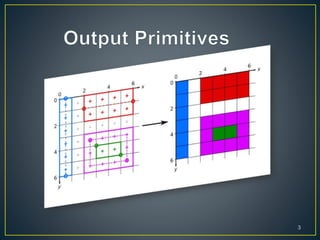
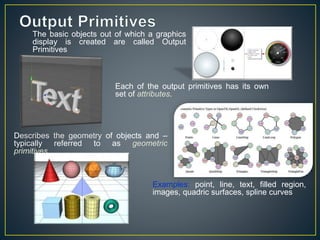
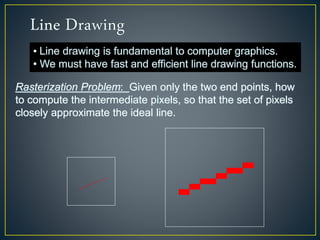
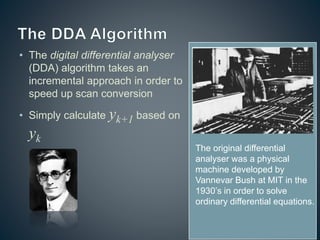
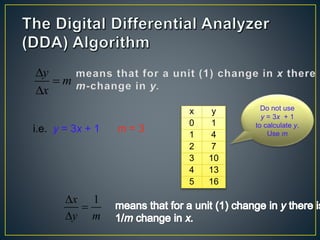
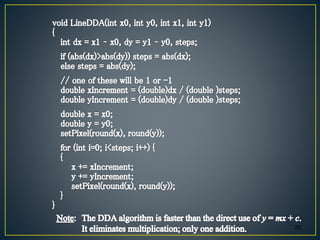
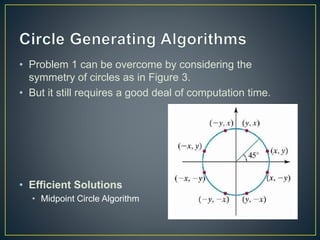
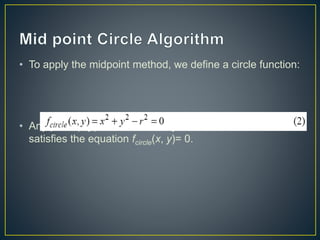
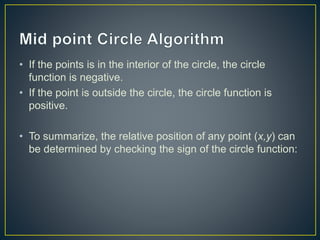
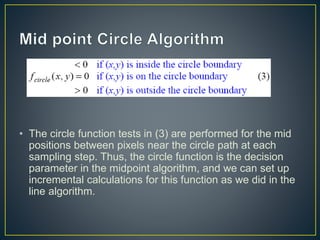
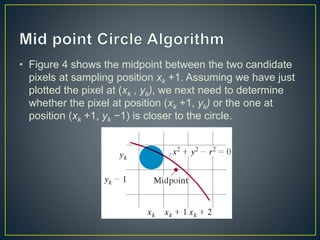
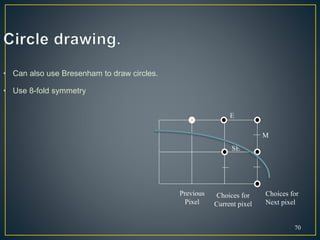
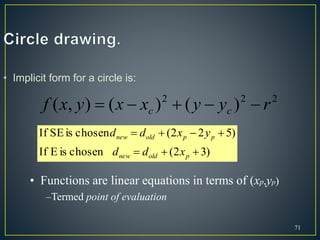
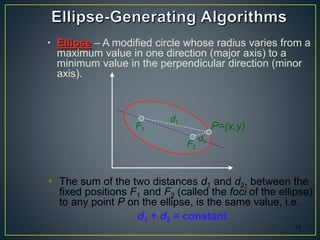
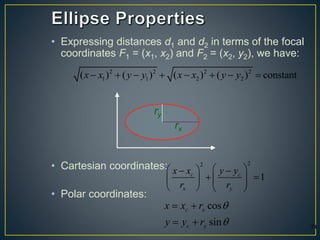
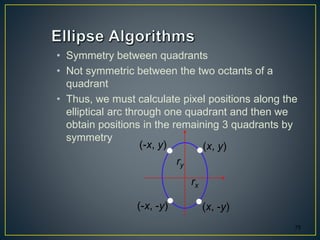
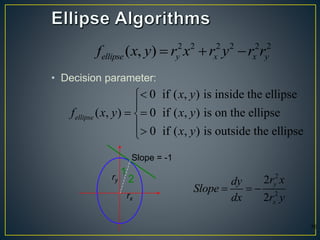
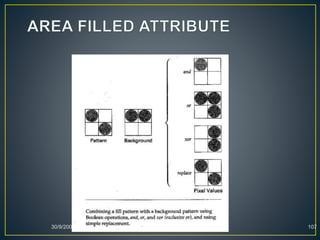
The document describes various computer graphics output primitives and algorithms for drawing them, including lines, circles, and filled areas. It discusses line drawing algorithms like DDA, Bresenham's, and midpoint circle algorithms. These algorithms use incremental integer calculations to efficiently rasterize primitives by determining the next pixel coordinates without performing floating point calculations at each step. The midpoint circle algorithm in particular uses a "circle function" and incremental updates to its value to determine whether the next pixel is inside or outside the circle boundary.
