Informe difusión y acceso de información
•
0 likes•525 views

Trabajo de la asignatura de DIFUSIÓN Y ACCESO A LA INFORMACIÓN EN LA INVESTIGACIÓN del Máster Universitario de Investigación en Teconologías Tndustriales y de Telecomunicación.

Recommended
More Related Content
Viewers also liked
Viewers also liked (20)
Similar to Informe difusión y acceso de información
Similar to Informe difusión y acceso de información (20)
More from Jaime Martínez Verdú
More from Jaime Martínez Verdú (10)
Recently uploaded
Recently uploaded (20)
Informe difusión y acceso de información
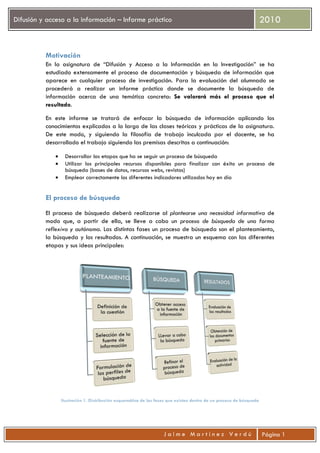
- 1. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 1 Motivación En la asignatura de “Difusión y Acceso a la Información en la Investigación” se ha estudiado extensamente el proceso de documentación y búsqueda de información que aparece en cualquier proceso de investigación. Para la evaluación del alumnado se procederá a realizar un informe práctico donde se documente la búsqueda de información acerca de una temática concreta: Se valorará más el proceso que el resultado. En este informe se tratará de enfocar la búsqueda de información aplicando los conocimientos explicados a lo largo de las clases teóricas y prácticas de la asignatura. De este modo, y siguiendo la filosofía de trabajo inculcada por el docente, se ha desarrollado el trabajo siguiendo las premisas descritas a continuación: Desarrollar las etapas que ha se seguir un proceso de búsqueda Utilizar los principales recursos disponibles para finalizar con éxito un proceso de búsqueda (bases de datos, recursos webs, revistas) Emplear correctamente los diferentes indicadores utilizados hoy en día El proceso de búsqueda El proceso de búsqueda deberá realizarse al plantearse una necesidad informativa de modo que, a partir de ella, se lleve a cabo un proceso de búsqueda de una forma reflexiva y autónoma. Las distintas fases un proceso de búsqueda son el planteamiento, la búsqueda y los resultados. A continuación, se muestra un esquema con las diferentes etapas y sus ideas principales: Ilustración 1. Distribución esquemática de las fases que existen dentro de un proceso de búsqueda
- 2. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 2 La búsqueda de información necesaria podrá realizarse a partir de una gran cantidad de bases de datos de información y motores de búsqueda disponibles en la red: BASE DE DATOS DIRECCIÓN WEB Videolectures http://videolectures.net/ SciVee http://www.scivee.tv/ TeacherTube http://www.teachertube.com/ YouTube http://www.youtube.com/?gl=ES&hl=es Slideshare http://www.slideshare.net/ WOK http://www.accesowok.fecyt.es/ Scopus http://www.scopus.com/home.url SCIENCE DIRECT http://www.sciencedirect.com/ IEEE Xplore http://ieeexplore.ieee.org/Xplore/guesthome.jsp Google Académico http://scholar.google.es/ Tabla 1. Resumen de posibles instrumentos de búsqueda ¿Qué se desea investigar? Actualmente, el alumno Jaime Martínez Verdú se encuentra en el inicio de la fase investigadora del “Máster Universitario en Investigación de Tecnologías Industriales y de Telecomunicación, MUITIT”. Este estudiante pretende desarrollar su Proyecto Final de Máster, PFM, en base a un sistema robótico orientado al mecanizado de piezas esencialmente planas de piedra natural (ver Ilustración 2). Ilustración 2. Dibujo esquemático del sistema robótico diseñado por el tecnólogo
- 3. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 3 Este sistema robótico de mecanizado diseñado se define como: 1. Un sistema robótico de estructura paralela con 3 grados de libertad que podrá ejecutar trayectorias planas 2. La estructura paralela está formada por una base fija y una plataforma móvil donde se monta la herramienta de corte 3. La base fija dispondrá de tres servomotores para generar el movimiento del sistema robótico 4. Los tres motores proporcionarán movimiento a tres piezas: eslabones activos. Cada motor proporcionará movimiento a su eslabón activo correspondiente 5. Los tres eslabones activos están unidos, a una pieza (eslabón pasivo) por cada eslabón activo, mediante sus respectivas articulaciones de revolución 6. Cada eslabón pasivo está unido a la plataforma móvil mediante su pertinente articulaciones de revolución Después de dos meses de trabajo dedicado plenamente al diseño conceptual, geométrico y cinemático (estudio del comportamiento de velocidades y aceleraciones del sistema