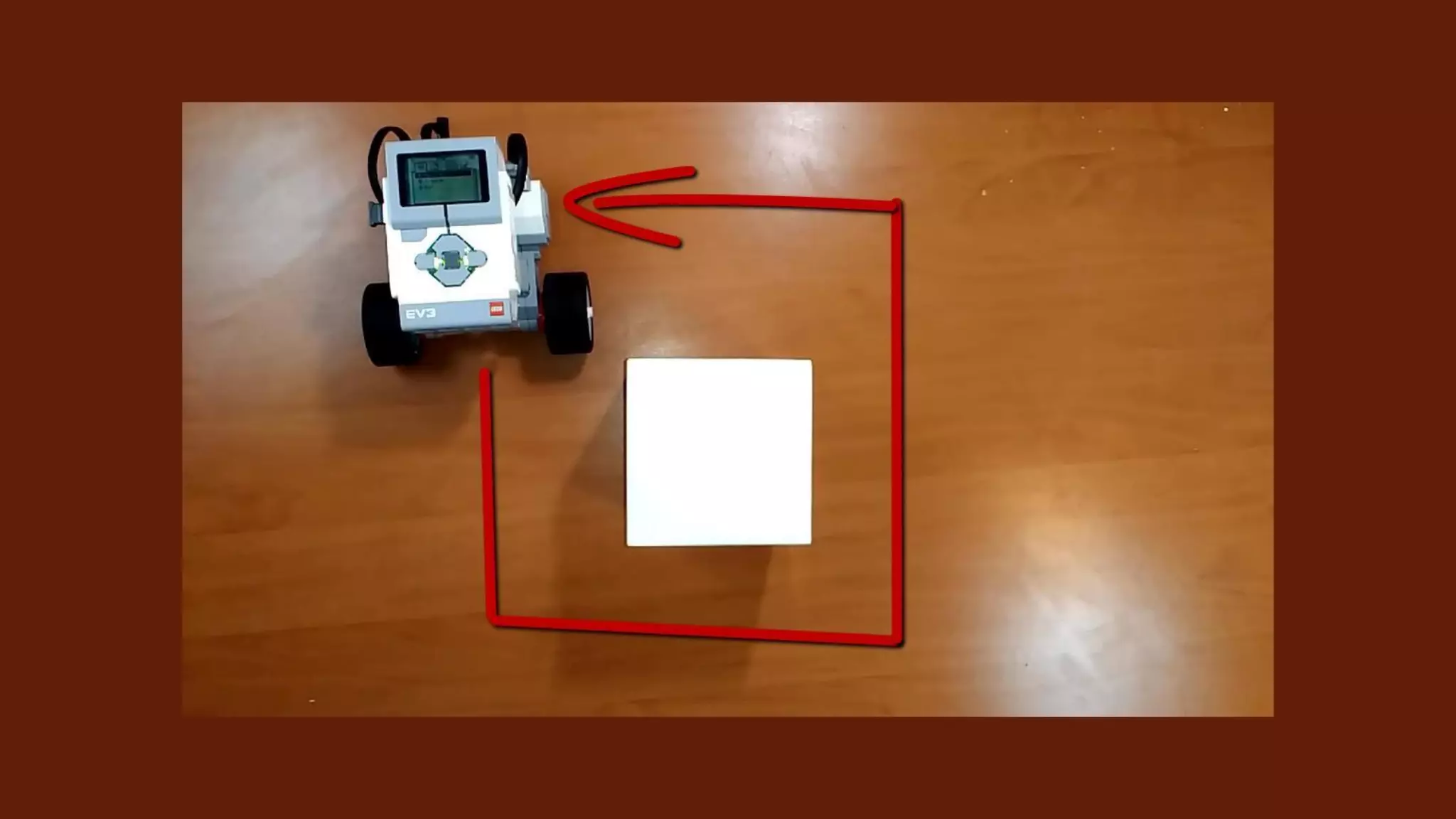
Ευθεία πορείαμέχρι την στροφή
Έχουμε στροφή 90ο
Στροφή (με spin) έως ότου το
γυροσκόπιο μετρήσει 90ο (ή λίγο
μικρότερη γωνία)
Επανάλαβε τα παραπάνω βήματα 4 φορές
Βήματα επίλυσης
19.
Η γωνίαχρειάζεται προσαρμογή -
συνήθως η τιμή πρέπει να είναι μικρότερη
από 90ο (ή από την τιμή που θέλουμε).
Οι διάφορες απώλειες (drift, lag) που
μπορεί να προκύψουν από τους
κινητήρες και το σταμάτημα της
περιστροφής μπορούν να επηρεάσουν
την ακρίβεια.
Βήματα επίλυσης