Download to read offline



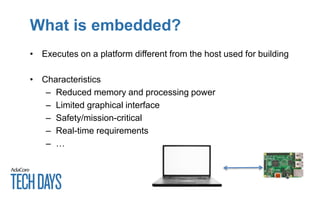
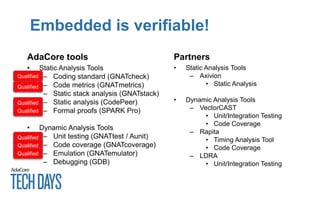
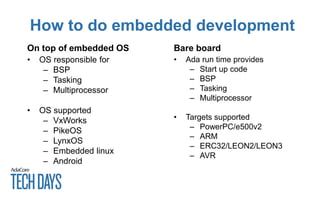
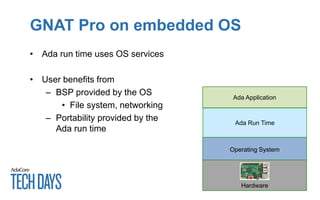
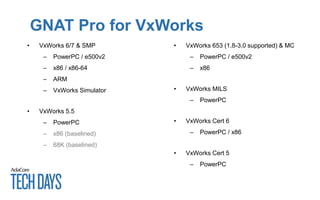
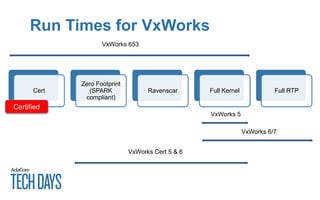
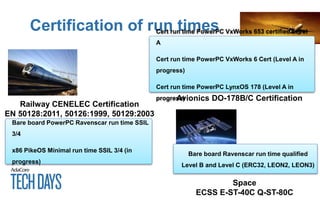
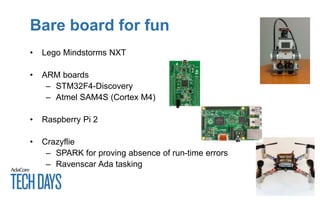

The document discusses embedded product line updates from AdaCore. It describes embedded development using bare boards or embedded OSes like VxWorks, PikeOS, and Linux. AdaCore's GNAT compiler and tools like CodePeer and SPARK Pro allow developing safety-critical and verified embedded applications in Ada for various targets like PowerPC, ARM, LEON and running on bare boards or operating systems. The document outlines new targets, multicore support, and certification efforts of AdaCore's runtimes. It also presents some example fun projects for embedded development.























































