mecánico sin tener en consideración las fuerzas y momentos que originan dicho movimiento), el investigador procede a comenzar el diseño dinámico del mismo (es decir, estudio del las fuerzas y momentos que originan el movimiento del sistema mecánico). El estudio dinámico del mismo consta de un análisis de las fuerzas y momentos que actúan durante el movimiento del mecanismo teniendo en cuenta las distribuciones másicas del sistema y sus inercias. Previamente a proceder con el estudio dinámico, al igual que se realizó antes de comenzar el análisis de la cuestión cinemática, se llevará a cabo una simulación previa del sistema para evaluar las diferentes variables que intervienen. Durante la simulación se ejecutaron varios movimientos del robot obteniendo gráficas de valores de posiciones, velocidades, aceleraciones, fuerzas y momentos, para todos los eslabones que formaban parte de la estructura del robot. El investigador consiguió descubrir que en todos los casos, debido a las fuerzas y momentos generados durante el movimiento del robot, se generaban unas fuerzas de reacción en los apoyos (ejes de rotación de los servomotores) de la estructura que ponían en peligro la integridad de los eslabones afectados (por superar el esfuerzo límite admisible) y se generaba también una vibración de traqueteo en el sistema. Para evitar este problema, el investigador intentó solucionar el problema por sí mismo empleando conceptos de Teoría de Estructuras aunque esta teoría no logró solucionar el problema. Una vez agotada la opción propia de resolución, el tecnólogo procedió a buscar en fondos documentales una posible solución al problema. A continuación, se procederá a detallar el proceso de búsqueda llevado a cabo por el investigador.
- 4. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 4 Proceso de búsqueda de información Planteamiento Definición de la cuestión: ¿Cómo es posible eliminar o minimizar las reacciones que, generadas durante el movimiento del mecanismo, aparecen en los apoyos de la estructura robótica (eje de cada servomotor)? Selección de la fuente de información: Para llevar a cabo la resolución de la cuestión planteada se ha definido como fuente de información las bases de datos de artículos y revistas de investigación (objeto de estudio de la asignatura cursada). Se emplearán como herramientas de búsqueda: o SCOPUS o IEEE Xplore o ISI Web of Knowledge o ScienceDirect Formular perfiles de búsqueda: Como materia de búsqueda se pueden seleccionar dos campos principales: ROBÓTICA y MECÁNICA. Como fuentes de información se seleccionarán tanto conferencias como revistas de investigación. Para realizar con éxito será necesario elegir diferentes combinaciones de keywords de manera que se obtengan los mejores resultados de búsqueda posibles. Algunas opciones de búsqueda son: FORMULACIÓN LAGRAGIANA ROBÓTICA PARALELA 3-RRR 3 Gdl MODELO DINÁMICO ANULACIÓN DE REACCIONES BALANCEO DE MASAS COMPENSACIÓN DE REACCIONES MOMENTOS Y FUERZAS DE TRAQUETEO O equivalentes en ingles: LAGRANGE FORMULATION PARALLEL ROBOTICS 3-RRR 3 Dof DYNAMIC MODEL REACTIONLESS MASSES BALANCE REACTIONS COMPENSATION SHAKING FORCES AND MOMENTS Búsqueda Obtener el acceso a la fuente de información: Para obtener el acceso a la fuente de información sólo basta con disponer de un ordenador con conexión a internet (en este informe, nos centraremos exclusivamente en las fuentes de información digitales). Tanto si se está empleando una dirección IP de la universidad como si esto no es posible, siempre será factible obtener información del abstract del artículo por lo que con dicha información será suficiente para ejecutar el proceso de búsqueda de información. Llevar a cabo la búsqueda: Una vez se han establecido la cuestión a investigar, se han definido las fuentes de información y se han formulado los diferentes perfiles de búsqueda, es posible llevar a cabo la operación de búsqueda accediendo a las fuentes de información. En el anexo adjunto al final del informe se detallan los diferentes procesos de búsqueda ejecutados. Generalmente se procurará emplear como primera posibilidad, la búsqueda avanzada que hay disponible en casi todos buscadores. Refinar el proceso de búsqueda: Una vez realizada la primera búsqueda es posible, más bien probable, que se necesite repetir la operación de búsqueda ajustando algunos de los parámetros de condicionamiento que ofrecen los diferentes buscadores.
