Downloaded 19 times


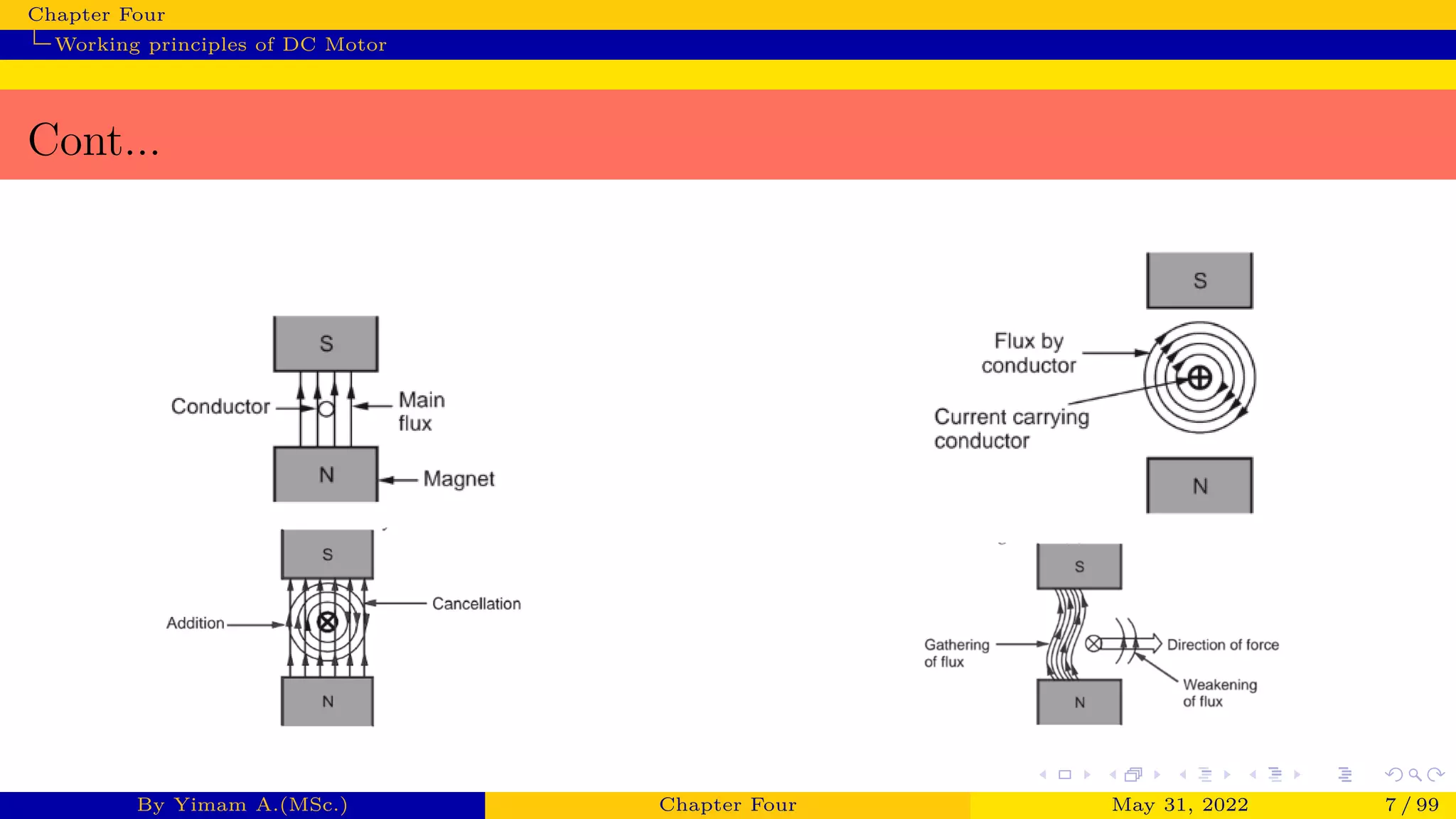
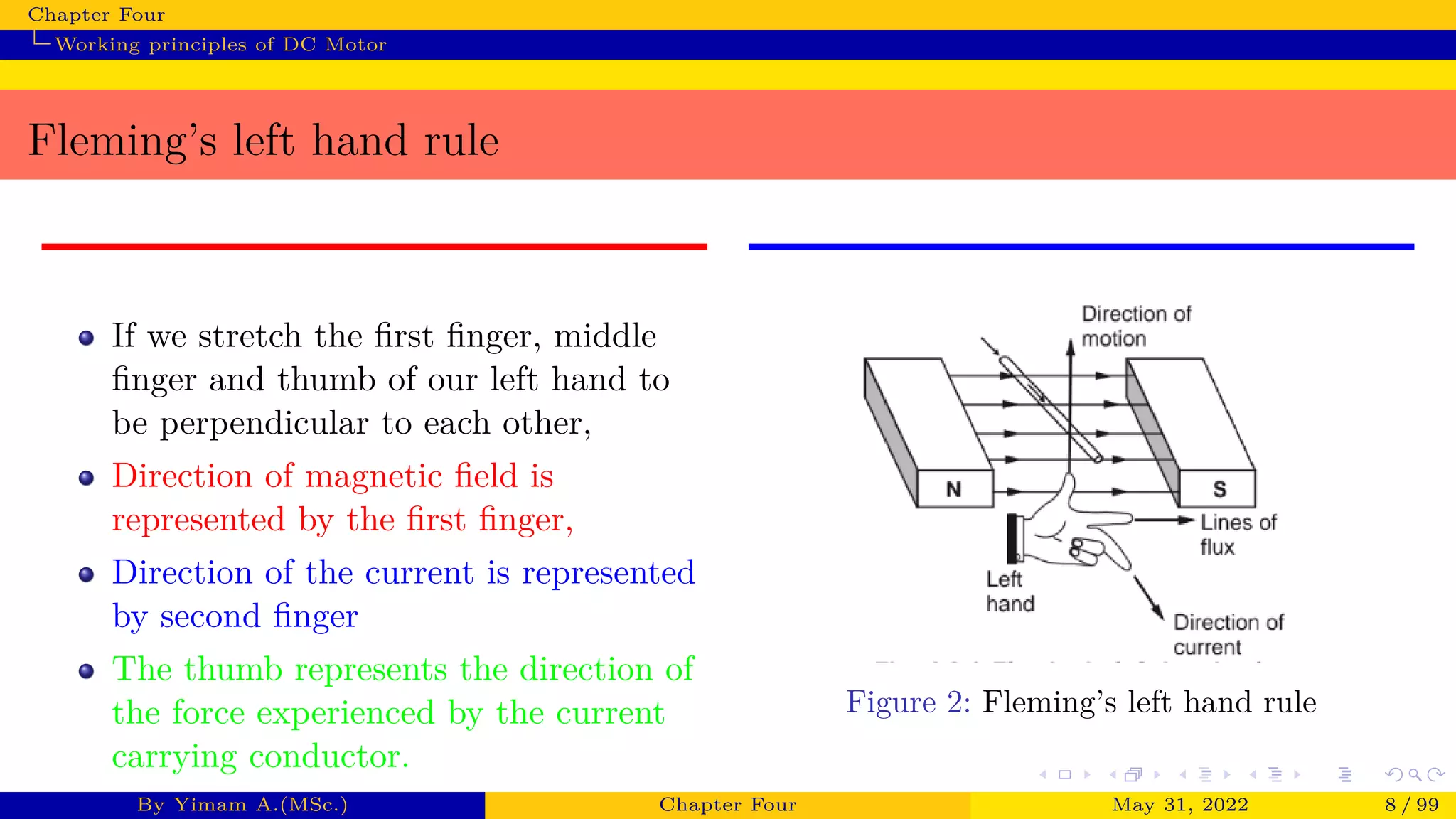
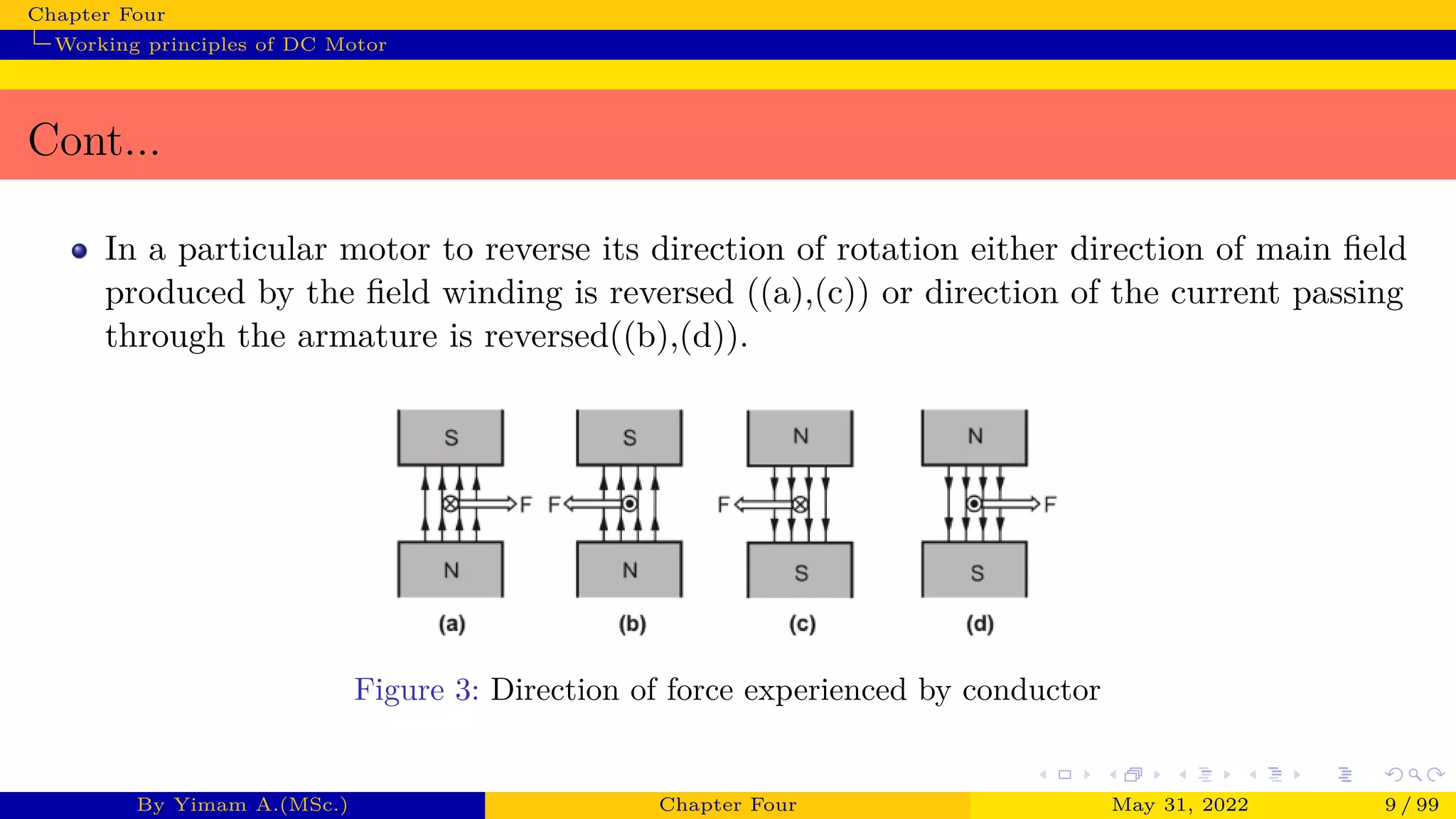





