Downloaded 111 times
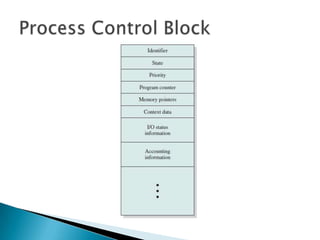
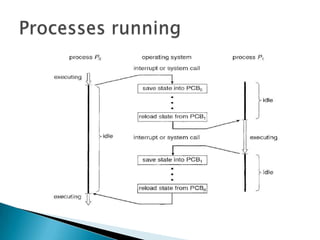
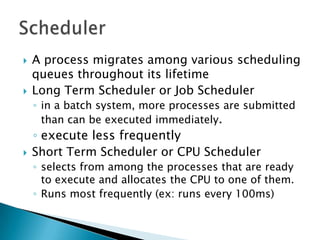
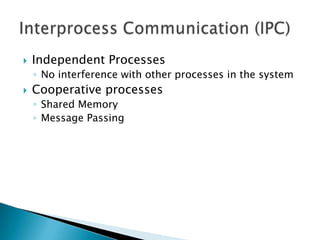
![#define BUFFER_SIZE 10
typedef struct {
…
}item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
/*
Buffer is empty when in==out
Buffer is full when ((in+1)%BUFFER_SIZE)==out
*/](https://image.slidesharecdn.com/lecture5-processconcept-120307014143-phpapp01/85/Lecture-5-process-concept-25-320.jpg)
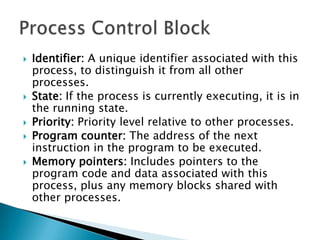
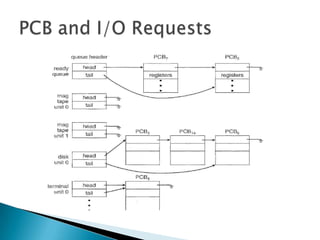
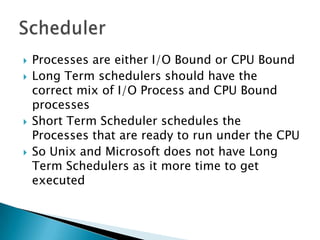
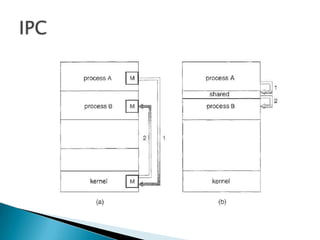
![while (true) {
/* produce an item in nextProduced *I
while ( ((in + 1) % BUFFER_SIZE) == out)
I* do nothing *I
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/lecture5-processconcept-120307014143-phpapp01/85/Lecture-5-process-concept-26-320.jpg)
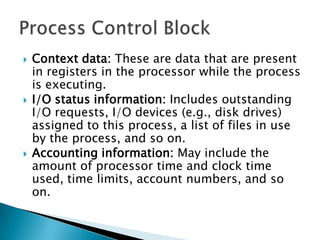
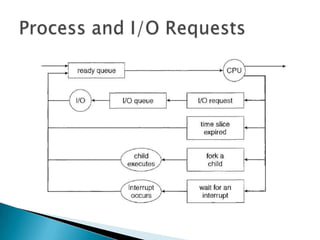
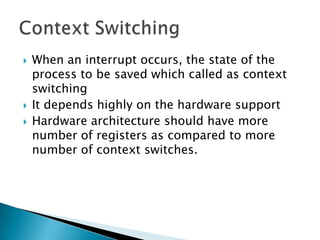
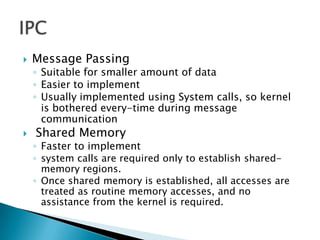
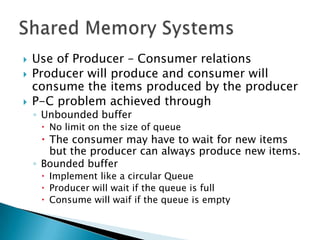
![item nextConsumed;
while (true) {
while (in == out)
; II do nothing
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
I* consume the item in nextConsumed *I
}](https://image.slidesharecdn.com/lecture5-processconcept-120307014143-phpapp01/85/Lecture-5-process-concept-27-320.jpg)

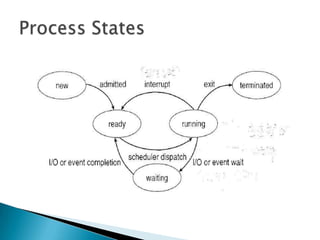
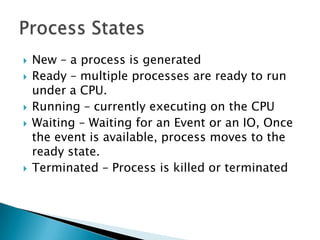
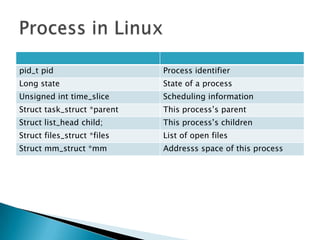
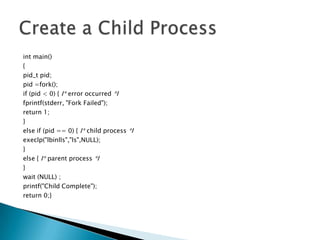
The document discusses processes in an operating system. It defines a process as an active program in execution that has its own memory space and resources. It describes the different states a process can be in like ready, running, waiting etc. It also discusses process control blocks that contain information about processes and scheduling queues that processes move between. Inter-process communication using shared memory and message passing is also summarized.