Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
FW
Uploaded by
Fumiya Watanabe
PDF, PPTX
5,331 views
Ensemble Kalman Filterを用いたカオス力学系の推定
東工大ロボット技術研究会 第5回rogyゼミで発表した内容です.
Technology
◦
Read more
6
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 11
2
/ 11
3
/ 11
4
/ 11
5
/ 11
6
/ 11
7
/ 11
8
/ 11
9
/ 11
10
/ 11
11
/ 11
More Related Content
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
PDF
20090924 姿勢推定と回転行列
by
Toru Tamaki
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
PPTX
How Much Position Information Do Convolutional Neural Networks Encode?
by
Kazuyuki Miyazawa
PDF
Active Learning 入門
by
Shuyo Nakatani
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
PDF
一般向けのDeep Learning
by
Preferred Networks
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
20090924 姿勢推定と回転行列
by
Toru Tamaki
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
How Much Position Information Do Convolutional Neural Networks Encode?
by
Kazuyuki Miyazawa
Active Learning 入門
by
Shuyo Nakatani
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
一般向けのDeep Learning
by
Preferred Networks
What's hot
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PDF
正準相関分析
by
Akisato Kimura
PDF
LBFGSの実装
by
Kotaro Tanahashi
PPTX
ベイズ統計学の概論的紹介
by
Naoki Hayashi
PDF
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning
by
Preferred Networks
PDF
[DL輪読会]近年のエネルギーベースモデルの進展
by
Deep Learning JP
PDF
行列およびテンソルデータに対する機械学習(数理助教の会 2011/11/28)
by
ryotat
PPTX
Active Convolution, Deformable Convolution ―形状・スケールを学習可能なConvolution―
by
Yosuke Shinya
PDF
PRML輪読#13
by
matsuolab
PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
PDF
【メタサーベイ】Neural Fields
by
cvpaper. challenge
PDF
Fisher Vectorによる画像認識
by
Takao Yamanaka
PDF
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
PDF
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
PDF
[DL輪読会]Deep Learning 第2章 線形代数
by
Deep Learning JP
PDF
関数データ解析の概要とその方法
by
Hidetoshi Matsui
PDF
【DL輪読会】StyleCLIP: Text-Driven Manipulation of StyleGAN Imagery
by
Deep Learning JP
PDF
アンサンブル木モデル解釈のためのモデル簡略化法
by
Satoshi Hara
PPTX
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
PDF
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
SLAM開発における課題と対策の一例の紹介
by
miyanegi
正準相関分析
by
Akisato Kimura
LBFGSの実装
by
Kotaro Tanahashi
ベイズ統計学の概論的紹介
by
Naoki Hayashi
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning
by
Preferred Networks
[DL輪読会]近年のエネルギーベースモデルの進展
by
Deep Learning JP
行列およびテンソルデータに対する機械学習(数理助教の会 2011/11/28)
by
ryotat
Active Convolution, Deformable Convolution ―形状・スケールを学習可能なConvolution―
by
Yosuke Shinya
PRML輪読#13
by
matsuolab
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
【メタサーベイ】Neural Fields
by
cvpaper. challenge
Fisher Vectorによる画像認識
by
Takao Yamanaka
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
[DL輪読会]Deep Learning 第2章 線形代数
by
Deep Learning JP
関数データ解析の概要とその方法
by
Hidetoshi Matsui
【DL輪読会】StyleCLIP: Text-Driven Manipulation of StyleGAN Imagery
by
Deep Learning JP
アンサンブル木モデル解釈のためのモデル簡略化法
by
Satoshi Hara
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
Viewers also liked
PPTX
パズルゲーム用ステージの自動生成
by
yskcon
PPTX
技名の考え方
by
Mahato Endo
PDF
151025kawarobo susume 04
by
武帝 太祖
PDF
151025kawarobo susume 01
by
武帝 太祖
PDF
151025kawarobo susume 03
by
武帝 太祖
PPTX
ドキ♡ドキ †テクスチャ† 講習会
by
Linea319
PPTX
情報統計力学のすすめ
by
Naoki Hayashi
PPTX
ぼくのつくったこうだいさいてんじぶつ
by
Naoki Hayashi
PPT
Rogyゼミ2014 10
by
Naoki Hayashi
PPTX
Rogyzemi temp
by
akatetsu
PPTX
rogysemi7th
by
shitaro 2012
PPTX
Rogyゼミ7thスライドpublic
by
Naoki Hayashi
PDF
151025kawarobo susume 02
by
武帝 太祖
PPTX
Rogyゼミスライド6th
by
Naoki Hayashi
PPTX
Rogyzemi
by
Naoki Hayashi
PPTX
2014年の制作物報告
by
uu ymd
PDF
Rogy目覚まし(仮)+おまけ
by
Naoki Hayashi
PDF
小さくて賢いロボット『マイクロマウス』を作ろう!