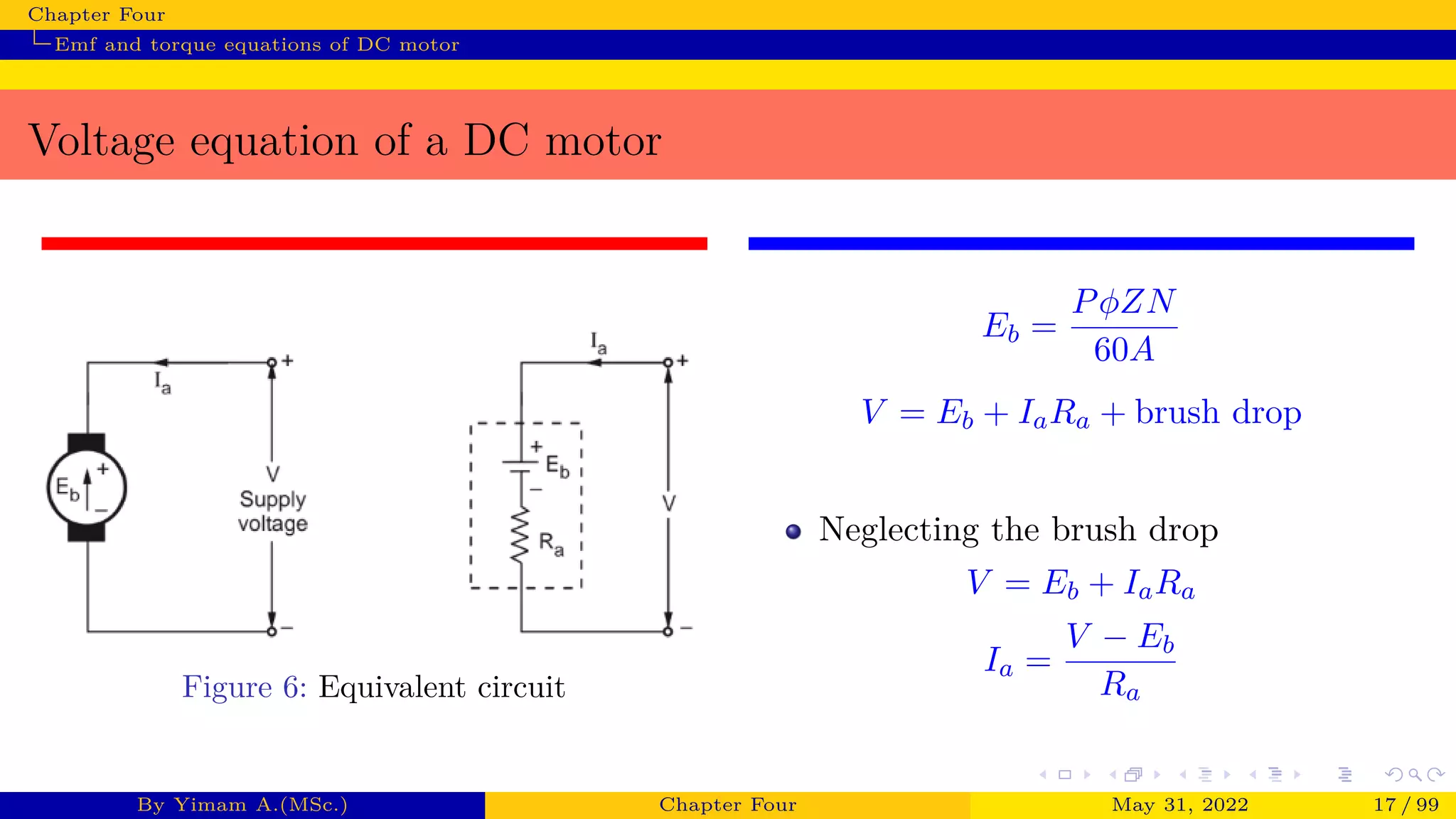






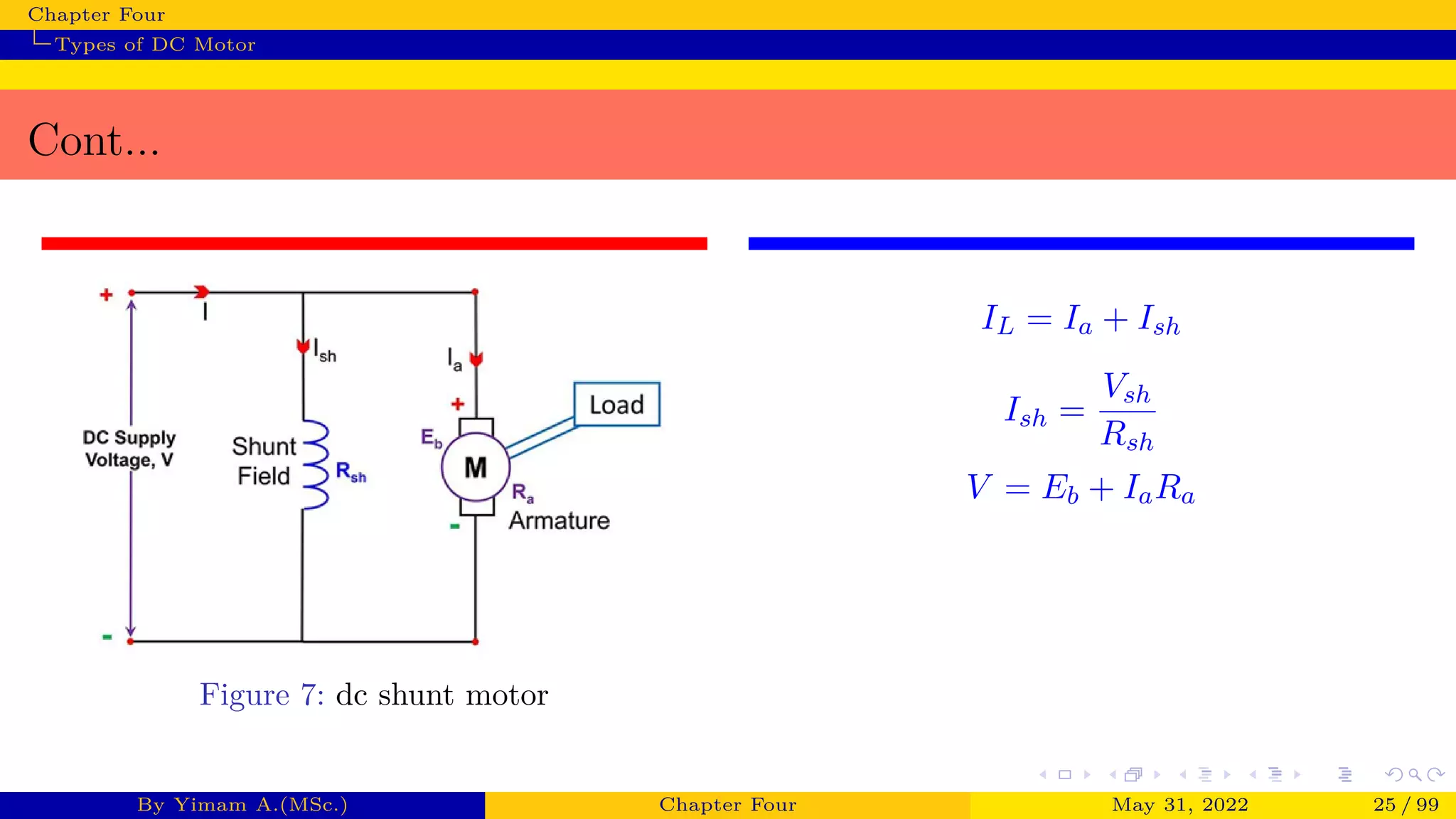

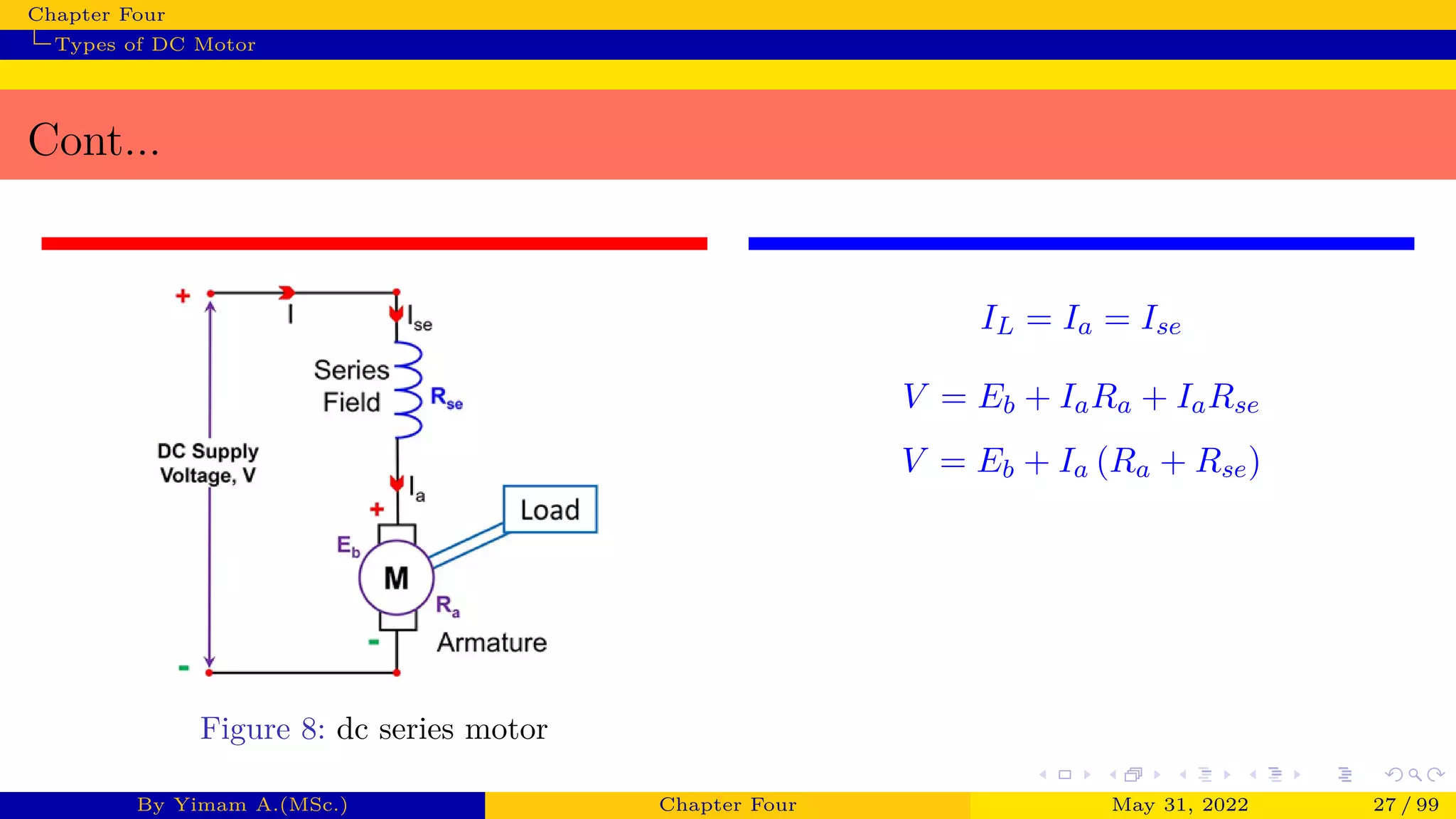


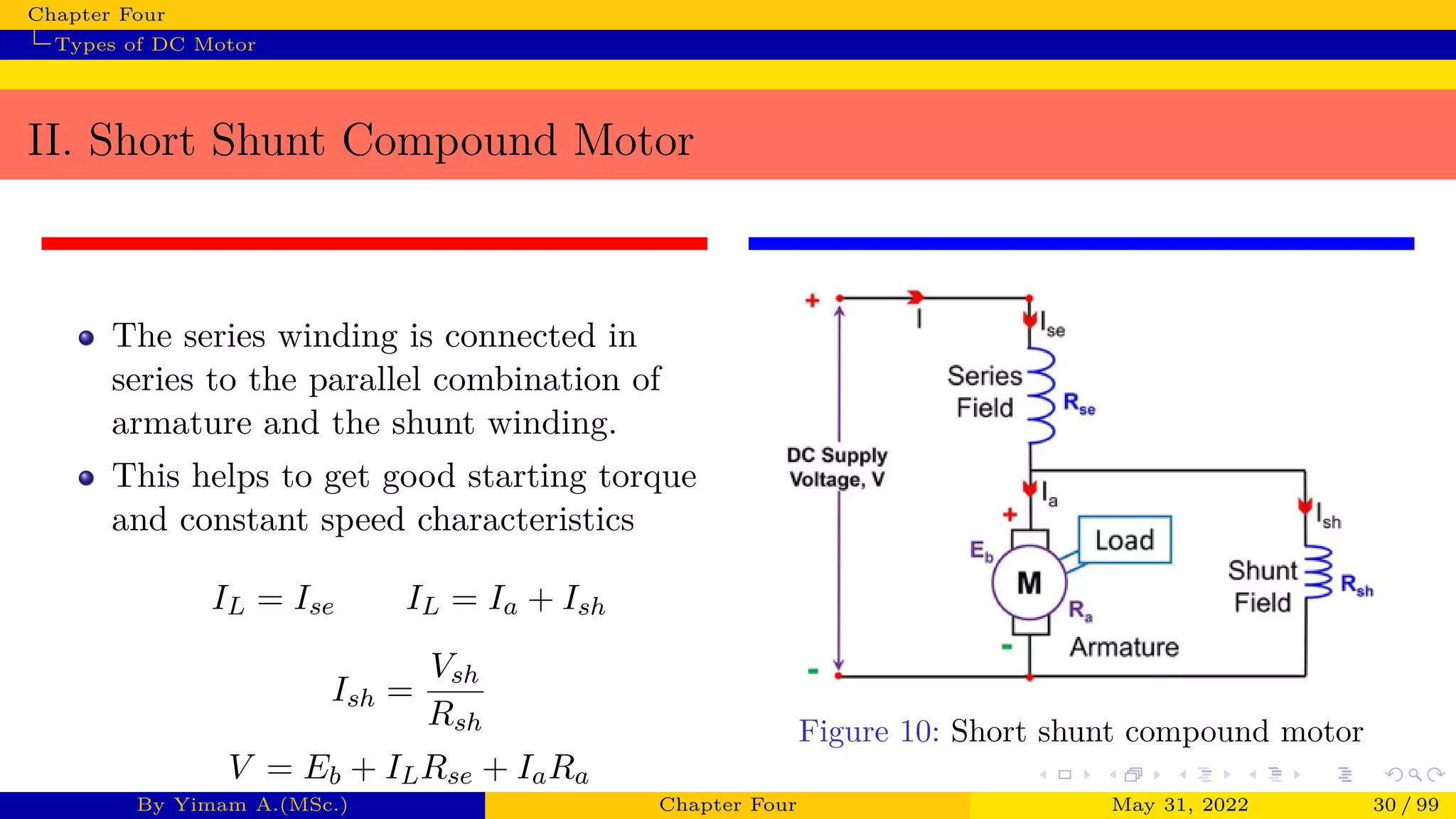





