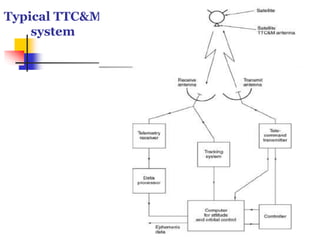
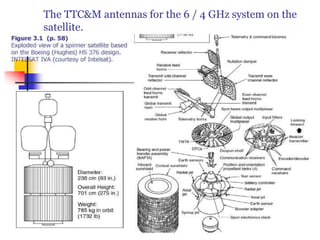
The document discusses the key subsystems of satellites, including telemetry tracking command and monitoring (TT&C), power systems, and communication subsystems. The TT&C system controls the satellite's orbit, monitors sensor data, and enables commanding. Telemetry collects sensor data and sends it to earth stations for monitoring. Tracking provides position data. The command system controls satellite operations. Power is generated by solar cells and stored in batteries. Communication payloads relay voice, video and data using transponders across multiple frequency bands based on international agreements.