Downloaded 135 times


Embedded Linux provides a standardized operating system solution for embedded systems through the Linux kernel. The Linux kernel abstracts the underlying hardware and provides drivers to interface with hardware peripherals. This allows application developers to focus on their code without needing to manage low-level hardware interactions. A bootloader initializes the hardware and loads the Linux kernel from memory. The kernel then loads and runs programs stored in the filesystem. Cross-compilers allow the same source code to target different processor architectures. Libraries and drivers help share code and resources across applications and hardware.
Overview of Embedded Linux by Wilson Wingston Sharon.
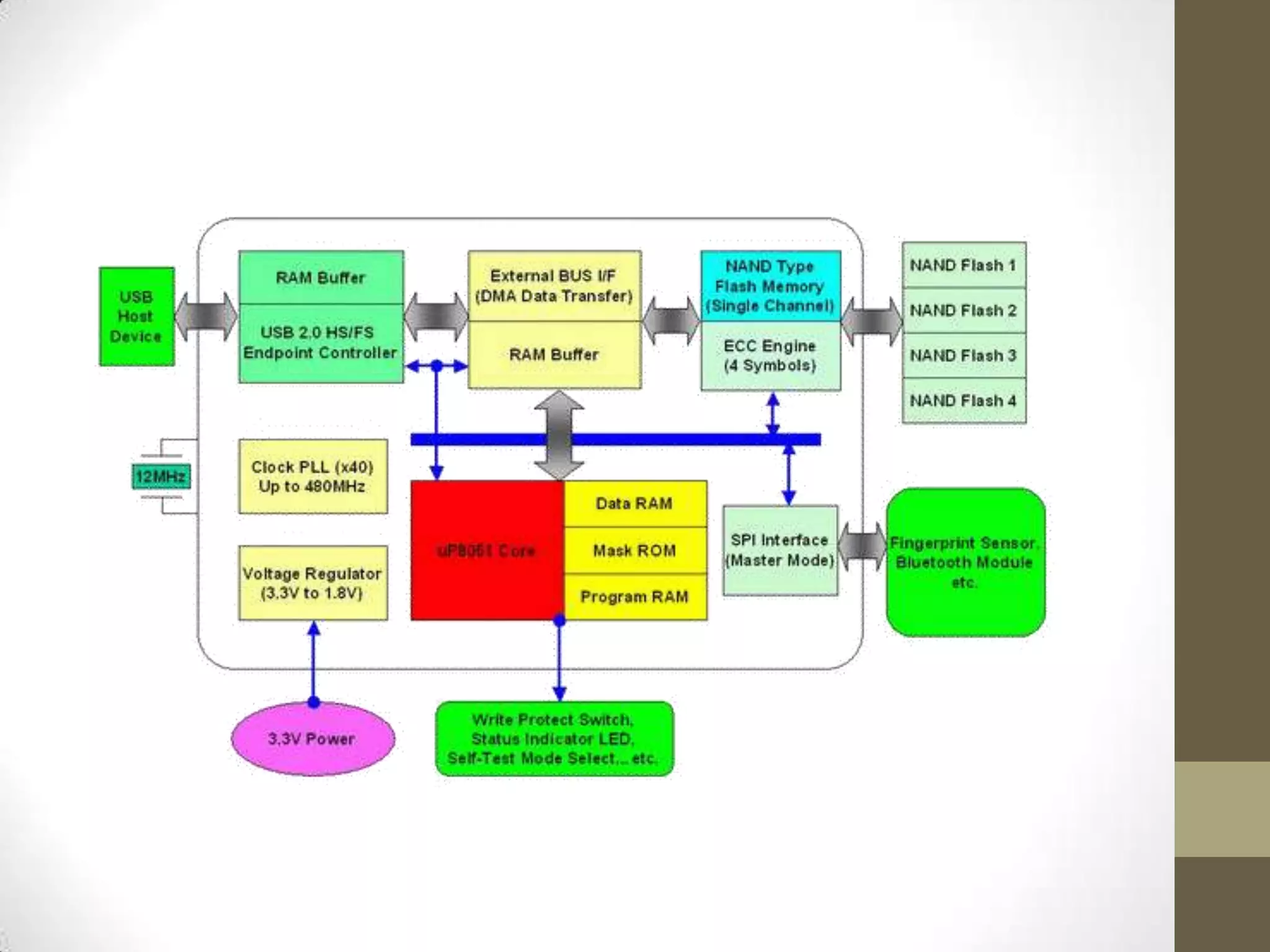
Define embedded systems - intelligent control systems with microcontrollers and peripherals.