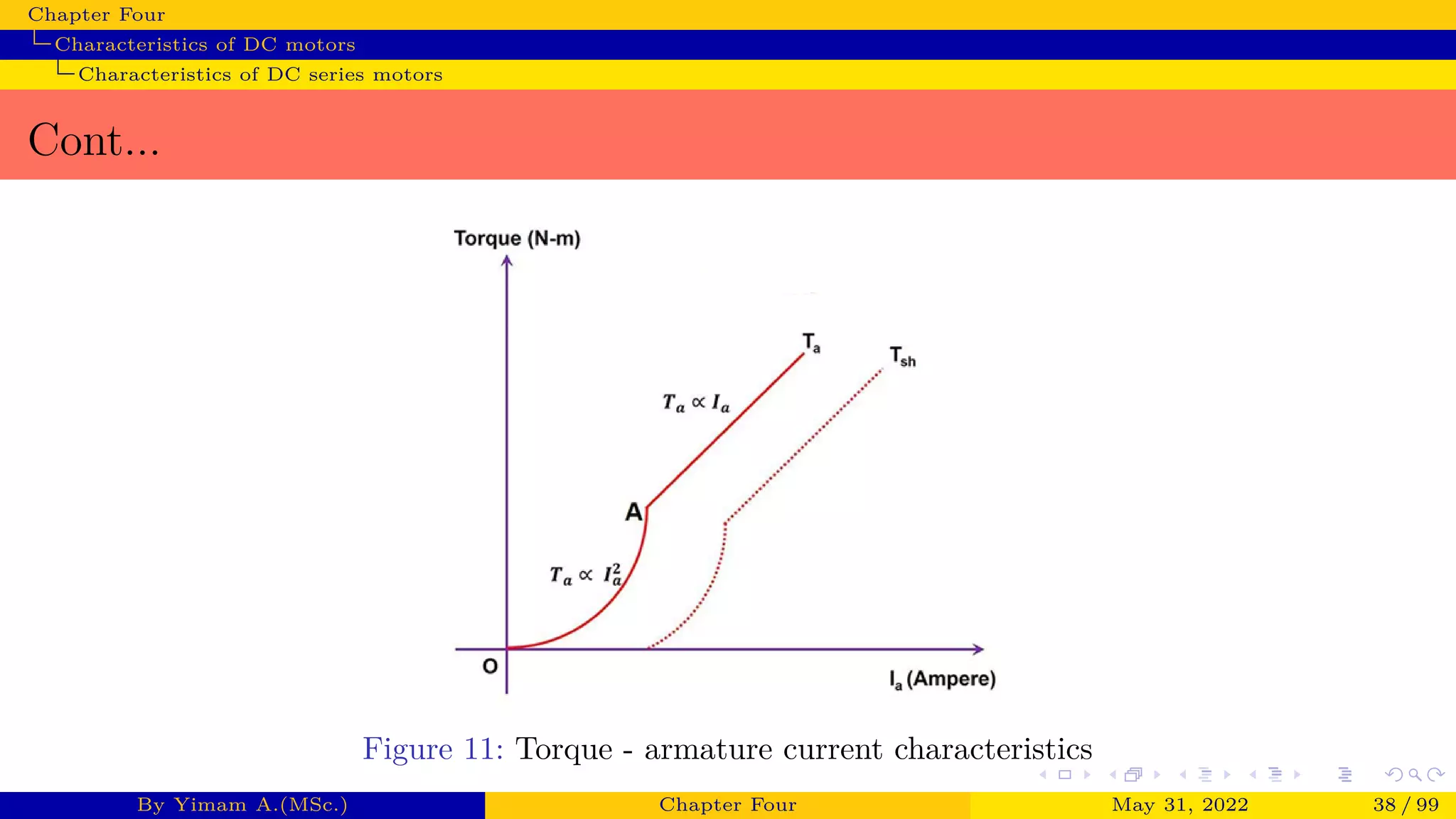

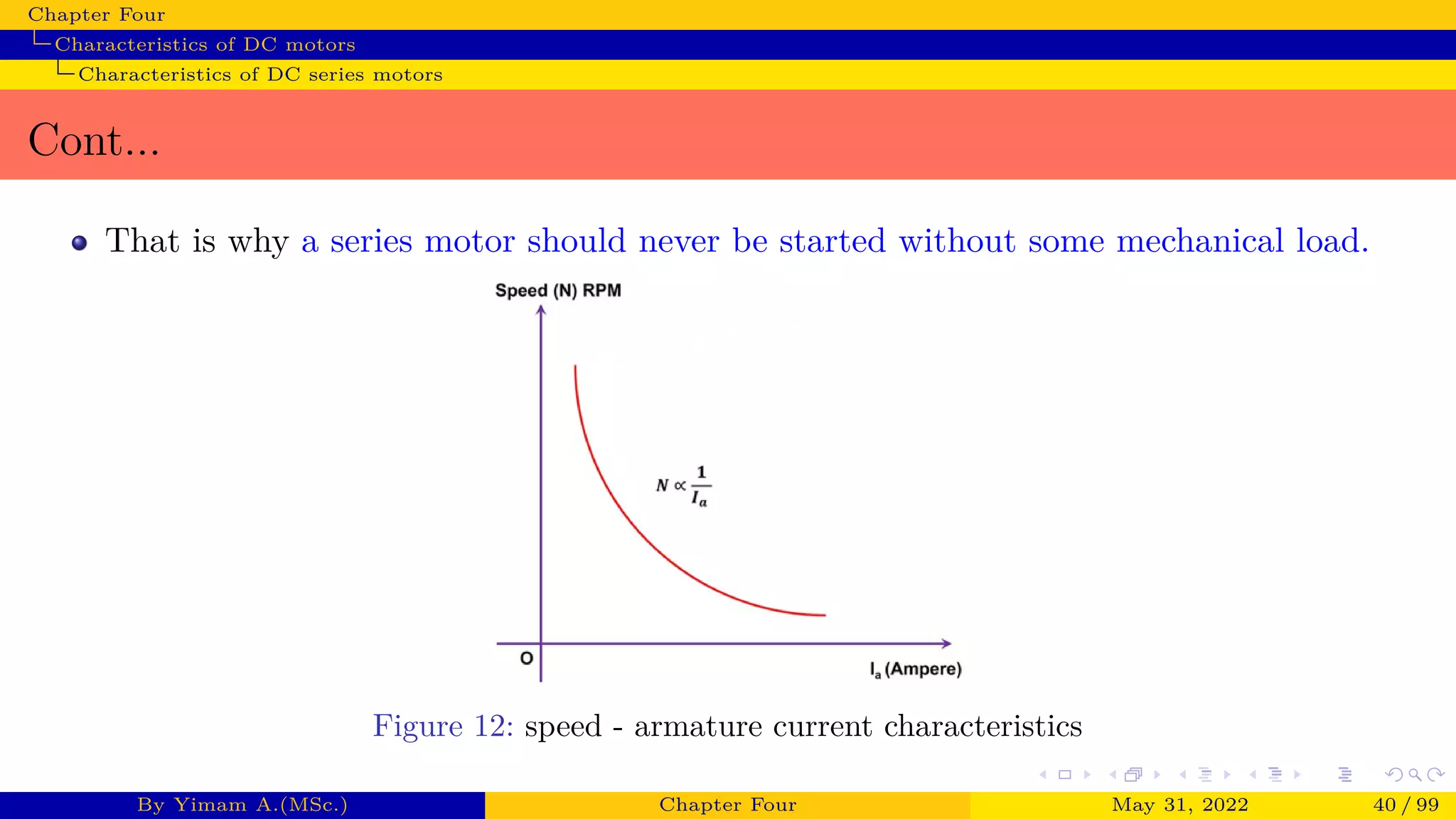


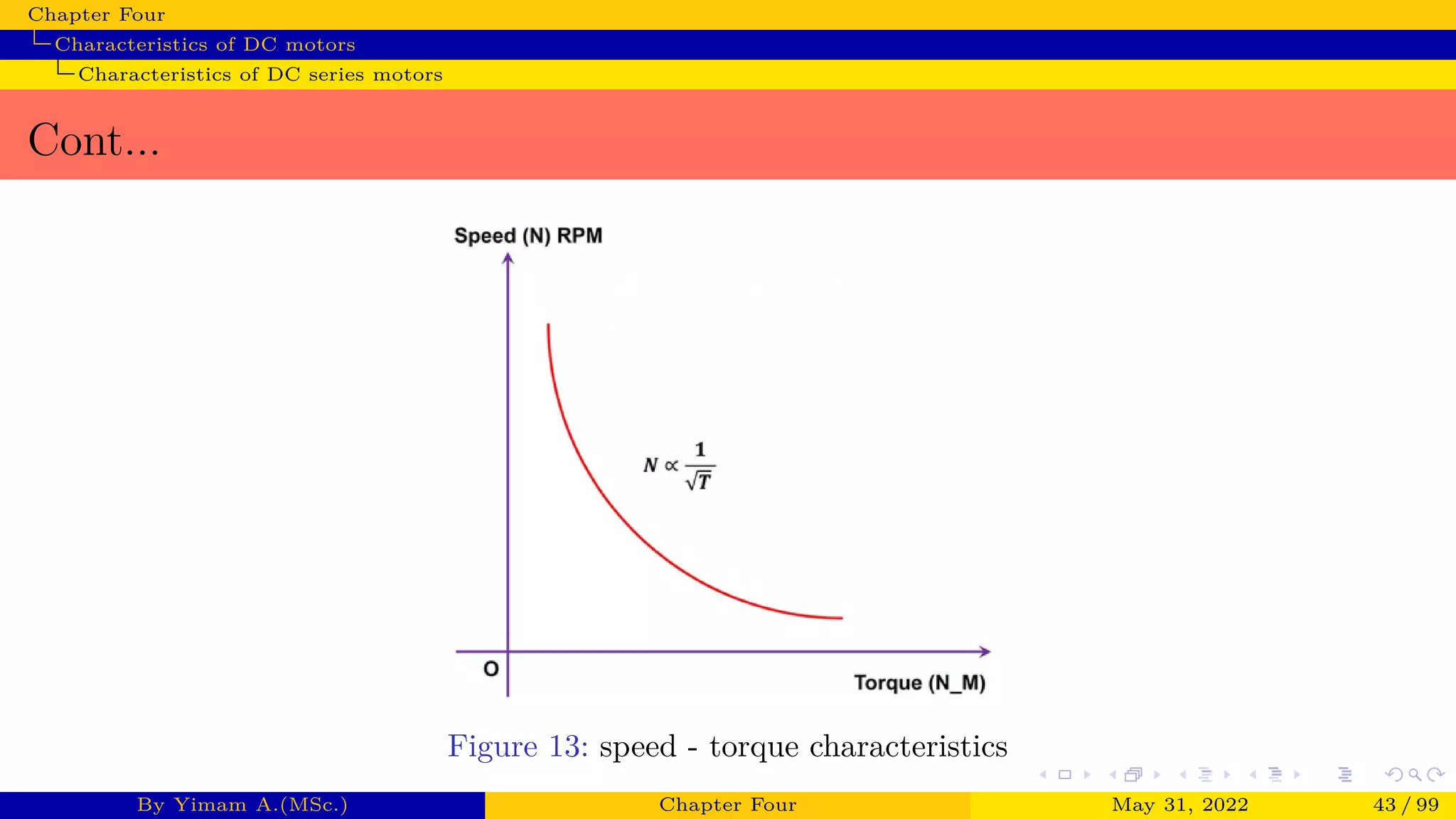



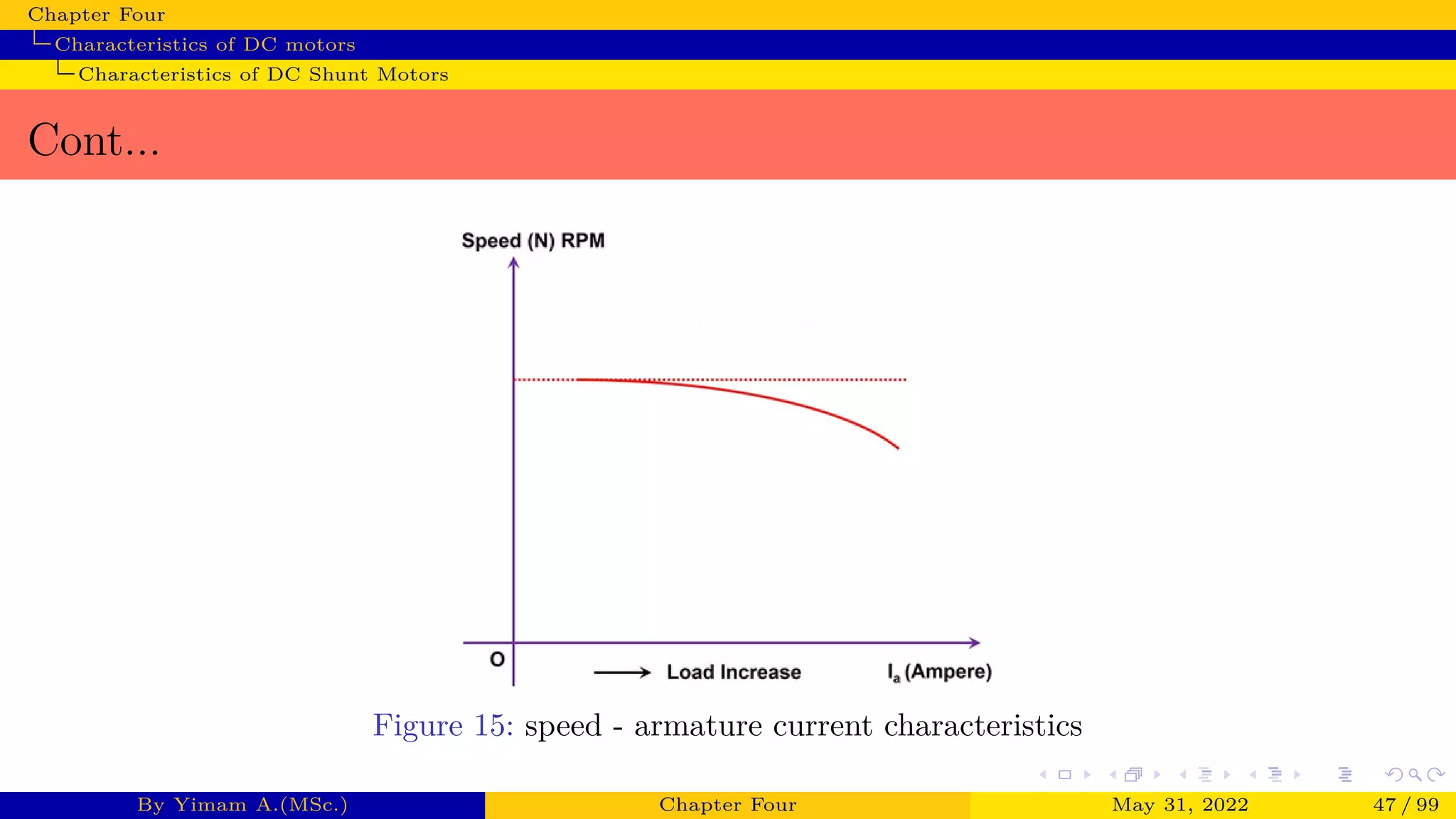