by
Teng Tokoro
PDF
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
ODP
Unityは神,Unrealは現実
by
Linea319
パズルゲーム用ステージの自動生成
by
yskcon
技名の考え方
by
Mahato Endo
151025kawarobo susume 04
by
武帝 太祖
151025kawarobo susume 01
by
武帝 太祖
151025kawarobo susume 03
by
武帝 太祖
ドキ♡ドキ †テクスチャ† 講習会
by
Linea319
情報統計力学のすすめ
by
Naoki Hayashi
ぼくのつくったこうだいさいてんじぶつ
by
Naoki Hayashi
Rogyゼミ2014 10
by
Naoki Hayashi
Rogyzemi temp
by
akatetsu
rogysemi7th
by
shitaro 2012
Rogyゼミ7thスライドpublic
by
Naoki Hayashi
151025kawarobo susume 02
by
武帝 太祖
Rogyゼミスライド6th
by
Naoki Hayashi
Rogyzemi
by
Naoki Hayashi
2014年の制作物報告
by
uu ymd
Rogy目覚まし(仮)+おまけ
by
Naoki Hayashi
小さくて賢いロボット『マイクロマウス』を作ろう!
by
Teng Tokoro
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
Unityは神,Unrealは現実
by
Linea319
Similar to Ensemble Kalman Filterを用いたカオス力学系の推定
PDF
線形カルマンフィルタの導出
by
Fumiya Watanabe
PDF
Data assim r
by
Xiangze
PPTX
カルマンフィルタ入門
by
Yasunori Nihei
PDF
Variational Kalman Filter
by
Yoshiaki Sakakura
PDF
Gunosy2015 07-07
by
Yuta Kashino
PDF
確率的自己位置推定
by
Horiguchi Shuhei
PDF
観測雑音に双曲線正割分布を用いた上界最小化に基づくカルマンフィルタ
by
Hiroki_Tanji
PDF
Infomation geometry(overview)
by
Yoshitake Misaki
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
PDF
Bishop prml 11.5-11.6_wk77_100606-1152(発表に使った資料)
by
Wataru Kishimoto
線形カルマンフィルタの導出
by
Fumiya Watanabe
Data assim r
by
Xiangze
カルマンフィルタ入門
by
Yasunori Nihei
Variational Kalman Filter
by
Yoshiaki Sakakura
Gunosy2015 07-07
by
Yuta Kashino
確率的自己位置推定
by
Horiguchi Shuhei
観測雑音に双曲線正割分布を用いた上界最小化に基づくカルマンフィルタ
by
Hiroki_Tanji
Infomation geometry(overview)
by
Yoshitake Misaki
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
Bishop prml 11.5-11.6_wk77_100606-1152(発表に使った資料)
by
Wataru Kishimoto
Recently uploaded
PPTX
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
Ensemble Kalman Filterを用いたカオス力学系の推定
1.
Ensemble Kalman Filter
を利用した カオス力学系の推定
2.
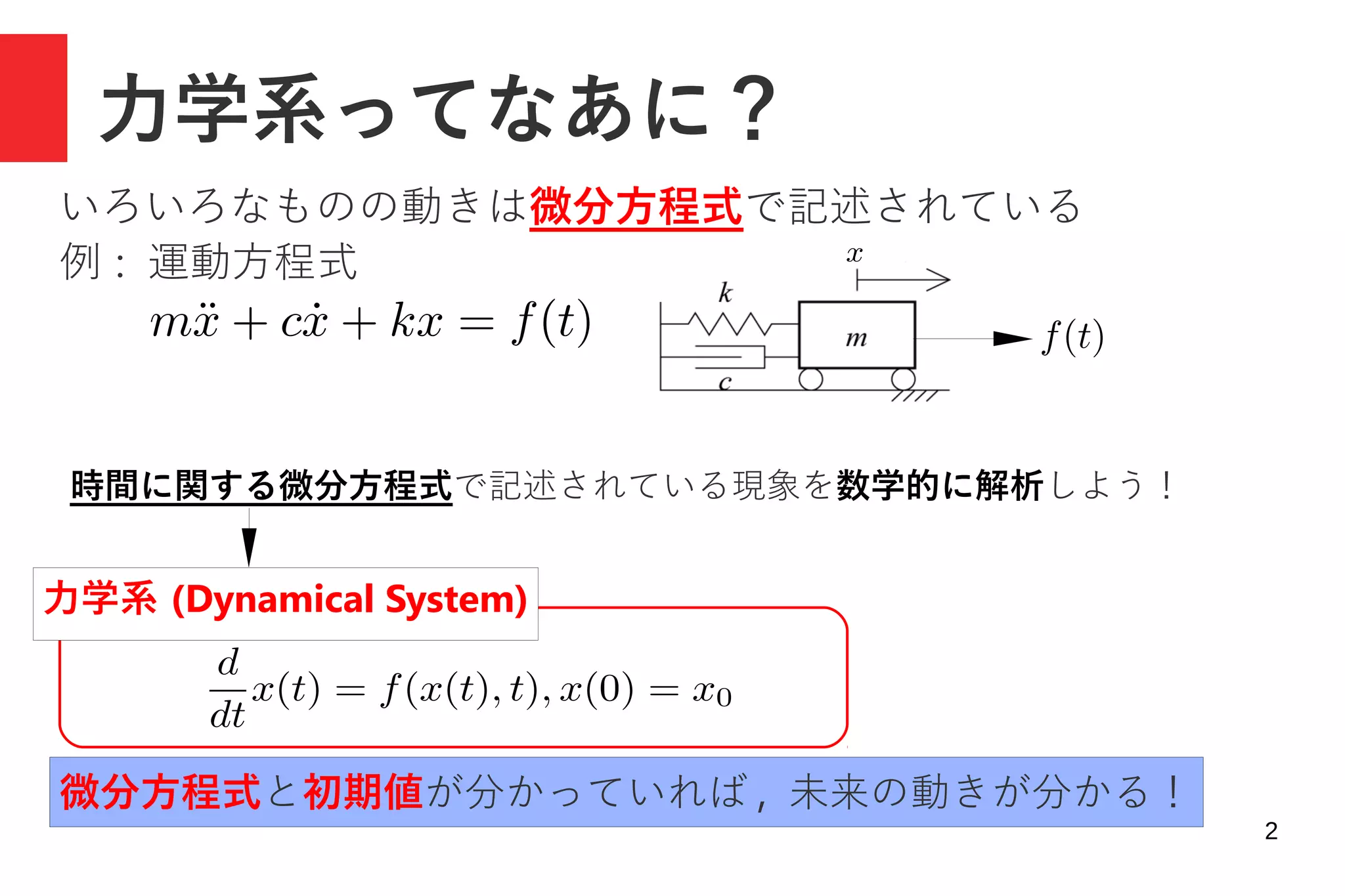
2 力学系ってなあに? いろいろなものの動きは微分方程式で記述されている 例 : 運動方程式 時間に関する微分方程式で記述されている現象を数学的に解析しよう! 力学系
(Dynamical System) 微分方程式と初期値が分かっていれば , 未来の動きが分かる!