- 5. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 5 Resultados Evaluación de los resultados: En cada una de las búsquedas realizadas se llevará a cabo una evaluación de los resultados obtenidos una vez se haya disminuido suficientemente la cantidad de artículos listados en el buscador o base de datos. El proceso de evaluación se llevará a cabo mediante la lectura del abstract (por motivos de agilizar el proceso de lectura para eliminación de falsos positivos y también porque, en ocasiones, no existe acceso al artículo por parte de la universidad o no se dispone de VPN o conexión en la universidad). Una vez se han leído los resultados procedentes del refinado es posible determinar realmente qué artículos pueden ser útiles para definir una solución a la problemática planteada. Obtención de los documentos primarios: Los documentos obtenidos, ordenados cronológicamente, son los siguientes: Reducing Base Reactions With Gyroscopic Actuation of Space-Robotic Systems. Carpenter, M.D., Peck, M.A., 2009 Robotics, IEEE Transactions on 25, Issue: 6 , pp. 1262 – 1270 Design of planar 3-DOF 3-RRR reactionless parallel manipulators. V.H. Arakelian, M.R. Smith. December 2008 Mechatronics, Volume 18, Issue 10, pp. 601-606 On the design of reactionless 3-DOF planar parallel mechanisms. Abbas Fattah, Sunil K. Agrawal. January 2006 Mechanism and Machine Theory, Volume 41, Issue 1, pp. 70-82 Design of reactionless 3-DOF and 6-DOF parallel manipulators using parallelepiped mechanisms. Wu, Y., Gosselin, C. 2005 IEEE Transactions on Robotics 21 (5), pp. 821-833 7 Synthesis and design of reactionless three-degree-of-freedom parallel mechanisms. Gosselin, C.M., Vollmer, F., Côté, G., Wu, Y. 2004 IEEE Transactions on Robotics and Automation 20 (2), pp. 191-199 21 Synthesis, design, and prototyping of a planar three degree-of-freedom reactionless parallel mechanism. Foucault, S., Gosselin, C.M. 2004 Journal of Mechanical Design, Transactions of the ASME 126 (6), pp. 992-999 9 Reactionless space and ground robots: novel designs and concept studies. Sunil K. Agrawal, Abbas Fattah. January 2004 Mechanism and Machine Theory 39 (1), pp. 25-40 On the development of a planar 3-DOF reactionless parallel mechanism. Foucault, S., Gosselin, C.M. 2002 Proceedings of the ASME Design Engineering Technical Conference 5 B, pp. 985- 993 2 Complete shaking force and shaking moment balancing of planar parallel manipulators with prismatic pairs. Briot, S, Bonev, IA, Gosselin, CM, et al. 2009 Proceedings of the institution of mechanical engineers 223 (1) pp. 43-52 On the dynamic balancing of multi-DOF parallel mechanisms with multiple legs. Wu, YN, Gosselin, C.M. February 2007 Journal of Mechanical Design 129 (2) pp. 234-238 Synthesis of reactionless spatial 3-DoF and 6-DoF mechanisms without separate counter- rotations. Wu, YN, Gosselin, C.M. June 2004 International Journal of Robotics and Research 23 (6) pp.625-642
- 6. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 6 Evaluación de la actividad: Una vez leídos todos los documentos se pudo afirmar que los resultados de la búsqueda fueron satisfactorios puesto que se aprendieron diversos métodos para resolver la aparición de reacciones en los apoyos del sistema robótico. Se decidió llevar a cabo un diseño mostrado en la Ilustración 3 capaz de hacer desaparecer, por compensación de los centros de masas, las reacciones en los apoyos de la estructura del sistema robótico. Ilustración 3. Prototipo diseñado por el tecnólogo en base a la información procedente de la búsqueda
