180°
B
A
C
180°
180°
Vista Frente
360°
Vista Arriba
Autor:WilliamJose Echavez Morales
Base
Base
Rotor1
Rotor2
Rotor1
Rotor2
B
Pinza
Pinza
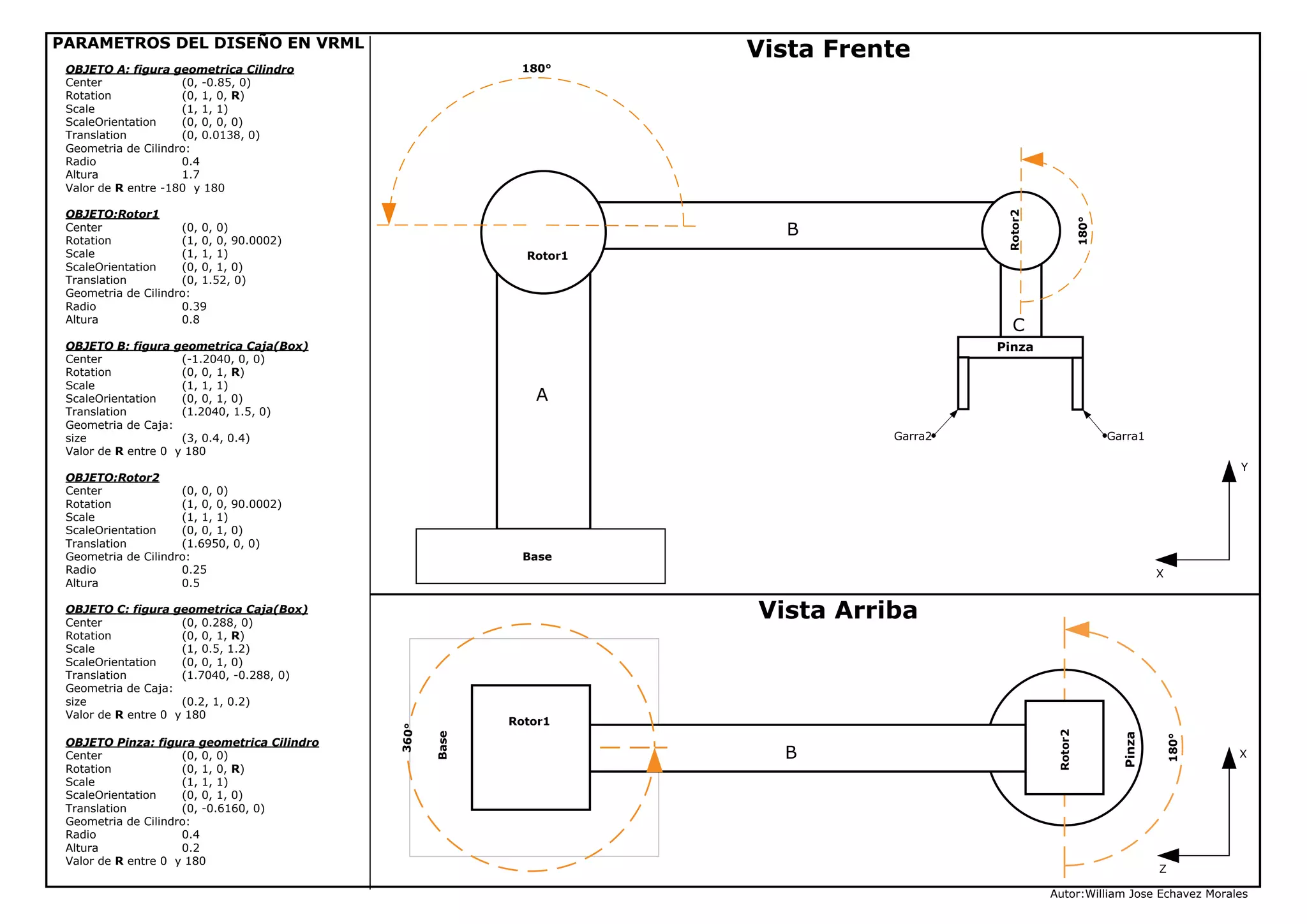
PARAMETROS DEL DISEÑO EN VRML
OBJETO A: figura geometrica Cilindro
Center (0, -0.85, 0)
Rotation (0, 1, 0, R)
Scale (1, 1, 1)
ScaleOrientation (0, 0, 0, 0)
Translation (0, 0.0138, 0)
Geometria de Cilindro:
Radio 0.4
Altura 1.7
Valor de R entre -180 y 180
OBJETO:Rotor1
Center (0, 0, 0)
Rotation (1, 0, 0, 90.0002)
Scale (1, 1, 1)
ScaleOrientation (0, 0, 1, 0)
Translation (0, 1.52, 0)
Geometria de Cilindro:
Radio 0.39
Altura 0.8
OBJETO B: figura geometrica Caja(Box)
Center (-1.2040, 0, 0)
Rotation (0, 0, 1, R)
Scale (1, 1, 1)
ScaleOrientation (0, 0, 1, 0)
Translation (1.2040, 1.5, 0)
Geometria de Caja:
size (3, 0.4, 0.4)
Valor de R entre 0 y 180
OBJETO:Rotor2
Center (0, 0, 0)
Rotation (1, 0, 0, 90.0002)
Scale (1, 1, 1)
ScaleOrientation (0, 0, 1, 0)
Translation (1.6950, 0, 0)
Geometria de Cilindro:
Radio 0.25
Altura 0.5
OBJETO C: figura geometrica Caja(Box)
Center (0, 0.288, 0)
Rotation (0, 0, 1, R)
Scale (1, 0.5, 1.2)
ScaleOrientation (0, 0, 1, 0)
Translation (1.7040, -0.288, 0)
Geometria de Caja:
size (0.2, 1, 0.2)
Valor de R entre 0 y 180
OBJETO Pinza: figura geometrica Cilindro
Center (0, 0, 0)
Rotation (0, 1, 0, R)
Scale (1, 1, 1)
ScaleOrientation (0, 0, 1, 0)
Translation (0, -0.6160, 0)
Geometria de Cilindro:
Radio 0.4
Altura 0.2
Valor de R entre 0 y 180
Garra1Garra2
X
Y
Z
X