3.
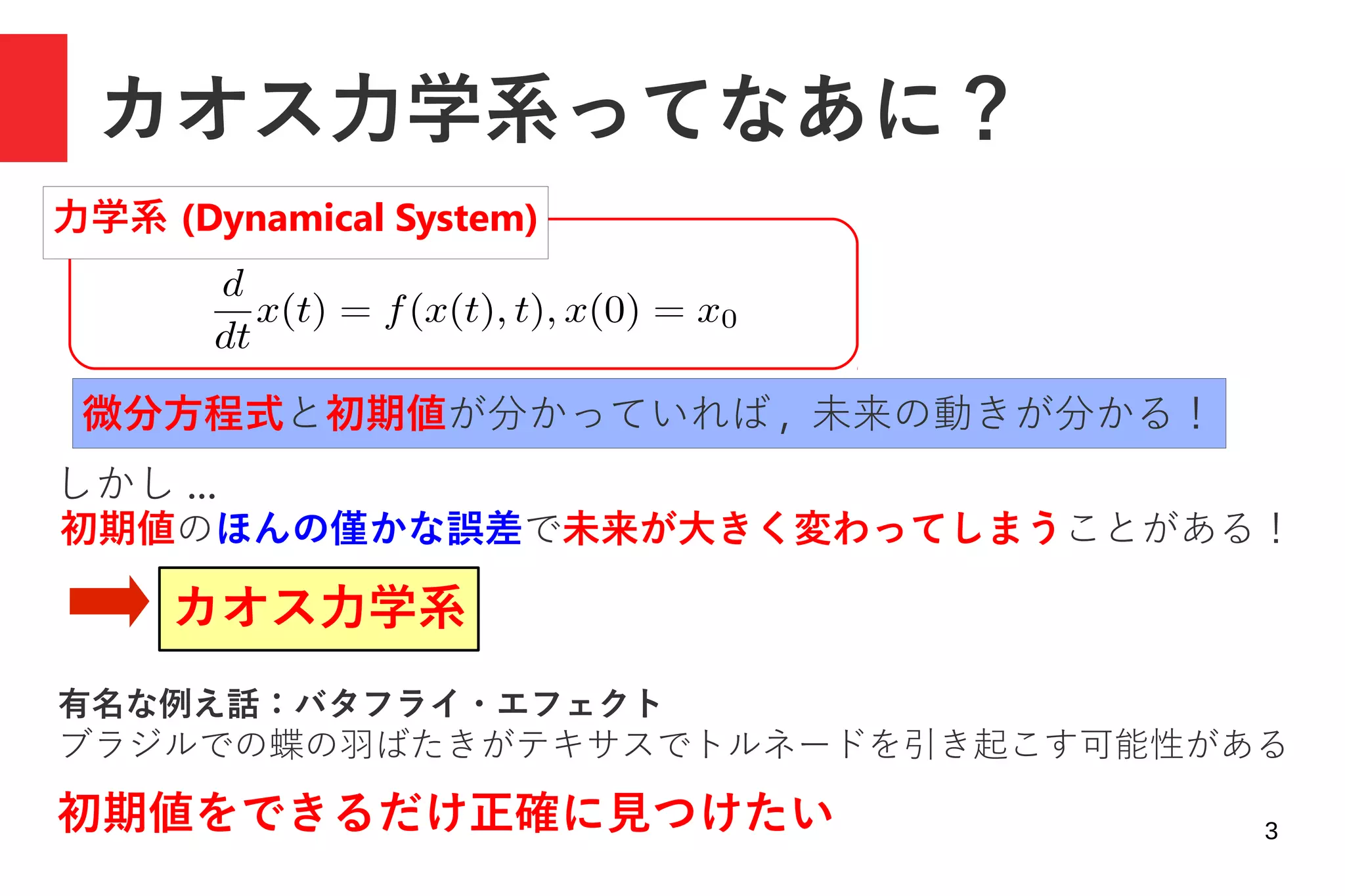
3 カオス力学系ってなあに? しかし ... 初期値のほんの僅かな誤差で未来が大きく変わってしまうことがある! カオス力学系 有名な例え話:バタフライ・エフェクト ブラジルでの蝶の羽ばたきがテキサスでトルネードを引き起こす可能性がある 初期値をできるだけ正確に見つけたい 力学系 (Dynamical
System) 微分方程式と初期値が分かっていれば , 未来の動きが分かる!