Introduction to AVR Atmega328, detailing its functionality and applications like robotics.
Details on programming Atmega328 microcontrollers requiring compilers and EPROM burning devices.
Issues in native C programming for microcontrollers; the need for register-level programming.
Increased hardware complexity demands abstracted development frameworks for easier software creation.
Complex hardware requires significant coding for control, leading to development challenges.
Emergence of driver libraries to simplify hardware control in software applications.
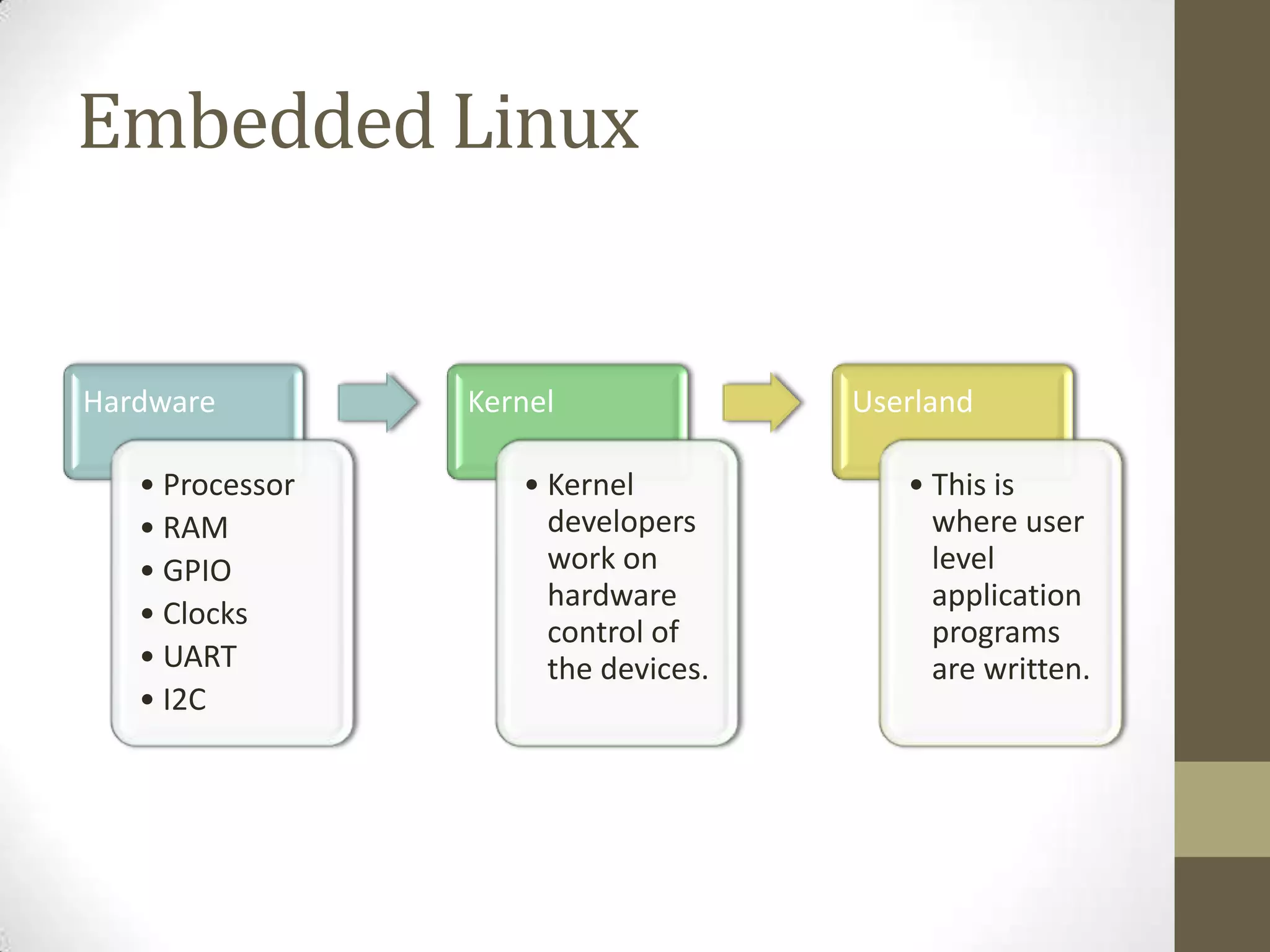
Structure of embedded Linux, including hardware, kernel, and userland applications.
Origin of Linux in the 1990s; collaborative enhancements led to robust support for diverse hardware.
Embedded developers use HAL for efficient hardware interaction while developing applications.