- 7. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 7 ANEXO DE BÚSQUEDA DE INFORMACIÓN A lo largo de este anexo se procederá a realizar la búsqueda de la documentación relacionada con la cuestión planteada. SCOPUS 1. Primeramente se accede a la página oficial de búsqueda de SCOPUS: http://www.scopus.com/home.url 2. Después de buscar con diversas palabras claves como parallel robot, dynamic model, 3-Dof,… no se obtienen resultados del todo satisfactorios. Por ello se empiezan a obtener combinaciones de los mismos como parallel 3-Dof, reactionless parallel, reactionless balancing,… obteniendo mejores resultados… 3. Veamos como ejemplo que, una vez realizada una búsqueda con la palabra clave REACTIONLESS, se tiene la siguiente pantalla con un total de 87 resultados de búsqueda: 4. Puesto que es necesario refinar la búsqueda se propone modificar y ajustar ciertos parámetros que permite el sistema SCOPUS: De la opción Source Title se excluye la alternativa Proceedings of SPIE the International Society for Optical Engineering. En el campo Subject Area, excluimos el acceso a: Physics and Astronomy, Computer Science, Medicine y Chemical Engineering. 5. Tras esta primera etapa de refinado se obtiene como resultado un total de 57 artículos. Todavía se obtiene gran cantidad de artículos por lo que se pretende volver a refinar: De la opción Source Title se excluye Acta Astronautica. En el campo Subject Area, excluimos el acceso a: Earth and Planetary Sciences, Chemistry, Mathematics y Biochemistry, Genetics and Molecular Biology.
- 8. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 8 6. Tras este segundo paso de refinado se han obtenido un total de 44 artículos. A continuación se restringe la búsqueda a los tres autores más repetidos en la búsqueda: Gosselin C.M., Yoshida K. y Agrawal S.K. Una vez realizada la limitación a estos tres autores descubrimos que Yoshida está más orientado al control del sistema más que a la mecánica del mismo, por lo que lo eliminamos también alcanzando un total de 22 artículos. 7. Finalmente, procedemos a ordenar los artículos por número de veces citado el artículo y se obtiene el siguiente resultado de la búsqueda: 8. Una vez obtenido la lista definitiva, se procede a leer todos los abstracts llegando a seleccionar un total de 4 artículos que podía servir como solución a la cuestión planteada: Synthesis and design of reactionless three-degree-of-freedom parallel mechanisms Gosselin, C.M., Vollmer, F., Côté, G., Wu, Y. 2004 IEEE Transactions on Robotics and Automation20 (2), pp. 191-199 21 Synthesis, design, and prototyping of a planar three degree-of- freedom reactionless parallel mechanism Hide Abstract Foucault, S., Gosselin, C.M. 2004 Journal of Mechanical Design, Transactions of the ASME 126 (6), pp. 992-999 9 Design of reactionless 3-DOF and 6-DOF parallel manipulators using parallelepiped mechanisms Hide Abstract Wu, Y., Gosselin, C. 2005 IEEE Transactions on Robotics 21 (5), pp. 821-833 7 On the development of a planar 3-DOF reactionless parallel mechanism Foucault, S., Gosselin, C.M. 2002 Proceedings of the ASME Design Engineering Technical Conference 5 B, pp. 985-993 2
- 9. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 9 IEEE Xplore 1. Se accede a la página web habilitada para el buscador: http://ieeexplore.ieee.org/Xplore/guesthome.jsp 2. Una vez dentro de la web, se accede a la sección de Journals & Magazines. 3. Se teclea en la barra de escritura avanzada una palabra clave o combinación de ellas como por ejemplo, robótica paralela, manipulador paralelo, formulación lagragiana o modelo dinámico. Ninguna de estas palabras clave dan resultados suficientemente satisfactorios. 4. Se procede a emplear el resto de palabras clave. De todas las posibles palabras clave se ha obtenido como la más fructífera (mayor cantidad de artículos relacionados con el problema) la de: reactionless. 