4.
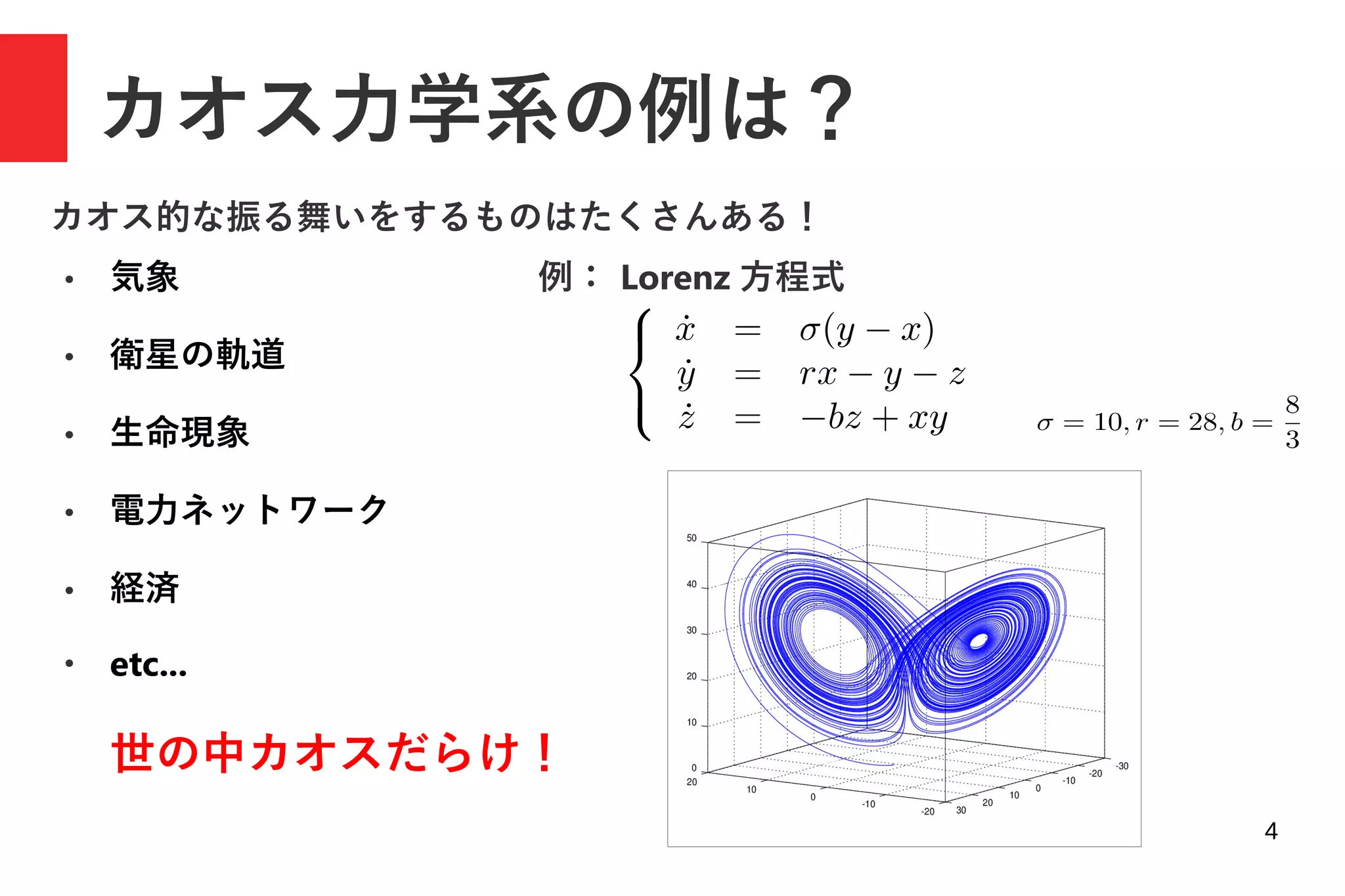
4 カオス力学系の例は? ● 気象 ● 衛星の軌道 ●
生命現象 ● 電力ネットワーク ● 経済 ● etc... カオス的な振る舞いをするものはたくさんある! 例: Lorenz 方程式 世の中カオスだらけ!
5.