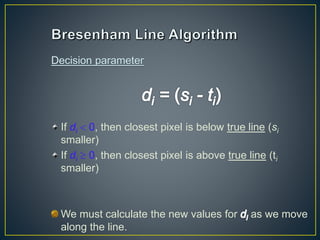

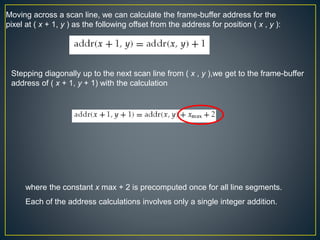
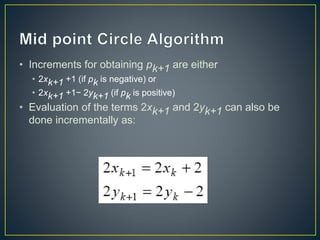
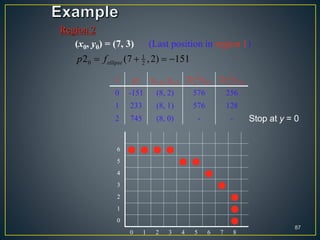
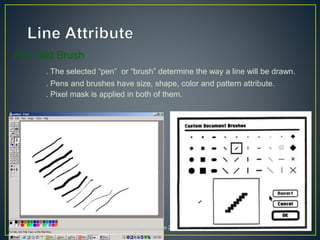
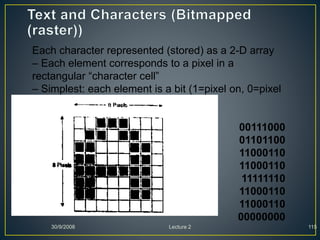
![At the next position [xi+1 + 1 = xi + 2]
OR
where yi+1 = yi
or yi+1 = yi – 1
79
1
1 1 1 2
2 2 2 2 2 21
1 2
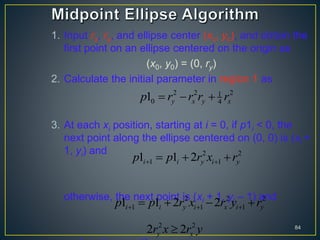
1 ( 1, )
( 2) ( )
i ellipse i i
y i x i x y
p f x y
r x r y r r
2 2 2 2 2 21 1
1 1 2 21 1 2 ( 1) ( ) ( )i i y i y x i ip p r x r r y y
](https://image.slidesharecdn.com/unit1-finalcomplete-200328173111/85/Computer-Graphics-Unit-1-79-320.jpg)
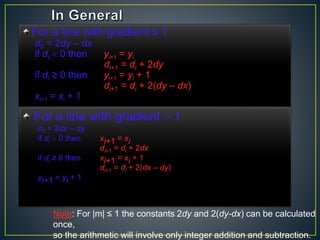
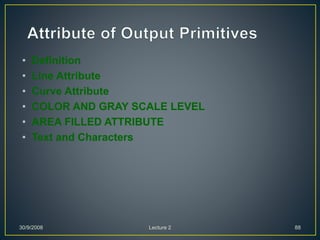
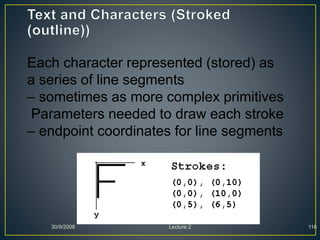
![At the next position [yi+1 – 1 = yi – 2]
OR
where xi+1 = xi
or xi+1 = xi + 1
82
1
1 1 12
2 2 2 2 2 21
1 2
2 ( , 1)
( ) ( 2)
i ellipse i i
y i x i x y
p f x y
r x r y r r
2 2 2 2 21 1
1 1 2 22 2 2 ( 1) ( ) ( )i i x i x y i ip p r y r r x x
](https://image.slidesharecdn.com/unit1-finalcomplete-200328173111/85/Computer-Graphics-Unit-1-82-320.jpg)







































![Chapter 3 - Part 1 [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapter3-part1autosaved-230109040832-9344385c-thumbnail.jpg?width=640&height=640&fit=bounds)






