5. En la primera criba se obtienen artículos, en primera y segunda línea, tales como: Synthesis and design of reactionless three-degree-of-freedom parallel mechanisms Gosselin, C.M.; Vollmer, F.; Cote, G.; Yangnian Wu; Robotics and Automation, IEEE Transactions on Volume: 20 , Issue: 2 Digital Object Identifier: 10.1109/TRA.2004.824696 Publication Year: 2004 , Page(s): 191 - 199 Design of reactionless 3-DOF and 6-DOF parallel manipulators using parallelepiped mechanisms Yangnian Wu; Gosselin, C.; Robotics, IEEE Transactions on Volume: 21 , Issue: 5 Digital Object Identifier: 10.1109/TRO.2005.847573 Publication Year: 2005 , Page(s): 821 - 833 6. Se puede observar que la mayoría de resultados que aparecen en la búsqueda de este buscador se asemejan en gran medida con los artículos localizados empleando SCOPUS. En esta ocasión no aparecen casi autores relevantes como ocurría en el caso anterior con: Gosselin C.M., Yoshida K. y Agrawal S.K. Por eso se decide acotar la búsqueda de diferente manera que en el proceso de búsqueda anterior. 7. Posteriormente, para refinar la búsqueda se emplean las herramientas que incorpora el sistema tales como el campo subject donde se coloca Robotics & Control Systems y Journals aparece cómo tercera opción: Reducing Base Reactions With Gyroscopic Actuation of Space- Robotic Systems Carpenter, M.D.; Peck, M.A.; Robotics, IEEE Transactions on Volume: 25 , Issue: 6 Digital Object Identifier: 10.1109/TRO.2009.2032953 Publication Year: 2009 , Page(s): 1262 - 1270 8. Posteriormente, para refinar la búsqueda se emplean las herramientas que incorpora el sistema tales como subject donde se coloca Subject: Robotics & Control Systems y Conferences no aparecen artículos “bien” relacionados con el problema. 9. Puesto que el investigador se ha percatado de la repetición de uno de los propietarios de los artículos se decide hacer una búsqueda por Gosselin. No se encuentra mejoría en los resultados. 10. Como conclusión, podemos decir que se han obtenido tres artículos que pueden ofrecer una alternativa de solución a la problemática planteada.
- 10. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 10 ISI Web of Knowledge 1. Primeramente se accede a la página oficial de búsqueda de SCOPUS: http://www.accesowok.fecyt.es/ 2. Después de buscar con diversas palabras claves como parallel robot, dynamic model, 3-Dof,… no se obtienen resultados del todo satisfactorios. Por ello se empiezan a obtener combinaciones de los mismos como parallel 3-Dof, reactionless parallel, reactionless balancing,… obteniendo mejores resultados… 3. Veamos como ejemplo que, una vez realizada una búsqueda combinando los términos REACTIONLESS + 3-DOF (una vez realizada una búsqueda con REACTIONLESS se procede a refinar los resultados con Search within results for), se tiene la siguiente pantalla con un total de 9 artículos: 4. No es necesario seguir refinando puesto que, además de artículos descartados, existen repeticiones con respecto a otras búsquedas. Si eliminamos estos artículos repetidos tenemos la siguiente lista: Complete Shaking Force and Shaking Moment Balancing of the Position-Orientation Decoupled PAMINSA Manipulator Author(s): Briot, S; Arakelian, V Conference Information: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Date: JUL 14- 17, 2009 Singapore SINGAPORE Source: 2009 IEEE/ASME INTERNATIONAL CONFERENCE ON ADVANCED INTELLIGENT MECHATRONICS, VOLS 1-3 Pages: 1514-1519 Published: 2009 Times Cited: 0 Complete shaking force and shaking moment balancing of planar parallel manipulators with prismatic pairs Author(s): Briot, S; Bonev, IA; Gosselin, CM, et al. Source: PROCEEDINGS OF THE INSTITUTION OF MECHANICAL ENGINEERS PART K-JOURNAL OF MULTI-BODY DYNAMICS Volume: 223 Issue: 1 Pages: 43-52 Published: 2009 Times Cited: 0 On the dynamic balancing of multi-DOF parallel mechanisms with multiple legs Author(s): Wu, YN; Gosselin, CM Source: JOURNAL OF MECHANICAL DESIGN Volume: 129 Issue: 2Pages: 234-238 Published: FEB 2007 Times Cited: 7 Synthesis of reactionless spatial 3-DoF and 6-DoF mechanisms without separate counter-rotations Author(s): Wu, YN; Gosselin, CM Source: INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH Volume: 23 Issue: 6 Pages: 625-642 Published: JUN 2004 Times Cited: 6