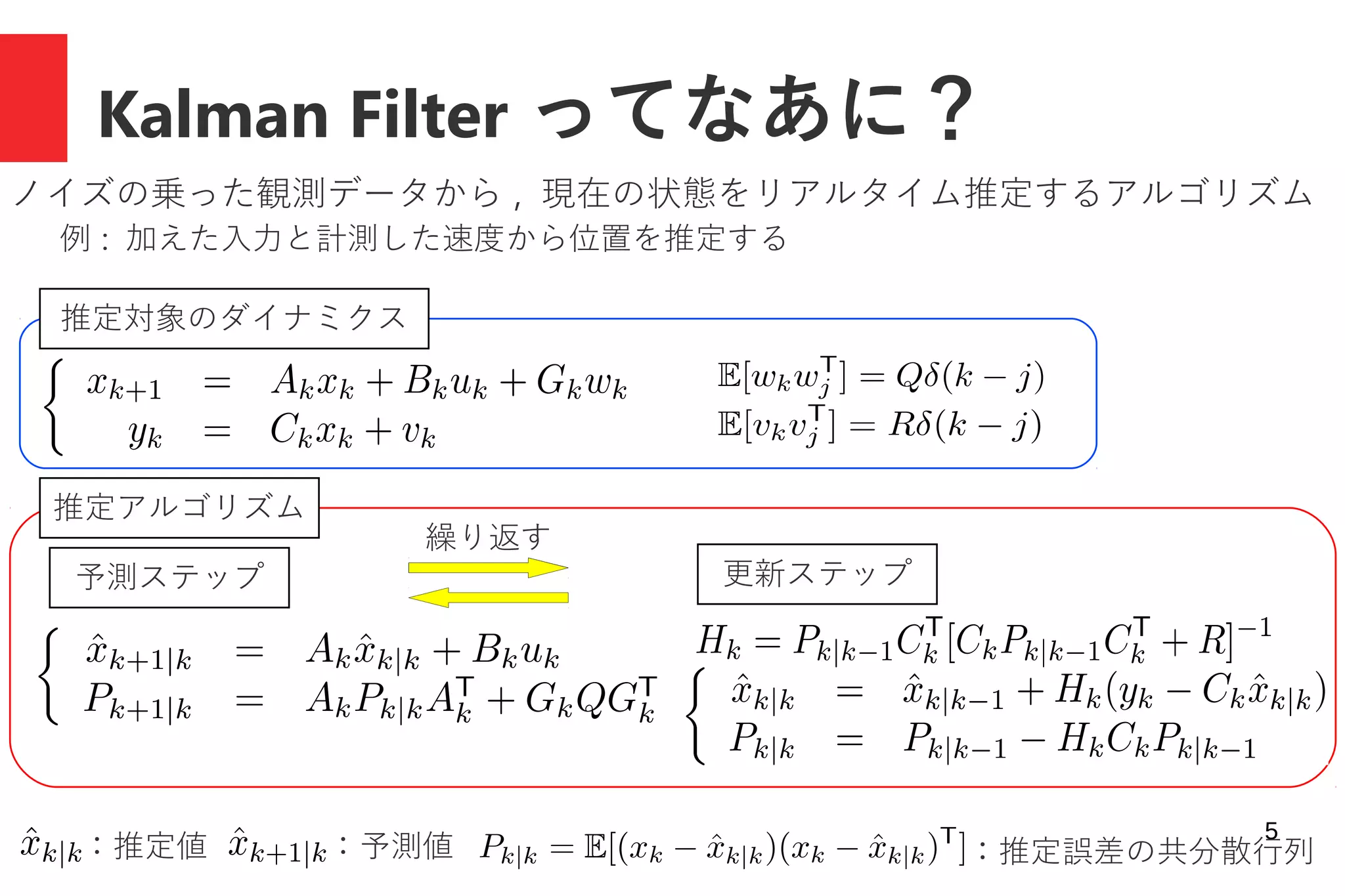
5 Kalman Filter ってなあに? ノイズの乗った観測データから
, 現在の状態をリアルタイム推定するアルゴリズム 例 : 加えた入力と計測した速度から位置を推定する 推定対象のダイナミクス 推定アルゴリズム 予測ステップ 更新ステップ 繰り返す :推定値 :予測値 :推定誤差の共分散行列
6.
6 何が難しいの? 1. 普通の Kalman
Filter は線形システムにしか適用できない ● 線形システムではそもそもカオス的な振る舞いは見えない ● カオス的振る舞いは非線形システム特有の現象 2. 