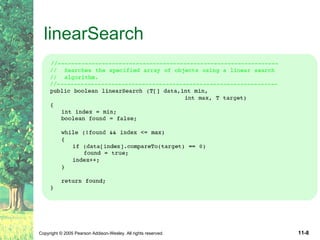
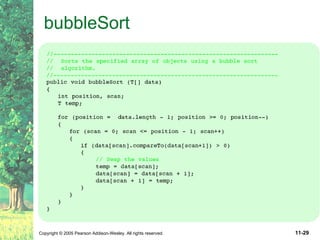
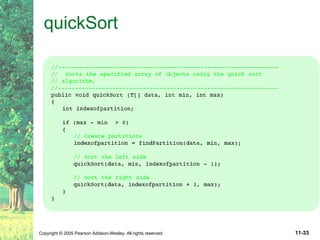
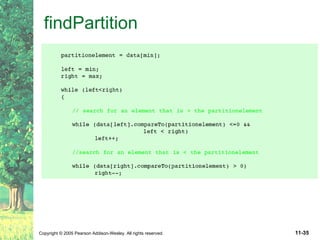
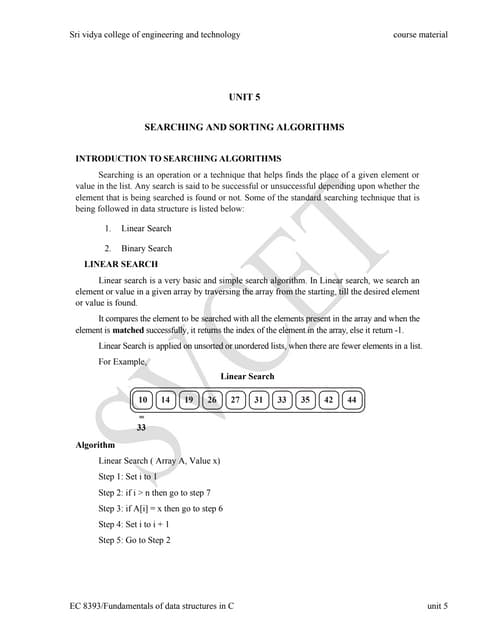
The document discusses various sorting and searching algorithms. It examines linear search and binary search algorithms. It also examines selection sort, insertion sort, bubble sort, quick sort and merge sort algorithms. Quick sort and merge sort have better time complexity than other algorithms discussed as they are both O(nlogn) algorithms.