- 11. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 11 5. Una vez obtenido la lista definitiva, se procede a leer todos los abstracts llegando a seleccionar un total de 3 artículos que podía servir como solución a la cuestión planteada: Complete shaking force and shaking moment balancing of planar parallel manipulators with prismatic pairs Author(s): Briot, S; Bonev, IA; Gosselin, CM, et al. Source: PROCEEDINGS OF THE INSTITUTION OF MECHANICAL ENGINEERS PART K-JOURNAL OF MULTI-BODY DYNAMICS Volume: 223 Issue: 1 Pages: 43-52 Published: 2009 Times Cited: 0 On the dynamic balancing of multi-DOF parallel mechanisms with multiple legs Author(s): Wu, YN; Gosselin, CM Source: JOURNAL OF MECHANICAL DESIGN Volume: 129 Issue: 2Pages: 234-238 Published: FEB 2007 Times Cited: 7 Synthesis of reactionless spatial 3-DoF and 6-DoF mechanisms without separate counter-rotations Author(s): Wu, YN; Gosselin, CM Source: INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH Volume: 23 Issue: 6 Pages: 625-642 Published: JUN 2004 Times Cited: 6
- 12. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 12 Science Direct 1. Primeramente se accede a la página oficial de búsqueda de SCOPUS: http://www.sciencedirect.com 2. Después de buscar con diversas palabras claves como parallel robot, dynamic model, 3-Dof,… no se obtienen resultados del todo satisfactorios. Por ello se empiezan a obtener combinaciones de los mismos como parallel 3-Dof, reactionless parallel, reactionless balancing,… obteniendo mejores resultados… 3. Veamos como ejemplo que, una vez realizada una búsqueda avanzada combinando los términos REACTIONLESS + 3-DOF, se tiene la siguiente pantalla con un total de 13 artículos (un número, para ser la primera fase de la búsqueda, muy bajo): 4. Puesto que es necesario refinar la búsqueda se propone modificar y ajustar ciertos parámetros que permite el sistema ScienceDirect: De la opción Journal/Book Title se excluye la alternativa Acta Astronautica, Journal of Sound and Vibration, Journal of Symbolic Computation y Mechatronics, eliminando así 5 artículos. 5. Tras esta primera etapa de refinado se obtiene como resultado un total de 8 artículos. No obstante, existen artículos que ya han sido encontrados en otras búsquedas empelando SCOPUS o IEE Xplore por lo que se deciden obviar éstos artículos en cuestión. 6. Este ya es un número suficientemente bajo como para realizar un sondeo leyendo los abstracts.
- 13. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 13 7. Una vez obtenido la lista definitiva, se procede a leer todos los abstracts llegando a seleccionar un total de 3 artículos que podía servir como solución a la cuestión planteada: On the design of reactionless 3-DOF planar parallel mechanisms Mechanism and Machine Theory, Volume 41, Issue 1, January 2006, Pages 70-82 Abbas Fattah, Sunil K. Agrawal Design of planar 3-DOF 3-RRR reactionless parallel manipulators Mechatronics, Volume 18, Issue 10, December 2008, Pages 601-606 V.H. Arakelian, M.R. Smith Reactionless space and ground robots: novel designs and concept studies Mechanism and Machine Theory, Volume 39, Issue 1, January 2004, Pages 25-40 Sunil K. Agrawal, Abbas Fattah
- 14. Difusión y acceso a la información – Informe práctico 2010 J a i m e M a r t í n e z V e r d ú Página 14 Google Académico En esta herramienta de búsqueda, al emplear la palabra clave reactionless junto con 3-DOF es la que mejores resultados da de todas las posibilidades. No obstante, se obtiene resultados más pobres y menos controlados que empleando otros buscadores como, por ejemplo, SCOPUS o ScienceDirect.