1 つの初期値から決定論的に推定を行うので , カオス的振る舞いに弱い ● カオス力学系では , 少しの誤差が”圧倒的成長”を遂げて大きな誤差になる
7.
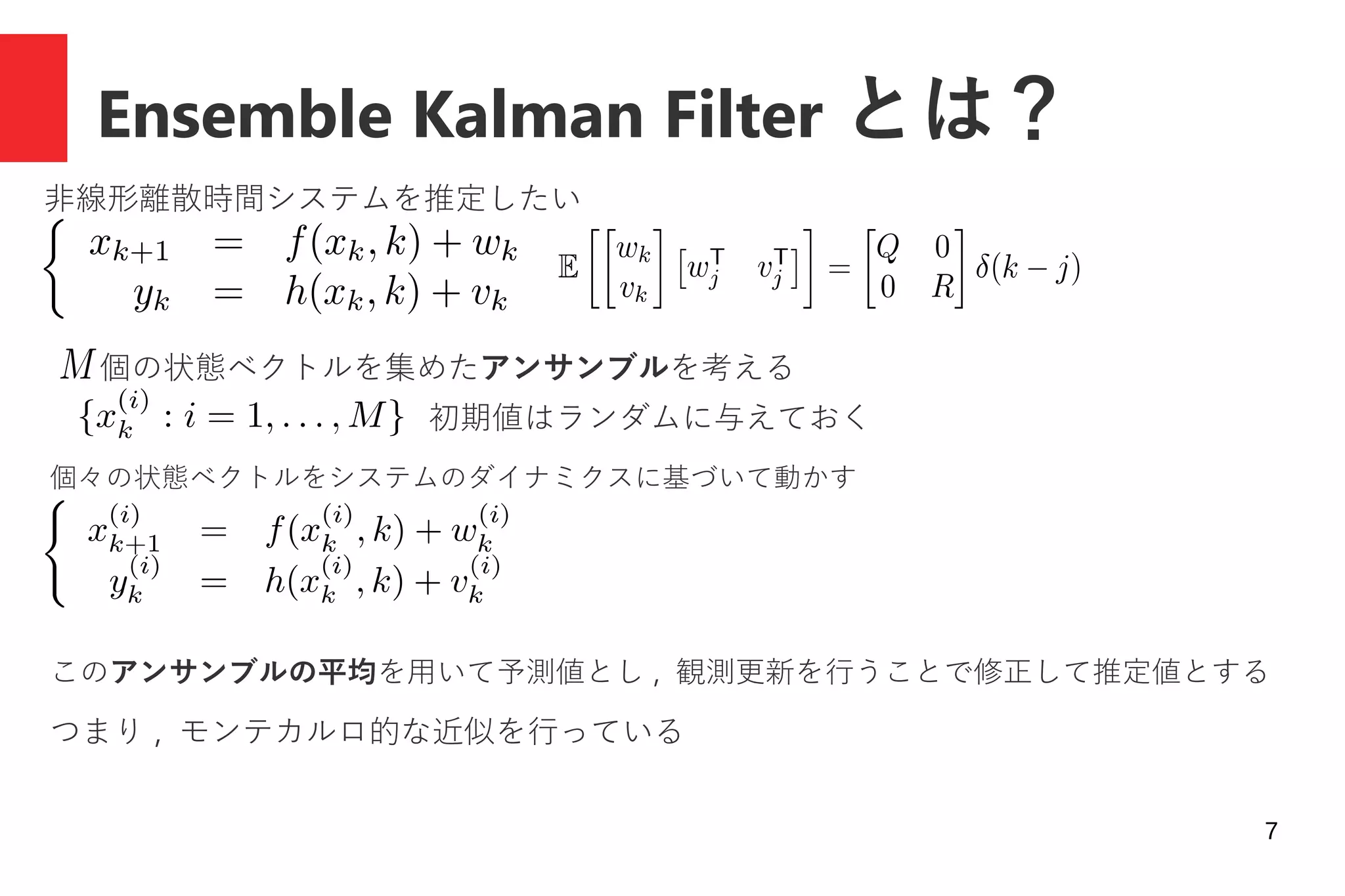
7 Ensemble Kalman Filter
とは? 非線形離散時間システムを推定したい 個の状態ベクトルを集めたアンサンブルを考える 個々の状態ベクトルをシステムのダイナミクスに基づいて動かす 初期値はランダムに与えておく このアンサンブルの平均を用いて予測値とし , 観測更新を行うことで修正して推定値とする つまり , モンテカルロ的な近似を行っている
8.