Difference in memory requirements for Embedded Linux versus desktop Linux; minimal filesystem virtualized.
Bootloader initializes hardware; loads kernel into RAM to start the Linux session.
Various bootloaders including BIOS in Intel Motherboards and small embedded bootloaders.
Kernel's purpose and portability, supporting various hardware platforms through device drivers.
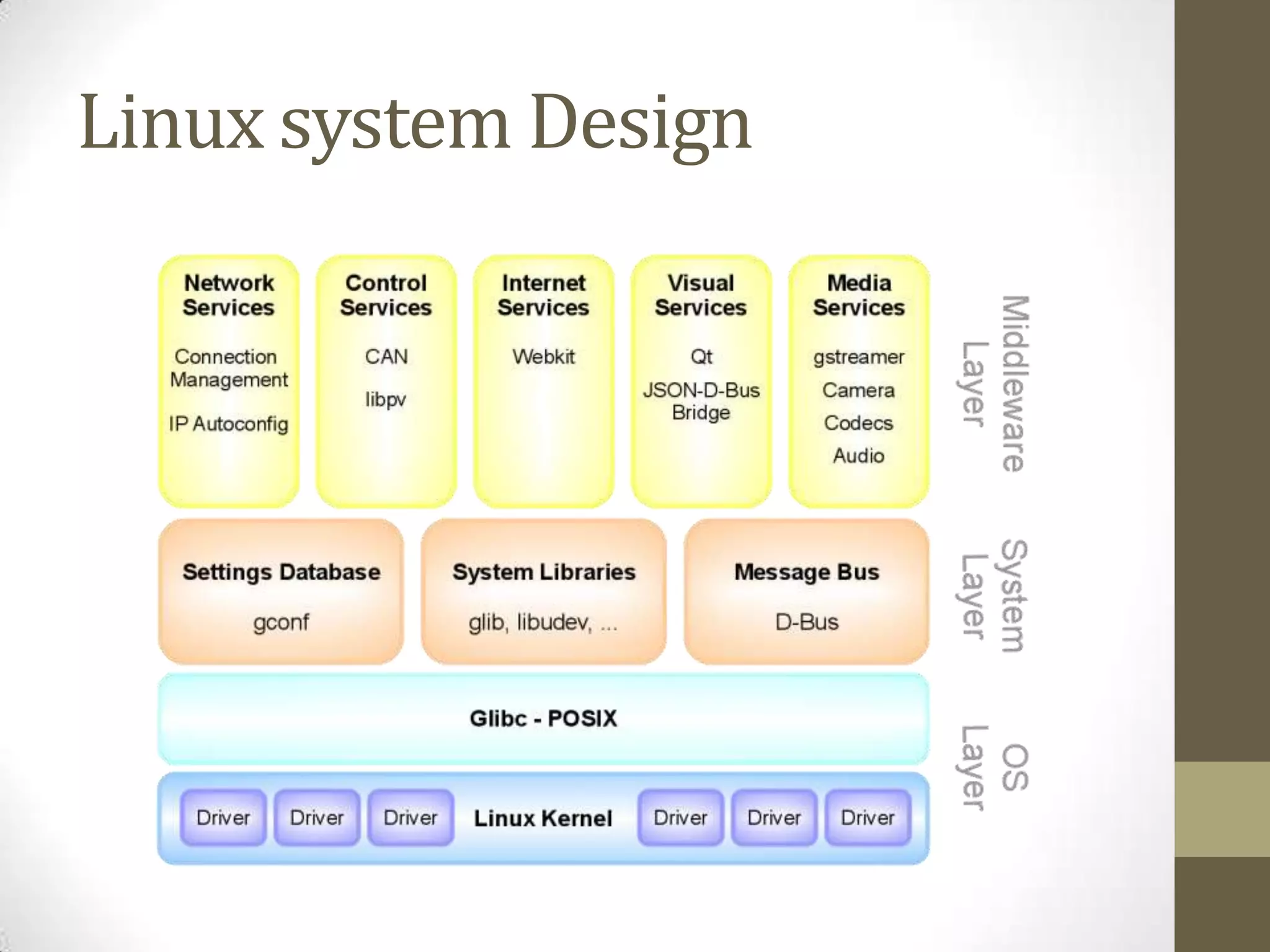
Overview of Linux system architecture focusing on files, userland, and application integration.