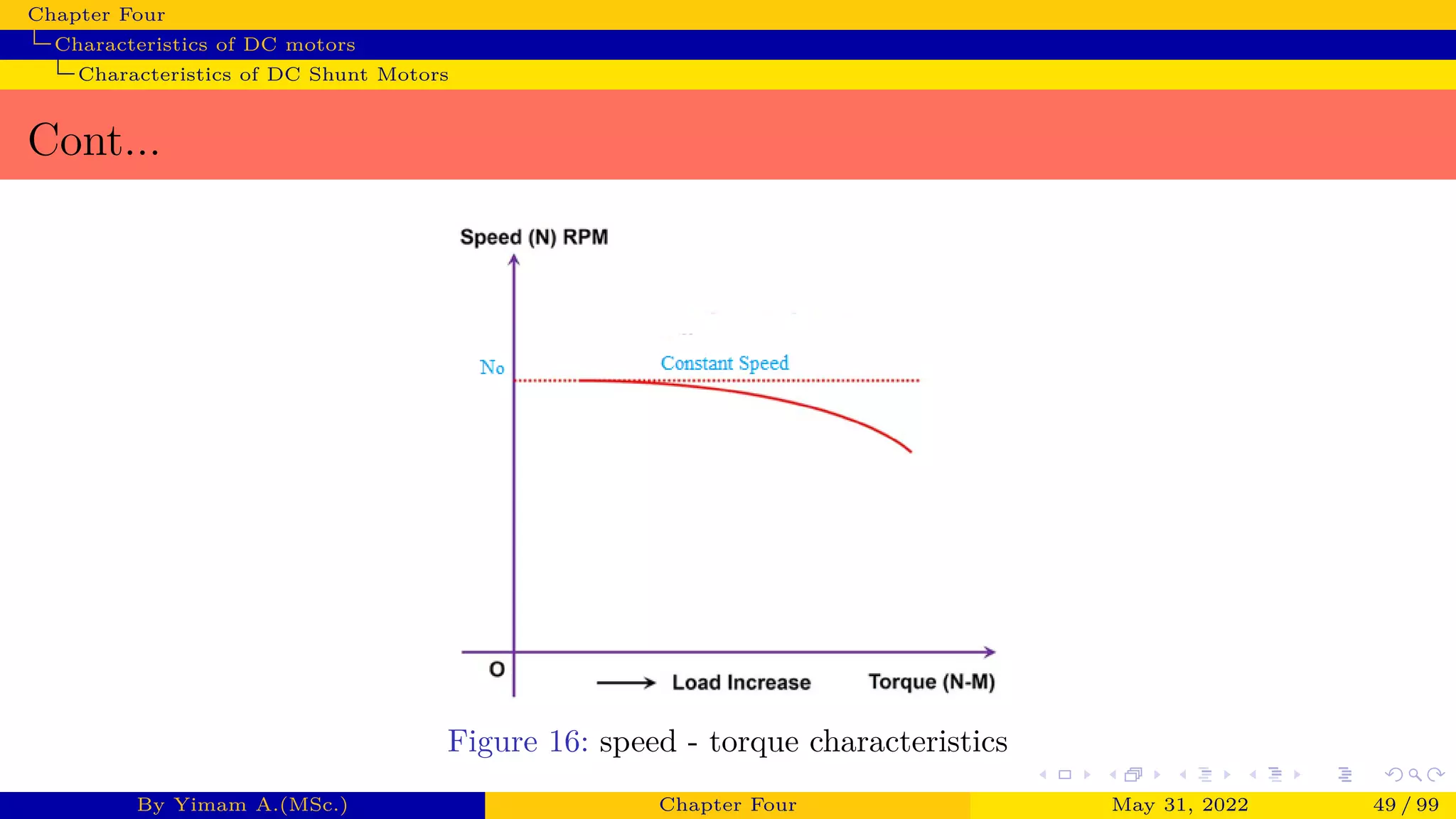






























This chapter discusses DC motors. It begins by explaining the working principle of DC motors using Fleming's left hand rule. It then derives the back EMF, torque, and power equations for DC motors. The chapter describes the equivalent circuit of a DC motor and different types of DC motors including shunt, series, and compound motors. It explains how the torque and speed characteristics vary between motor types based on how the field and armature windings are connected.

































































![Seller Deck - Presentation [Concert L2].PPTX](https://cdn.slidesharecdn.com/ss_thumbnails/sellerdeck-presentationconcertl2-251219171156-24982daf-thumbnail.jpg?width=640&height=640&fit=bounds)

