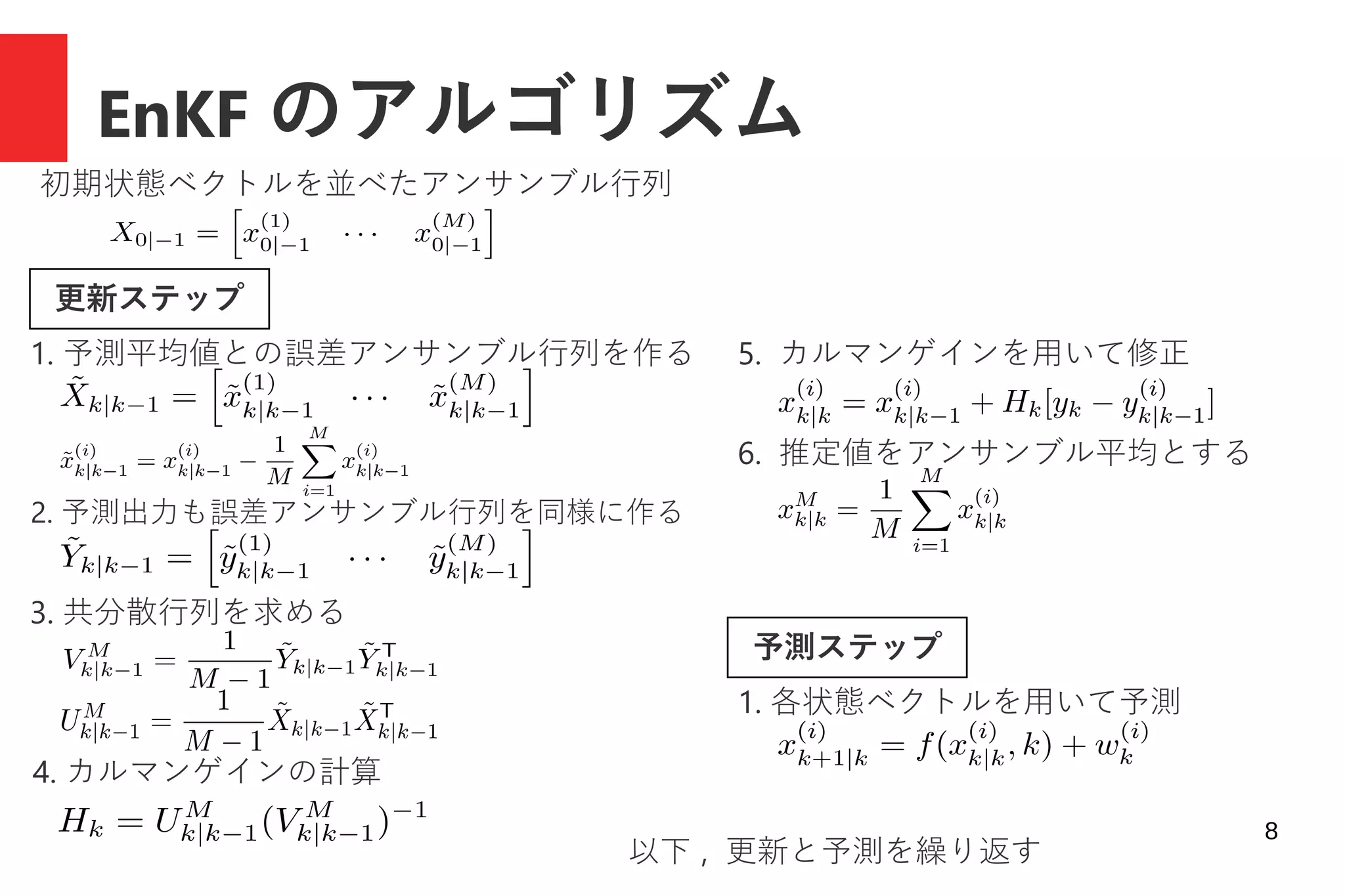
8 EnKF のアルゴリズム 初期状態ベクトルを並べたアンサンブル行列 予測ステップ 更新ステップ 1. 予測平均値との誤差アンサンブル行列を作る 2.
予測出力も誤差アンサンブル行列を同様に作る 3. 共分散行列を求める 4. カルマンゲインの計算 5. カルマンゲインを用いて修正 6. 推定値をアンサンブル平均とする 1. 各状態ベクトルを用いて予測 以下 , 更新と予測を繰り返す
9.
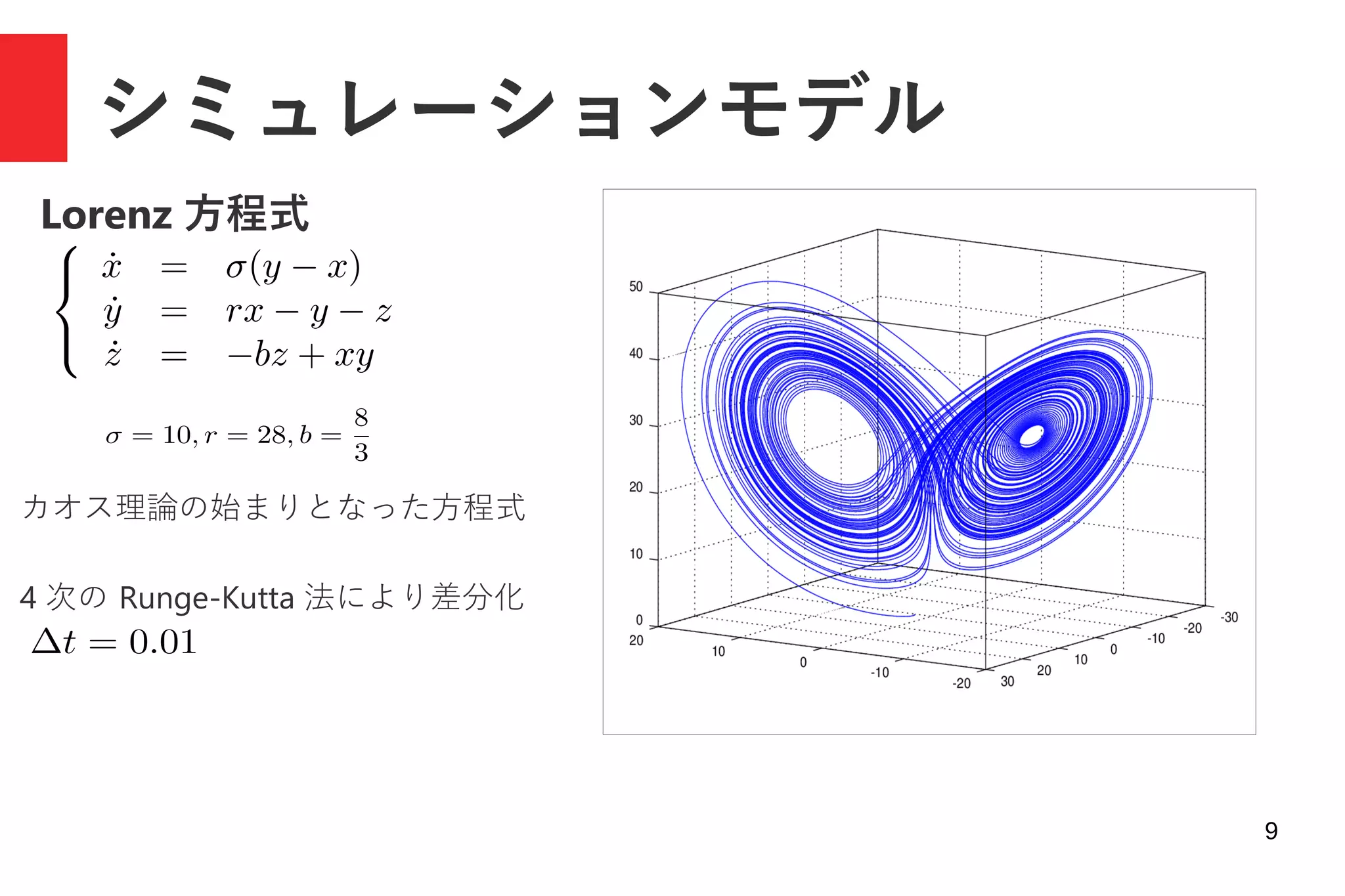
9 シミュレーションモデル Lorenz 方程式 カオス理論の始まりとなった方程式 4 次の
Runge-Kutta 法により差分化
10.
