Download as PDF, PPTX










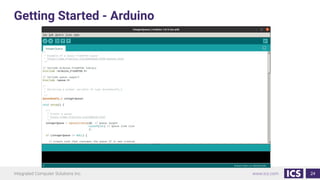
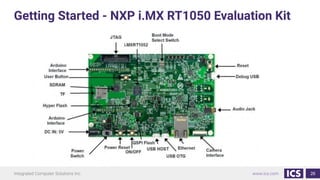
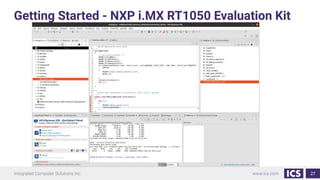





FreeRTOS is an open-source real-time operating system kernel designed for embedded devices, supporting over 35 microcontroller platforms. It is known for its small memory footprint, low overhead, and a range of features geared towards real-time task management, making it a preferred choice for applications that require reliable real-time processing. The document also discusses licensing options, key features, supported platforms, and code examples for getting started.

































![Embedded Os [Linux & Co.]](https://cdn.slidesharecdn.com/ss_thumbnails/embedded-os-linux-co-1210967191310913-8-thumbnail.jpg?width=640&height=640&fit=bounds)