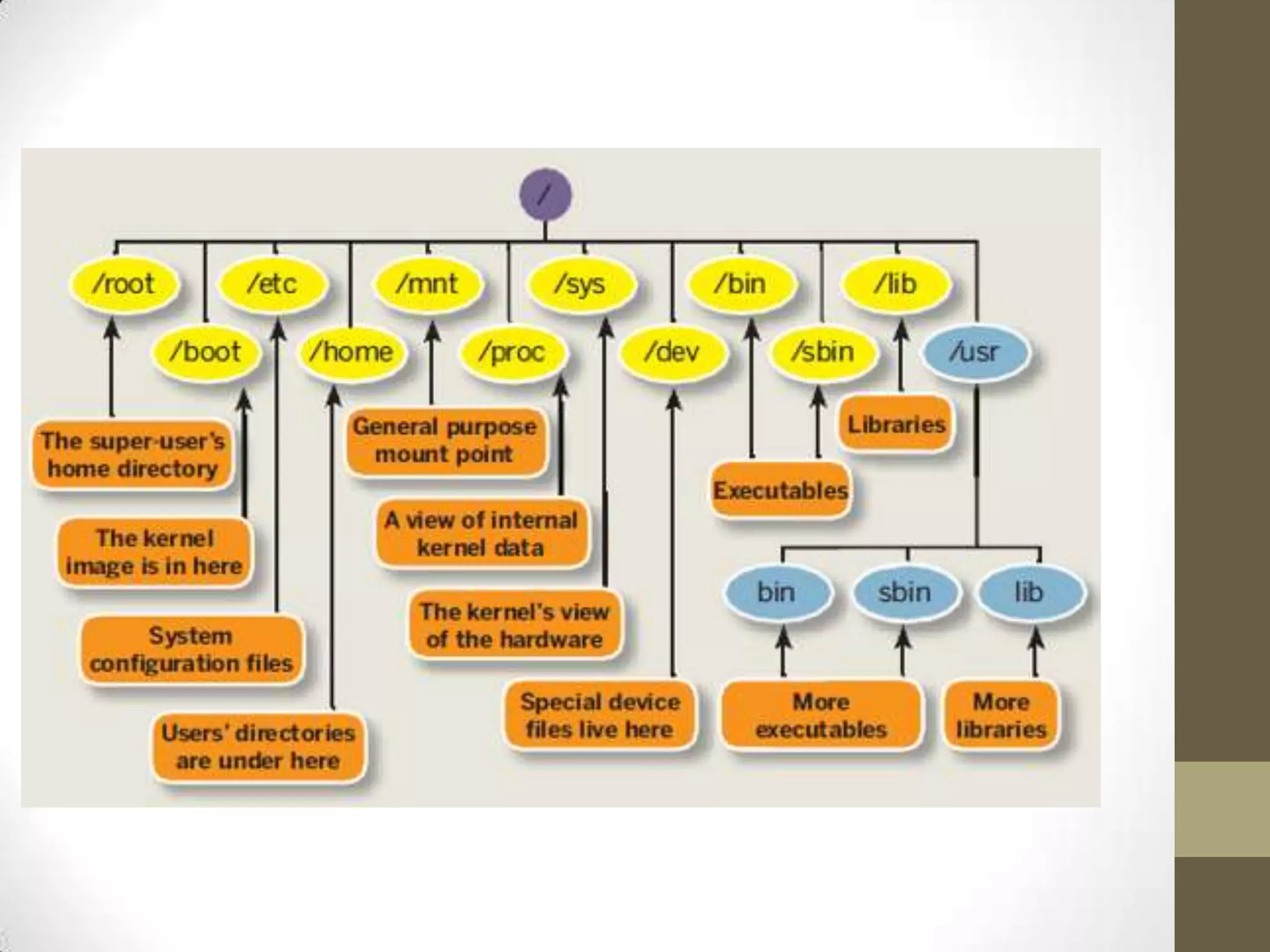
Filesystem structure in Linux, storing directories, executables, and linking hardware.
Cross compilers enable code translation for different architectures; toolchains facilitate development.
Applications range from headless devices to GUI applications; Android as a unified OS example.
Drivers integrate with Linux kernel for hardware peripherals; proprietary driver options exist.
C libraries facilitate interaction with kernel functions; minimal libraries for embedded use.
Custom applications built with cross-compilers; BusyBox offers embedded shell capabilities.
Management of applications, daemons, kernel threads, and real-time support in Linux.
Functionality of MMU in memory protection; virtual memory aids stability during errors.
Commands to inspect memory and running processors, enhancing user interaction with the system.
Different open source licenses explained, including GPL and effects on proprietary drivers.
















































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)