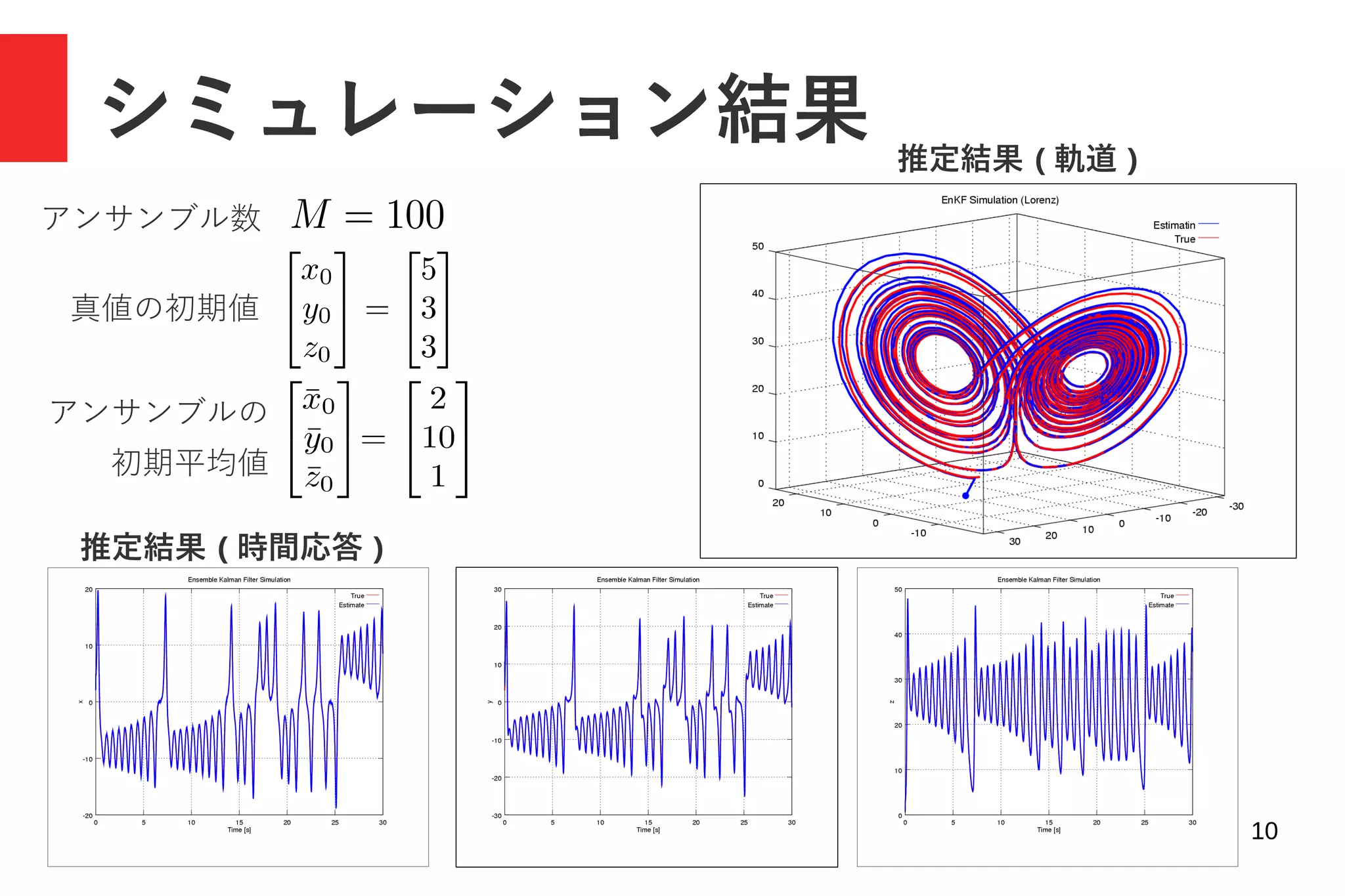
10 シミュレーション結果 アンサンブル数 真値の初期値 アンサンブルの 初期平均値 推定結果 ( 軌道
) 推定結果 ( 時間応答 )
11.
11 まとめ 普通の Kalman Filter
では , 非線形系であるカオス力学系をうまく推定することができない → Ensemble Kalman Filter と呼ばれる非線形 Kalman Filter を紹介 Ensemble Kalman Filter では , 多数の状態ベクトルを作りモンテカルロ的な近似で推定を行う → シミュレーションによって有効性を示した Ensemble Kalman Filter の利点 ● 非線形系に適用できる ● 逆行列計算のコストが小さい ● アンサンブル数も比較的少なめでいい Ensemble Kalman Filter の欠点 ● 推定精度は Particle Filter には劣る ● 推定対象の次元が小さい場合は , 計算コストが他に比較して大きくなる
Download













![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]Deep Learning 第2章 線形代数](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearningchapter2-180601014406-thumbnail.jpg?width=640&height=640&fit=bounds)








































