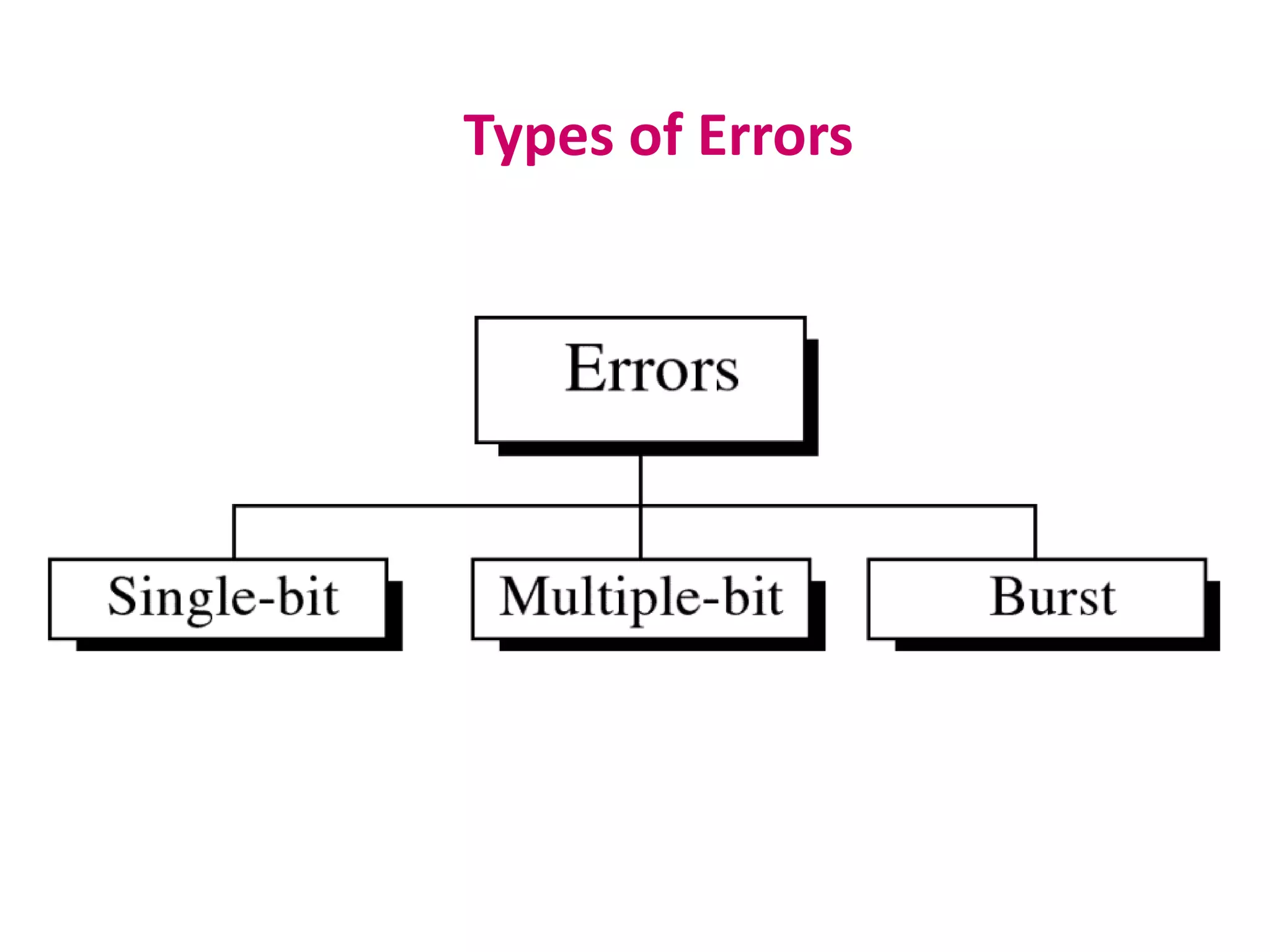
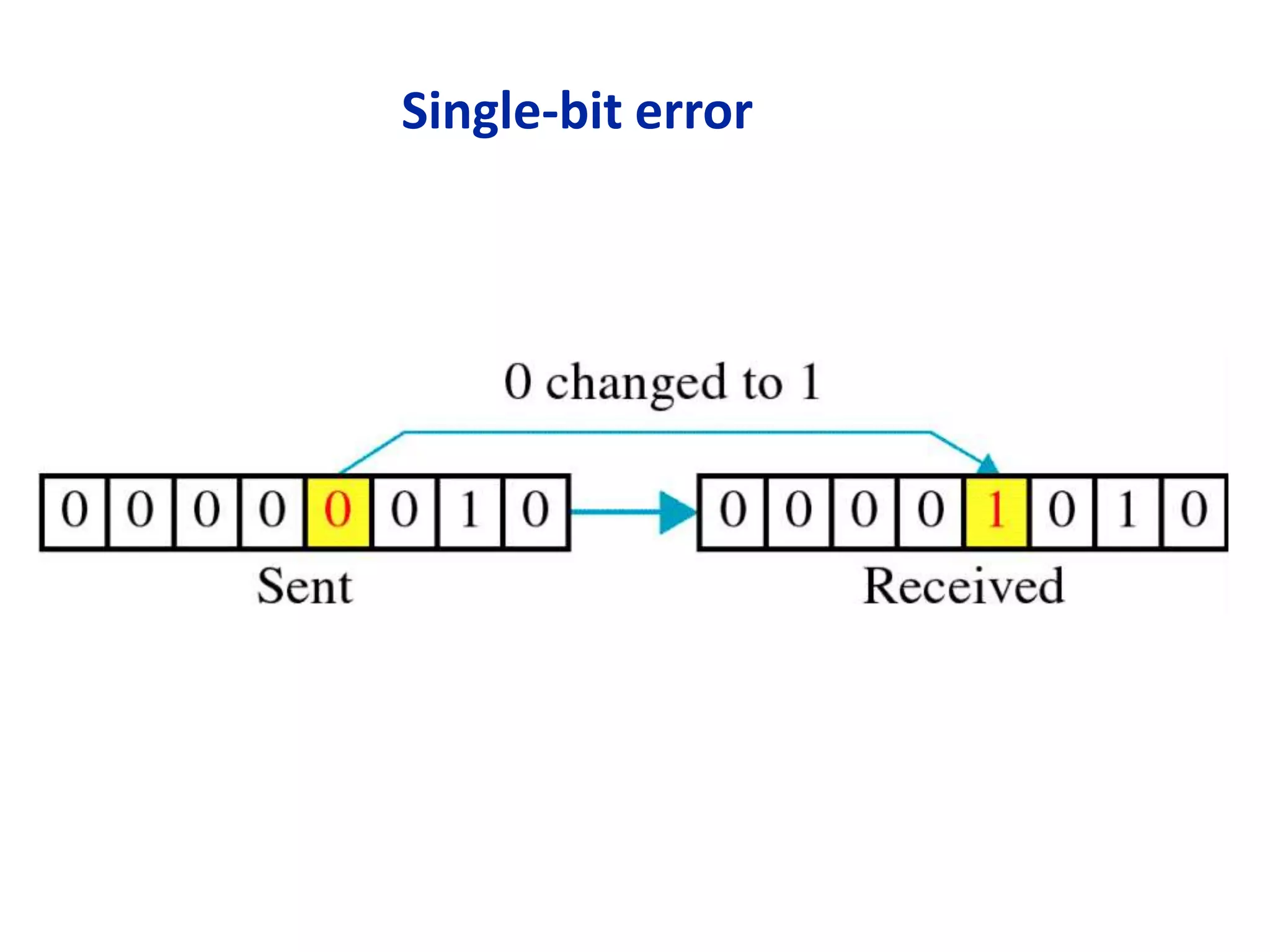
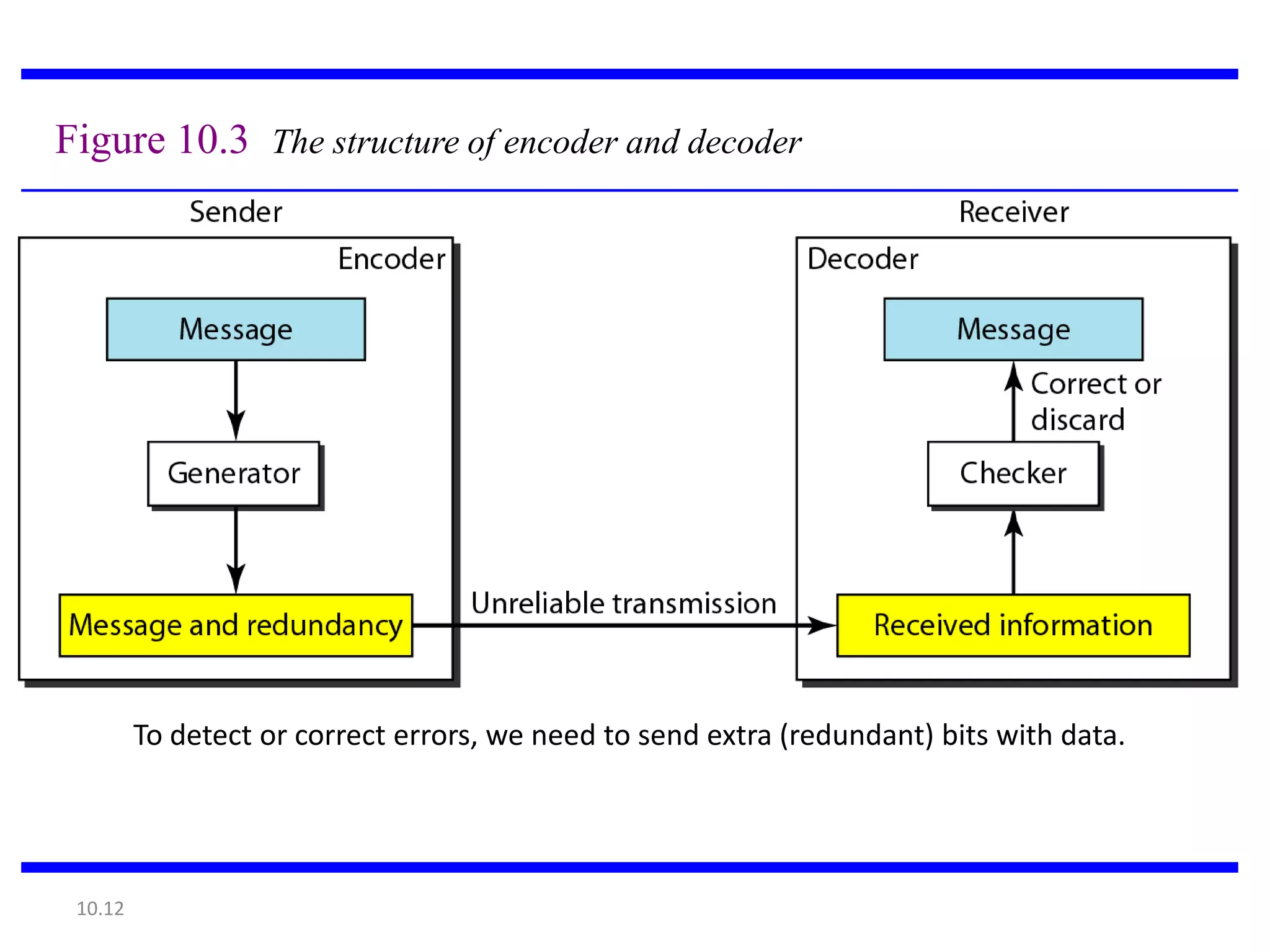
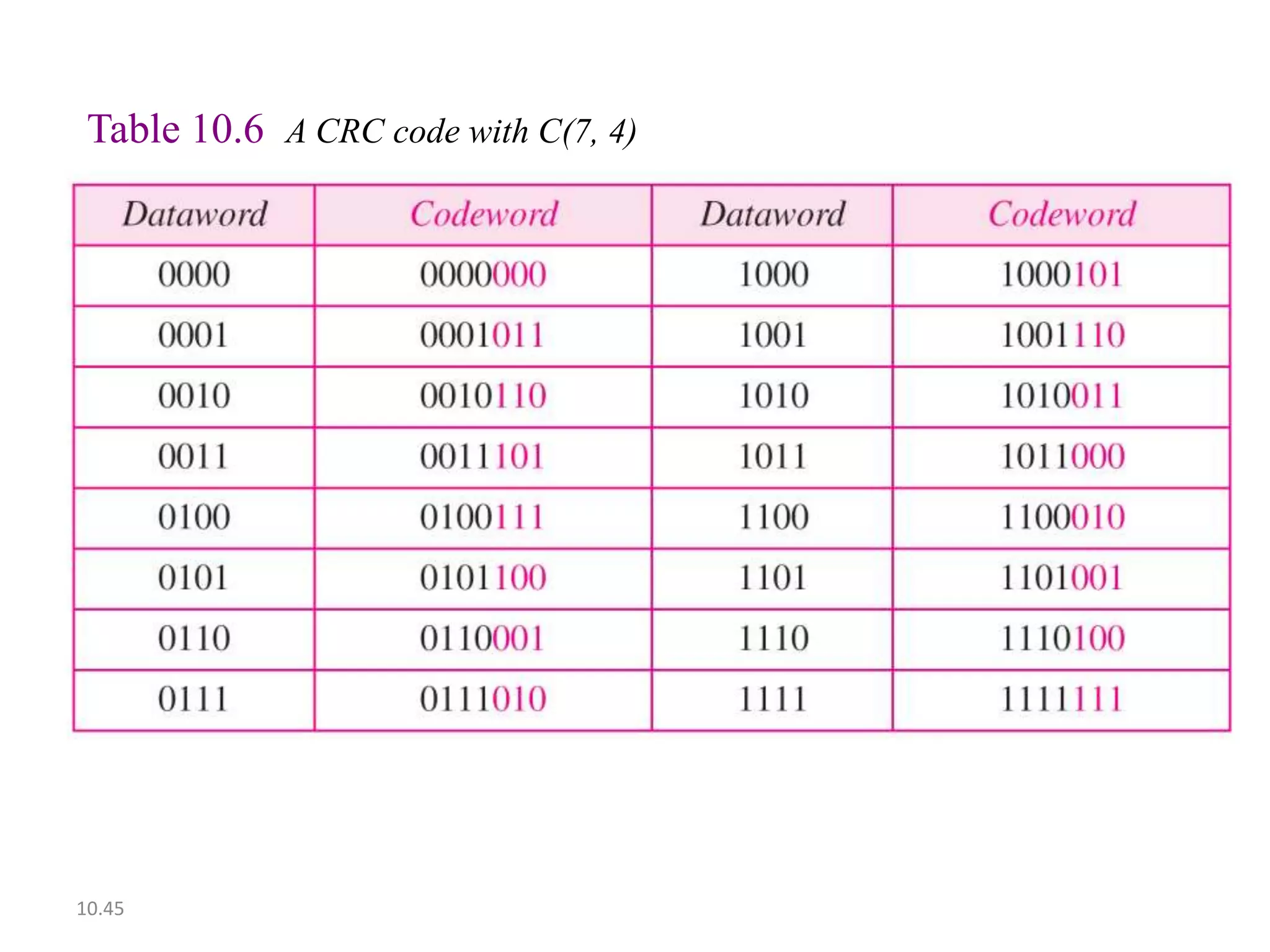
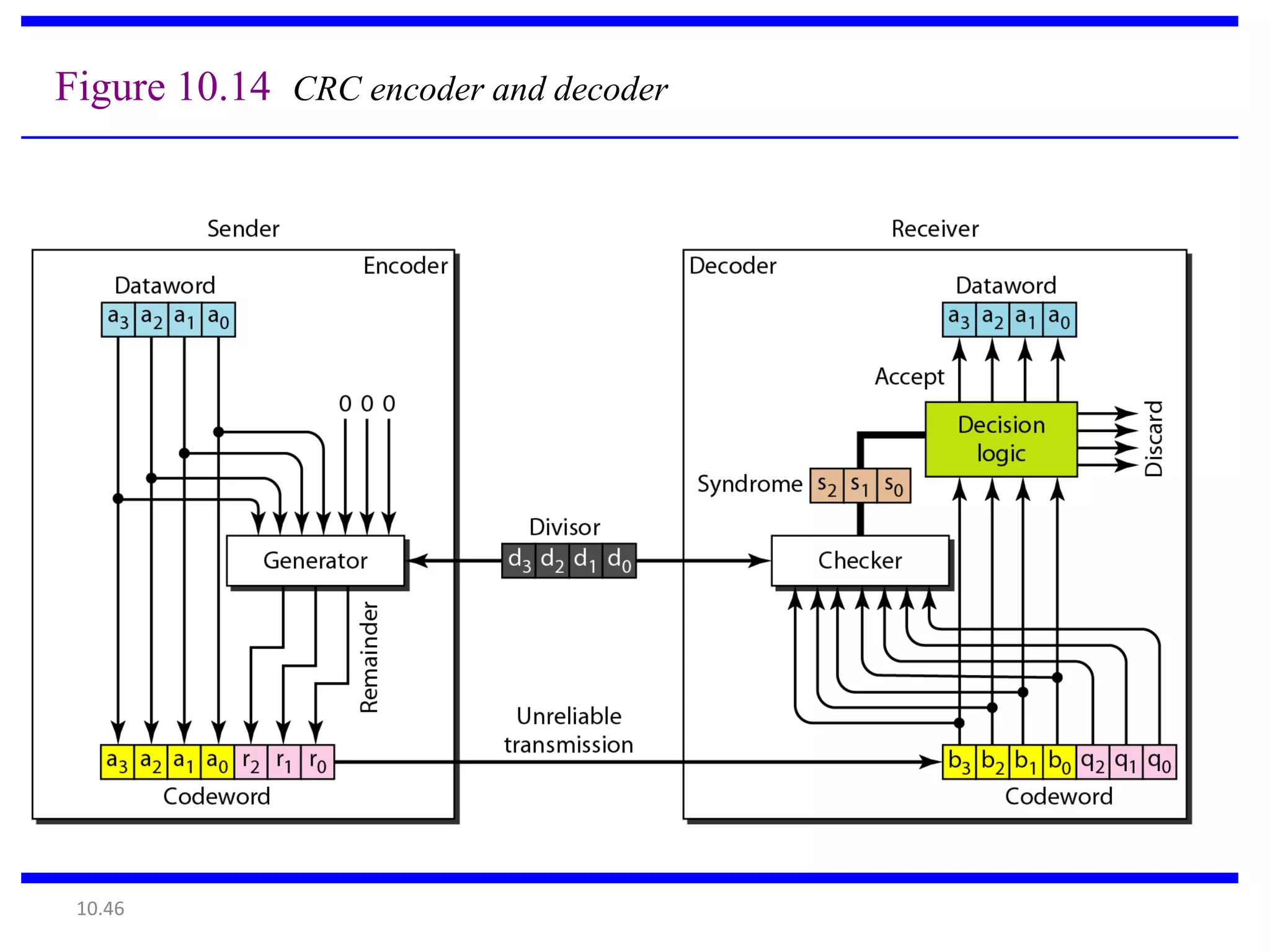
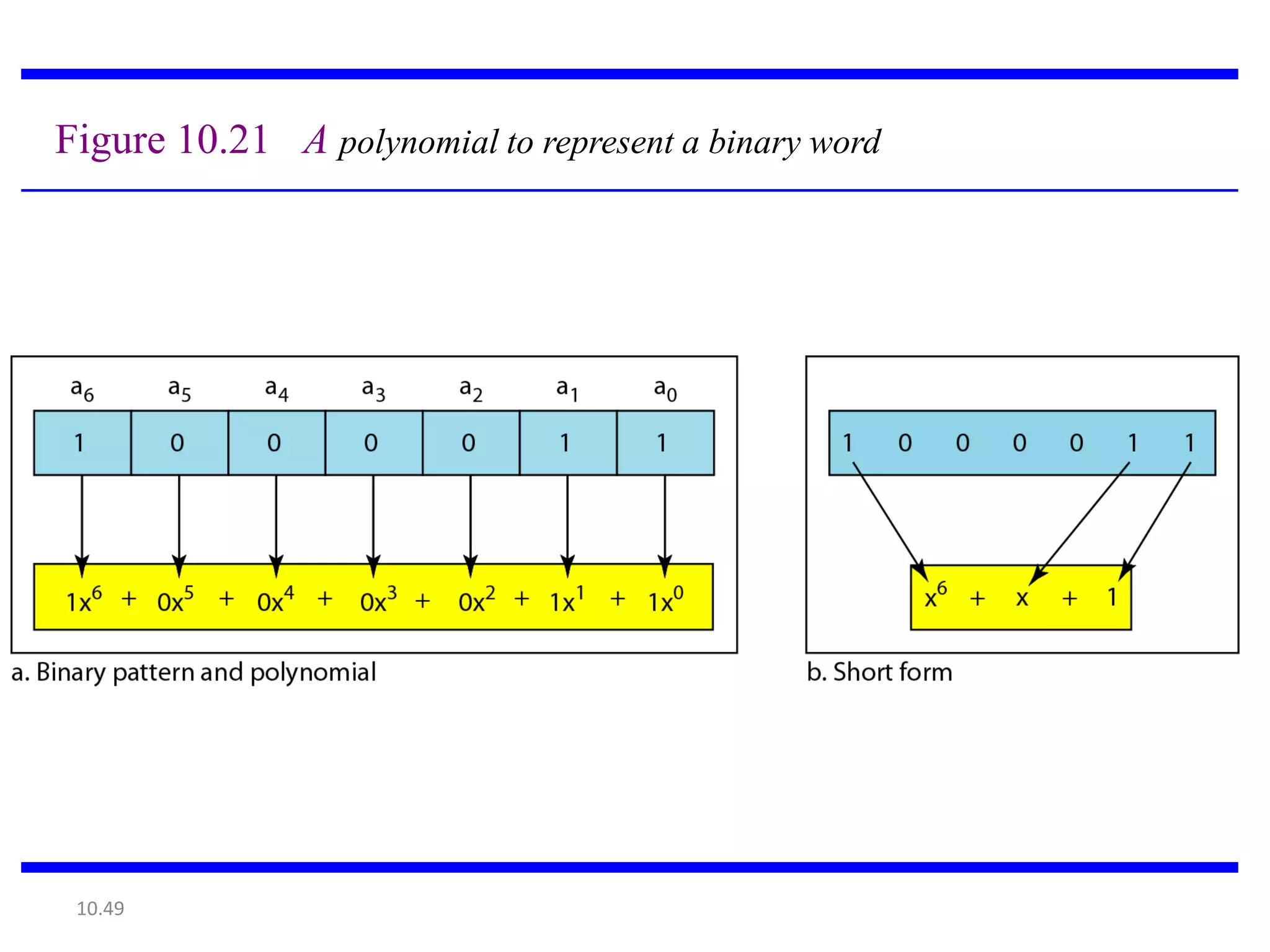
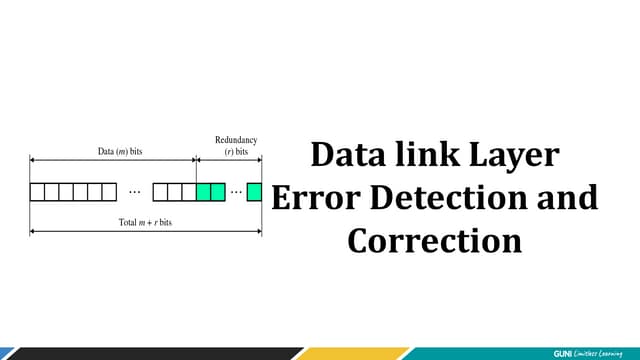
This document summarizes error detection and correction techniques. It discusses types of errors like single-bit errors and burst errors. It covers basic concepts of error detection, including adding redundant bits and using techniques like parity checks. Error correction requires knowing the number and positions of errors. Linear block codes and cyclic codes are introduced. Hamming distance and minimum distance are important metrics for error detection and correction capability. Specific codes like parity codes, Hamming codes, and cyclic redundancy checks (CRCs) are described through examples.